棱镜式激光陀螺稳频伺服系统优化分析
2013-02-28刘健宁蒋军彪石顺祥马家君郭强
刘健宁,蒋军彪,石顺祥,马家君,郭强
(1.西安电子科技大学 技术物理学院,陕西 西安710071;2.西安北方捷瑞光电科技有限公司,陕西 西安710111 )
0 引言
全反射棱镜式激光陀螺[1-4](TRPLG)是一种高精度光电式惯性敏感仪表。它采用全反射棱镜组成光路,避免了反射镜镀膜工艺,具备抗空间辐射、性能稳定、可靠性高、环境适应性强等优点[2],目前已形成多种型号,获得了比较成熟的应用。TRPLG为了避免压电元件挤压使棱镜产生应力双折射效应,采用加热谐振腔内一段气体改变其折射率,达到稳频控制的目的。与传统反射镜式激光陀螺依靠压电元件直接改变光路稳频相比,热过程稳频光路对称性好,但由于热传递存在弛豫,稳频系统控制时间相对较长,不易稳定。而实验考察瞬态热传导过程难度较大,所以本文采用有限元分析法模拟热传导过程,对跳模瞬时谐振腔温度分布和伺服系统进行了优化分析并通过相应实验验证,理论分析与实验结果一致,该研究对该型陀螺稳频系统的稳定工作以及数字化稳频控制回路的研制有参考价值。
1 TRPLG 稳频系统工作原理
TRPLG 是通过控制毛细腔内稳频气体的折射率来实现稳频的。对稳频气体折射率的控制是通过控制伺服系统内部弹性膜片振动和实时改变加热丝上的电压来完成的。稳频气体温度控制过程本质上是一个毛细腔热传导过程。
图1 为棱镜式激光陀螺的稳频示意图。其稳频系统的工作过程具体可分为稳频工作过程和跳模控制过程。

图1 棱镜式激光陀螺稳频示意图Fig.1 Schematic diagram of prisms laser gyro frequency stabilization
1.1 稳频工作过程
TRPLG 的稳频是依靠稳频系统内部的弹性膜片配合加热丝实现的。在交流电驱动下弹性膜片振动引起腔道内空气密度波动,因为干燥气体的折射率与气体密度呈线性关系,所以膜片振动能够使激光器的光学腔长在一定范围内波动,激光频率在工作频率附近游走。光电探测器检测谐振腔输出光强的稳频参考信号,如图2(a)所示。
如果外界环境改变,谐振腔光学腔长变化,工作纵模偏离增益曲线中心位置,则稳频参考信号的相位、幅值将同步发生变化,具体表现为参考信号频率降低,幅值增大,如图2(a)中稳频参考信号曲线2所示。此时,稳频电路实时地检测出稳频参考信号的改变,并通过控制电路产生相应的反馈信号,控制伺服系统发热,使该单纵模重新回到介质增益曲线中心振荡,当单纵模位于介质增益曲线中心处振荡时,稳频参考信号的频率升高,幅值降低,如图2(a)中稳频参考信号曲线1 所示,此时,通过电路低通滤波器滤波,实际上不改变加热丝上电压。图2(b)、图2(c)分别描述谐振腔工作纵模向中心位置的低频端和高频端偏移的情况。注意这两种情况下,稳频参考信号的相位差π/2.由此,通过稳频系统判断稳频参考信号的幅度可确定工作纵模是否偏移,以及偏移量;通过稳频参考信号的相位,可以判定工作纵模相对中心位置偏移的方向,通过控制加热丝上电压的升降,实现闭环自动控制。

图2 稳频原理图Fig.2 Schematic diagram of frequency stabilization
1.2 跳模控制过程
当环形激光器工作频率偏离中心位置较大,超出稳频容限时,该系统将实施跳模控制。其原理:通过复位加热丝上的电压,即在加热丝上施加一个脉冲电压,使稳频气体温度突然升高,引起激光器相邻的纵模移进增益曲线内,原工作纵模移出增益曲线,整个跳模控制过程在几十毫秒内完成,是一个瞬态过程。
从以上对稳频控制过程和跳模控制过程的分析可以看出,稳频系统工作的核心是稳频气体的温度控制。由于热传导存在弛豫过程,因此严格分析稳频系统工作过程时需考虑:稳频过程中加热丝电压的积分速率;跳模时稳频系统施加脉冲电压的幅值、宽度;环形激光器双纵模交替时间的长短;确保一次跳模仅跳过一个纵模为最佳跳模状态等众多因素。
2 稳频过程温度场分布理论分析
2.1 稳频工作过程中气体热力学状态
稳频伺服系统的工作方式属于热力学范畴,所以,应当用热力学方法研究。建立如图3 所示的分析模型。图中空间Ⅰ内充满稳频气体,空间Ⅱ为真空。

图3 稳频伺服系统结构分析模型Fig.3 The structure model of frequency stabilization servo system
稳频工作过程是通过加热丝和弹性膜片的配合实现的,为了区分二者的功能,下面分2 步对其进行分析:
1)分析加热丝上直流电压变化导致的稳频气体状态的变化规律。
当陀螺开始工作后,由于环境温度变化及引燃后的自温升效应,其工作频率处在缓慢漂移中,为了抵消漂移保持工作频率稳定,稳频伺服系统的状态处于不断平衡调整中。因为电致加热丝发热时间远小于气体的热弛豫时间,所以可以认为系统处于准平衡态。设外界环境导致谐振腔光学腔长增加,则稳频伺服系统需要降低稳频气体的折射率以减小光学腔长,平衡变化。为此,加热丝上电压降低,空间Ⅰ内气体温度随之逐渐降低。
根据稳频气体折射率随温度的变化关系[5]:

式中:n0为θ = 0 ℃时的折射率;拟合因子α =0.003 68 ℃-1,α 的精度达到10-5℃-1.可见,利用加热丝上电压的变化,进而改变环形光路内一段稳频气体的温度,可以改变稳频气体的折射率。设外界环境变化导致谐振腔光学腔长变为l +Δl.为了抵消光学腔长的变化,稳频气体的折射率受到伺服系统控制变为n +Δn.显然,为了保持谐振腔光学腔长不变,Δn 应满足

式中:lg为充有稳频气体的毛细腔几何长度。将(1)式带入并求导数,得到

根据环形激光器工作频率与谐振腔长的关系ν=c/l,c 为光速,可得

(4)式是该型陀螺稳频伺服系统对工作频率漂移的补偿方程,其中温度θ 是可控制量。可见,在稳频过程中,稳频气体的温度与陀螺工作频率相关,证明了依靠热过程稳频的可行性。
2)分析压电元件上的交流电压周期变化导致稳频气体状态改变的规律。
压电陶瓷片上的交流电压周期变化导致空间Ⅰ内的气体密度受到周期性调制:


式中:Cλ为与入射稳频气体的光的波长相关的系数,Cλ=77.48(1 +6.063 ×10-3λ-2)×10-6.
光学腔长所对应的陀螺工作频率νq模调制的谐振频率为

在陀螺实际工作中,环境温度很少突变,即使环境温度突变,温度梯度传至谐振腔微晶玻璃材料内部也会经历一个相对较长的时间,使得陀螺工作频率漂移相对于现有稳频控制慢得多。所以,这种陀螺在稳频控制过程中精度表现较好。而在跳模控制过程中,由于热弛豫的存在,将延长陀螺频率不稳定时间,这将对陀螺的稳定工作造成影响。如果某些参数设置不合适,将造成陀螺精度下降,甚至由跳模现象引起故障,故采用有限元分析法进一步分析跳模控制过程。
2.2 跳模控制过程有限元分析
2.2.1 分析模型
本文按照与实际伺服系统等比例相同结构,建立的有限元分析模型如图4 所示。

图4 热分析模型Fig.4 Thermal analysis model
包括稳频气体、加热丝、棱镜玻璃3 种材料。结构包括加热丝、绝热橡胶管、毛细腔、两侧保护罩、棱镜5 部分。其中,毛细腔内部充有稳频气体,其直径仅1 mm,加热丝直径仅0.05 mm.在微观条件下,稳频系统的结构将决定终态温度分布及热传递的速率。
2.2.2 物理理论与数学模型
图4 中模型的温度分布随时间的变化满足热传导通用微分方程[6]

式中:θ 为分析模型的温度;μ 为导热系数;qν为热源的发热率密度;ρ 为气体密度;cp为定压比热容。材料导热系数、密度以及定压比热容如表1 所示。
为得到微分方程(9)式的解,必须根据所研究的具体问题给出定解条件,即边界条件。边界条件分为3 类:1)任意瞬时物体表面的温度θt=fx,y,z,t;2)任意瞬时物体表面的热流密度;3)物体周围介质的温度θh,以及周围介质与物体表面间的换热情况,即给定换热系数β.按照公式

表1 材料物理性质Tab.1 The physical properties of materials

计算。在本文中,模型的初始条件设定为25 ℃,不同区域的边界条件为:
1)对流作为面载荷,施加在加热器电阻丝及周围空气上,以及保护罩内空气与棱镜的接触处。ANSYS 软件可以通过设置材料比热容以及热导率的方式实现对这部分边界条件的设置。
2)热生成率作为面载荷,将单位面积的热流率,施加在加热丝与周围空气的接触面上,即设置方程(9)式中的qν.运算时,qν的表达式为

式中:Q 为热辐射功率;U(t)为加热丝两端电压,为一个时变函数;R 为加热丝阻值;S 为加热丝与稳频气体接触的外表面积。
电压U(t)的函数模型参照热力学描述热辐射过程的函数

式中:t 为时间;C1、C2为系数,取不同值对应着稳频过程中所施加的电压形式不同。
通过大量的模拟、实验,证明陀螺跳模时满足稳频需要的最佳电压形式是存在的。为了说明简单,在此列举有代表性的3 组U(t)说明计算结果。

分别命名为热源1、热源2、热源3,3 种热源的函数图像如图5 所示。
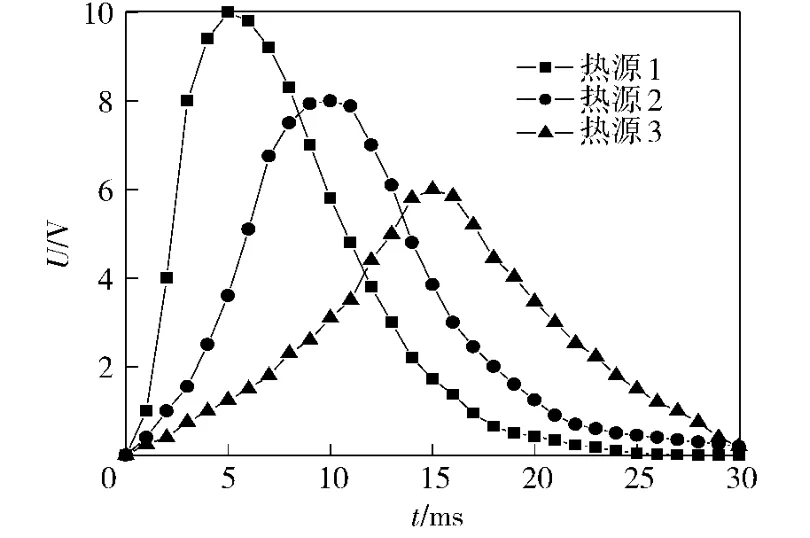
图5 3 种热源函数图Fig.5 The three heat source functions graph
热源1 函数幅值高,电压施加时间短;热源3 函数电压幅值低,电压施加时间长;热源2 函数相对于热源1、热源3 幅值和时间宽度适中。3 组热源功耗基本相等,即它们的电压曲线与时间轴(x 轴)所包围面积保证基本相等,只是能量传导速率不同。
分析时选用步进式贯序耦合的计算方式,前一次计算所得的热场结果作为后一次计算的载荷,从而实现时间先后上的热场耦合。计算递进时间步长选择为2 ms,总计算时间为30 ms.
由于控制系统是利用热传导过程实现稳频控制的,热效应的弛豫时间、脉冲电压的幅度、宽度等会直接影响稳频系统的响应时间。因此,研究稳频系统的瞬态热工作过程,对了解棱镜式激光陀螺稳频系统的工作原理,进一步优化控制参数有重要意义。
3 结果分析
将(11)式、(13)式及相关材料参数带入方程(9)式,用ANSYS 模拟。
3.1 热源2 模拟结果
图6 为有限元分析网格图,由于加热丝细且密绕,模型中不同材料间的交界面多,所以网格划分细密。图7 为计算得到的加热丝加热8 ms 后的温度分布图,此时毛细腔内最高温度为23.16 ℃,最低温度为21.89 ℃,与初始温度20 ℃相比均有一定的温升。

图6 模型网格图Fig.6 The grid chart of model
选取模型上2 个代表性位置:1)加热丝;2)稳频气体。2 个位置在加热过程中温度随时间的变化曲线如图8、图9 所示。
根据图8 温度与时间曲线,电压作用加热丝19 ms 后,加热器内部基本达到热平衡,温度不再剧烈变化。稳频气体温度约24 ms 后平衡,2 个位置存在约5 ms 的延时,这是热传导时间。稳频气体温度变化较平缓,所达到的最高温度较加热器低1 ℃左右。温度梯度分布是由稳频系统结构决定的,理想状态是适当减少热传导时间,同时保证稳频气体的温度变化斜率平缓,避免热气体冲击棱镜影响光路稳定。

图7 温度分布图Fig.7 The temperature distribution of model

图8 加热丝温度变化曲线Fig.8 Temperature change curve of heating wire

图9 稳频气体温度变化曲线Fig.9 Temperature change curve of frequency stabilization gas
利用(1)式结合任意时刻稳频气体轴线上的温度分布模拟结果,结合棱镜玻璃折射率随温度改变的特性数据,可以计算出在热源2 作用下,陀螺1 次跳模跳过1.5 个纵模,如图10 对应曲线所示。谐振腔光学腔长改变来源于2 个方面:1)稳频气体受热折射率变化;2)封闭稳频气体的2 个全反射棱镜通光位置温度传入一段距离,由此引起的折射率改变。通过有限元分析,可以定量二者对跳模过程的贡献比例为3∶1.也就是如果稳频气体造成谐振腔光学腔长变化474 nm,则棱镜温升造成谐振腔光学腔长变化158 nm.
3.2 热源1 和热源3 模拟结果
在热源1 作用下,分析结果表明陀螺整个跳模过程最多跳模0.8 次;在热源3 作用下,分析结果表明陀螺整个跳模过程最多跳模2.5 ~3 次。如图10所示,在3 种热源作用下,陀螺在30 ms 内跳模次数的对比统计,对比发现,热源2 模拟结果对于稳频系统的跳模控制是比较理想的。

图10 3 种电压脉宽对应跳模次数对比Fig.10 The numbers of mode jumping for different voltage pulse widths
4 实验结果及优化设计
4.1 实验结果
为了证明上述结论,在常温25 ℃环境下进行实验,对同一陀螺分别应用上述3 种稳频控制参数,通过对比陀螺测角速度精度情况,衡量3 种控制参数下稳频系统的工作质量。
图11 为应用了热源1 控制电压作用下陀螺精度测试结果。如图11(a)所示,陀螺系统每100 s 记录1 个数据点,总测试时间超过2 h;如图11(b)所示,电压曲线上跳代表陀螺稳频系统进行跳模动作。除去跳模点,该陀螺单位时间(每100 s)内光电探测器计数表面扫过705 条暗纹,条纹计数统计基本上呈现为一条直线,精度良好,但陀螺在跳模过程中精度计数突然消失。出现该故障的原因是由于跳模时施加在跳模控制单元上的脉冲电压不满足正常跳过一个纵模的最低要求,导致稳频系统较长时间失效,原有暗纹消失,随着稳频系统的自动控制补偿,陀螺需要相对较长时间继续完成跳模动作,当稳频系统恢复正常工作时,精度重新正常。

图11 应用热源1 陀螺样本精度测试曲线Fig.11 The accuracy curves of gyro in the use of heat source 1
图12 为应用了热源2 电压作用下陀螺精度测试结果,该陀螺在整个测试阶段,精度优于0.005(°)/h,跳模过程不影响精度计数,满足要求。

图12 应用热源2 陀螺样本精度测试曲线Fig.12 The accuracy curves of gyro in the use of heat source 2
图13为应用了热源3 电压作用下陀螺精度测试结果,可以看到跳模前后陀螺精度计数基准发生了跳变,单位时间计数由770 条变为760 条,陀螺单位时间内精度计数[7]可以写为

式中:φ 为陀螺的总转角;A 为环形腔所包围面积。根据(14)式解释出现图13 现象的原因是:在热源3电压作用下,陀螺1 次跳模过程中跳过了多个纵模,这将造成谐振腔光学腔长变化量过大,尤其因为谐振腔光路上的稳频气体密度、压强较大幅度上升,导致跳模前后纵模损耗相差大,造成精度计数基准改变。由此引起跳模精度跳台阶,影响陀螺性能。所以,为了缩短热弛豫时间盲目地增加稳频系统跳模过程加热能量会造成陀螺严重的功能性故障。

图13 应用了热源3 陀螺样本精度测试曲线Fig.13 The accuracy curves of gyro in the use of heat source 3
有必要指出的是:3 次实验陀螺单位时间内精度基准存在差异,这是测试过程中陀螺仪表没有彻底消磁造成的,不影响陀螺稳频效果的观测。通过实验结果,可以认定热源2 是这套稳频系统较理想的稳频系统控制参数。
4.2 优化设计
针对3 组热源参数的模拟和实验结果均表明:常温下这种陀螺稳频伺服系统的最佳控制参数是存在的,在此最佳参数基础上,为了缩短跳模控制时间,盲目增加幅值、减少加热时间,或为了使跳模控制中温度场分布变化平稳,增加加热时间、减少电压幅值,所得到的陀螺精度表现均不理想。
实际中,利用这组优化参数,陀螺稳频控制获得了很好的效果,陀螺精度普遍提高。
5 结论
为了克服棱镜式激光陀螺稳频过程中热传导弛豫时间过长对陀螺精度的影响,本文依据实际建立了有限元分析模型,选取有代表性的3 组控制参数分别模拟计算,并通过测试陀螺精度评价控制系统稳频效果,最终得到一组脉冲电压为系统常温下较理想的控制参数。实验证明这种优化设计对提高棱镜式激光陀螺精度很有帮助。
References)
[1]Bakin Y V,Ziouzev G N,Lioudomirski M B.Laser gyros with total reflection prisms[J].Gyroscopes Optiques Et Leurs Applications,1999,(399):125 -128.
[2]姚呈康,曾晓东,曹长庆.机械抖动棱镜式激光陀螺出射光强度特性[J].物理学报,2012,61(9):094216.YAO Cheng-kang,ZENG Xiao-dong,CAO Chang-qing.Intensity properties of output light in prisms laser gyro with mechanical dither bias[J].Acta Physica Sinica,2012,61(9):094216.(in Chinese)
[3]黄勇,蒋军彪.棱镜式激光陀螺数字稳腔长控制系统[J].弹箭与制导学报,2008,28(6):67 -68.HUANG Yong,JIANG Jun-biao.A digital path length and light intensity control system for laser gyro[J].Journal of Projectiles,Rockets,Missiles and Guidance,2008,28(6):67 -68.(in Chinese)
[4]Peshekhonov V G.Gyroscopic navigation system:Current status and prospects[J].Gyroscopy and Navigation,2011,2(3):111 -118.
[5]刑进华.温度对气体折射率的非线性影响[J].物理实验,2005,25(4):36 -37.XING Jin-hua.Influence of temperature on the refractive index nonlinearity of gas[J].Physics Experiment,2005,25(4):36 -37.(in Chinese)
[6]宋林森,史国权,李占国.利用ANSYS 进行激光打孔温度场仿真[J].兵工学报,2006,27(5):879 -882.SONG Lin-sen,SHI Guo-quan,LI Zhan-guo.Simulation of laser drilling temperature field by using ANSYS[J].Acta Armamentarii,2006,27(5):879 -882.(in Chinese)
[7]战德军,秦石乔,王省书.基于滑动平均的速率偏频激光陀螺静态角速率测量算法[J].光学学报,2009,29(11):3198 -3199.ZHAN De-jun,QIU Shi-qiao,WANG Xing-shu.Algorithm of measuring rate biased laser gyro static angle rate based on moving average[J].Acta Optica Sinica,2009,29(11):3198 -3199.(in Chinese)
[8]汪之国,龙兴武,王飞.四频差动激光陀螺自适应程长控制技术[J].中国激光,2012,39(9):48 -52.WANG Zhi-guo,LONG Xing-wu,WANG Fei.Adaptive path length control technique for four-mode differential laser gyro[J].Chinese Journal of Lasers,2012,39(9):48 -52.(in Chinese)
