基于传动系统效率最优的混合动力汽车控制策略研究
2013-02-08李琳辉周雅夫
连 静, 韩 虎, 李琳辉*, 周雅夫, 冯 剑
(1.大连理工大学工业装备结构分析国家重点实验室,辽宁大连 116024;2.大连理工大学汽车工程学院,辽宁大连 116024;3.空军驻沈阳地区军事代表室,辽宁沈阳 110016)
0 引 言
混合动力汽车具有两种车载能量源[1]:一种是具有高能量密度的能量源——发动机,一种是具有高功率密度的能量源——电机,它们与作为能量存储装置的蓄电池组合在一起,通过良好的匹配和优化控制[2],可以充分发挥传统汽车和纯电动汽车的优点,并规避各自的不足,是当今解决能源和排放问题最具现实意义的车辆之一[3].
在现有混合动力汽车控制方法上,较少考虑整个传动系统的效率,导致功率损失大,较高的功率损失会使传动装置效率下降,使润滑油过早变质,恶化润滑条件,还会缩短传动部件的使用寿命[4-5].由于混合动力系统中发动机、电机、蓄电池和变速器等的最优效率工作区各不相同,只有使混合动力传动系统工作时的总体效率达到最大,才能使整车功率损失最小,整车的燃油消耗和排放理想,润滑条件和传动部件寿命良好[6-7].因此,本文以大连市示范运行的并联式混合动力公交车为研究对象,提出一种基于系统效率最优的混合动力汽车控制方法.该方法根据需求扭矩的大小和蓄电池荷电状态SOC范围确定所有可能的工作模式,分别计算出不同工作模式下的系统效率,通过比较不同工作模式下混合动力系统的效率,得出系统最高效率下对应的发动机转矩和电机转矩分配值,控制发动机和电机输出相应转矩,并建立整车模型进行仿真实验.
1 整车结构
本文选择双轴并联式混合动力公交车为研究对象,其结构示意图如图1所示.该公交车为后置后驱,其参数如表1所示.发动机通过离合器与扭矩合成器的一个输入轴连接,电机与扭矩合成器的另一个输入轴连接,扭矩合成器的输出轴与机械式自动变速器连接,然后通过主减速器连接到驱动轮,上述连接均为机械连接;蓄电池通过逆变器与电机连接,三者之间的连接为电气连接.

图1 混合动力汽车结构图Fig.1 Schematic diagram of the HEV

表1 混合动力汽车参数Tab.1 The parameters of HEV
2 整车模型构建
2.1 发动机模型
发动机是一个复杂的非线性系统[8],由于建立发动机燃油经济性和排放性能的理论模型涉及大量的微分方程,计算工作量大、时间长,难以在发动机的实时控制中实现[9].因此,在混合动力电动汽车中,主要通过发动机性能试验数据建立发动机数值计算模型.本文发动机模型亦采用试验方法建立,所测得的发动机模型MAP图如图2所示.
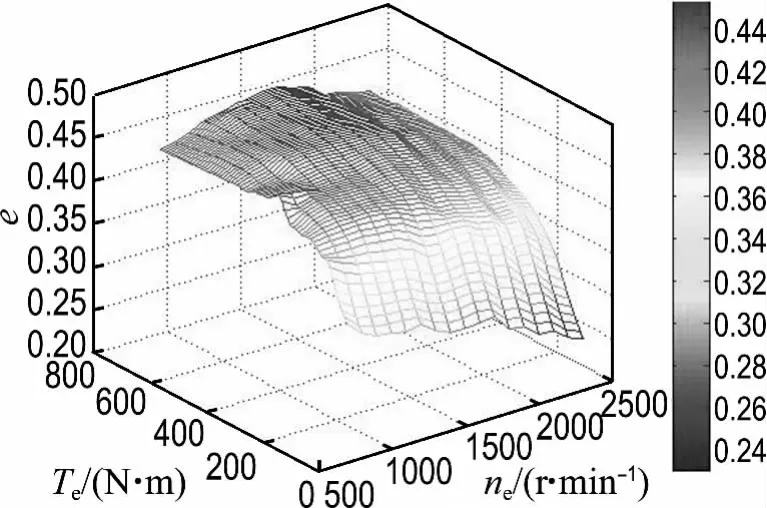
图2 发动机模型MAP图Fig.2 The MAP graph of engine model
2.2 电机模型
电机模型的建立基于台架试验数据,通过查表法得到.在驱动电机试验平台上,基于标定试验形成的MAP图进行电机工作效率试验,通过测量n-T图上各电机工作点处电机的输入电压、输入电流,电机输出的转速、转矩,求得各工作点的电机工作效率,在试验台架上测得的电机转速-转矩-效率MAP图如图3所示.

图3 电机模型MAP图Fig.3 The MAP graph of motor model
2.3 蓄电池模型
本文采用内阻模型,将电池看作一个理想电压源和一个内阻串联的等效电路.电池SOC是描述电池状态的重要参数,计算采用安时积分法.计算公式为

式中:SOC0为蓄电池SOC初始值;Qn为蓄电池额定容量,C;I为蓄电池发电电流,A.当I为正值时,电池放电,SOC将减小;I为负值时,电池充电,SOC将增大.模型中把I作为开路电压E和内阻R的函数,而E和R又都是SOC和温度T的函数.因此,根据装配于PHEV上的40 Ah镍氢电池的试验数据,得到不同温度下的开路电压E和内阻R随电池SOC变化的曲线簇,通过拟合公式可求出E和R,从而计算SOC和电流I.
2.4 整车动力学模型
假设路面坡度为α,可得到车辆行驶时的驱动力平衡方程:

式中:m为整车质量,kg;g为重力加速度,为9.81 m/s2;f为滚动阻力系数,与轮胎压力成正比;Cd为风阻系数;C为常数21.15 N·m-2;A为迎风面积,m2;v为车速,km/h;δ为旋转质量换算系数;a为车辆加速度,m/s2.
3 控制策略设计
3.1 工作模式划分
根据并联混合动力汽车传动部件布置形式,将该车的工作模式划分为5种,分别是纯电机模式,纯发动机模式,发动机、电机联合驱动模式,发动机驱动、电机发电模式,怠速/停车模式.
3.2 各工作模式的效率评估
在各工作模式中,每个传动部件的效率随着路况及使用条件的不同而不同,这就决定了不同工作模式下的传动系统效率评估公式不同.本文构建的不同模式下混合动力传动系统总体效率公式如下:
纯电机模式下的效率评估公式为


发动机、电机联合驱动模式下的效率评估公式为

发动机驱动、电机发电模式下的效率评估公式为

式中:Pr、Pb分别为需求功率、蓄电池放电功率,k W;P′b为发动机驱动、电机发电模式下蓄电池充电功率,k W;P″b为怠速/停车模式下蓄电池充电功率,k W;Pm、Po分别为电机驱动功率、燃油箱功率,k W;ηt、η′t分别为传动系统的效率、发动机到电机的传动效率,取平均值,为常数;ηe、ηm、ηdis、ηchg分别为发动机、电机、蓄电池放电、蓄电池充电的效率;η′m为电动机发电时的效率;k为发动机驱动、电机发电模式下发动机分配到电机的分配比;ic为扭矩合成器传动比,为常数;Te、Temin、Temax分别为发动机转矩、发动机高效区最小转矩、发动机高效区最大转矩,N·m;Tm、Tmmax、T′m、T′mmax分别为电机驱动时的转矩、电机的最大驱动转矩、电机发电时的转矩、电机的最大发电转矩,N·m;Tr为需求转矩,N·m;ne、nm分别为发动机、电机的转速,r/min.
3.3 转矩分配

图4 混合动力汽车控制逻辑Fig.4 Control logic of HEV
根据需求扭矩的大小和蓄电池荷电状态SOC范围确定可能的工作模式,分别计算出不同工作模式下的系统效率,通过比较不同工作模式下混合动力系统的效率,得出系统最高效率下对应的发动机转矩和电机转矩的分配值,其控制逻辑如图4所示.这里可以看作是一个数学优化问题,通过需求扭矩和蓄电池SOC范围确定可能的工作区域,这些可能的工作区域就位于若干个工作模式下的约束范围内,目标函数为不同工作模式下传动系统效率计算公式,通过线性约束优化方法获得目标函数最优值,从而得到最优效率下对应的发动机和电机转矩.
4 仿真与结果
4.1 整车仿真模型
本文基于Simulink和Cruise按照图1结构建立并联式混合动力公交车的仿真模型(如图5所示).图中,A为蓄电池模块,B为电机模块,C为变速器模块,D为离合器模块,E为发动机模块,F为控制策略模块,G为方向盘模块,H为主减速器模块,I为制动器模块,J为车轮模块,K为监测模块,各模块按照前文所述的连接关系进行连接.仿真过程中所用的循环工况为根据自主研发的电动汽车数据采集系统,对大连市试验运行的混合动力公交车进行3年的数据采集,所构建的大连市循环工况(如图6所示),该工况更符合大连地区实际路况特征,因此以该工况进行试验更符合车辆实际运行状况,使试验结果更准确.

图5 混合动力整车仿真模型Fig.5 Simulation model of HEV
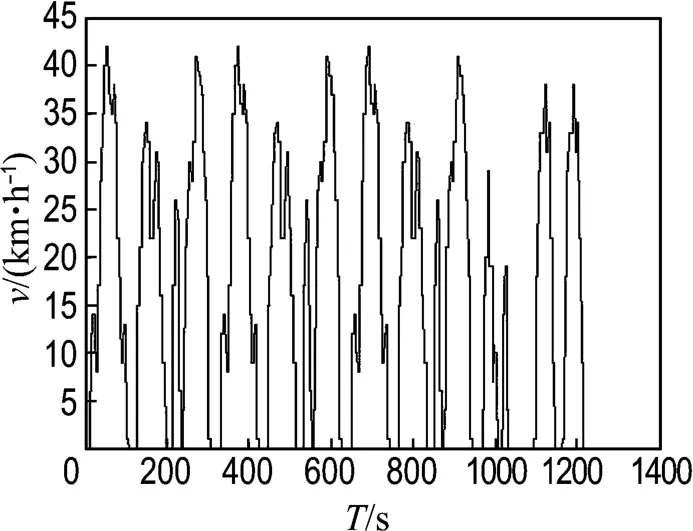
图6 大连市循环工况Fig.6 Driving cycle of Dalian City
在仿真过程中,整车按照大连市循环工况行驶,由循环工况获得需求转矩,根据本文设计的控制策略确定动力系统各部件应提供的转速、转矩等,以此作为车辆最终工作性能分析的依据.
4.2 仿真结果分析
图7为混合动力公交车上发动机在大连市循环工况运行过程中的工作点.从图中可以看出,发动机始终工作在效率较高的区域,该区域具有较好的燃油经济性和排放性.图8为混合动力公交车上电机在大连市循环工况运行过程中的工作点.从图中可以看出,电机无论是出于电动状态还是发电状态,始终工作在效率较高的区域,能量利用率高.将本文提出的基于系统效率最优的方法(记为方法1)与实际运行的混合动力公交车所采用的基于逻辑门限值的控制方法(记为方法2)所统计的最小燃油消耗值(百公里油耗为27.5 L)进行比较,采用方法1所得的燃油消耗比方法2所得的燃油消耗降低6.9%.
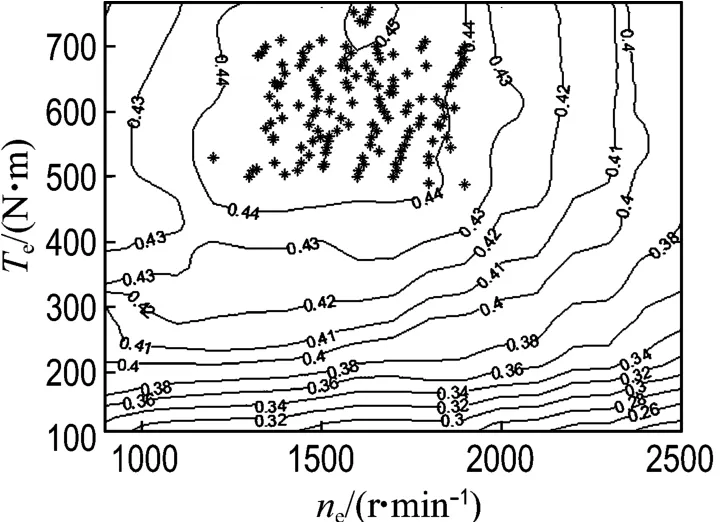
图7 基于大连循环工况的发动机工作点Fig.7 Engine operating points for Dalian driving cycle

图8 基于大连循环工况的电机工作点Fig.8 Motor operating points for Dalian driving cycle
5 结 语
本文对混合动力汽车控制方法进行了深入研究.针对现有混合动力汽车控制方法存在功率损失大、系统效率低、润滑条件恶化等问题,提出一种基于系统效率最优的混合动力汽车控制方法.该方法通过分析传动系统各部件的结构和效率特性,在此基础上确定各部件运行的最优效率区,根据汽车的运行状态控制它们运行在高效率点,实现整个混合动力传动系统总体效率最优,能量利用率高;该方法功率损失减小,散热量减小,在保证良好燃油经济性的同时改善了润滑条件,延长了传动部件使用寿命.
[1] 张 然,赵志军.浅析混合动力汽车总成结构与能量控制策略[J].节能与环保,2011(3):48-50.ZHANG Ran,ZHAO Zhi-jun.Analysis of power-train structure and energy control strategy for hybrid electric vehicle[J].Energy Conservation and Environmental Protection,2011(3):48-50.(in Chinese)
[2]Kermani S,Delprat S,Guerra T M,etal.Predictive energy management for hybrid vehicle[J].Control Engineering Practice,2012,20(4):408-420.
[3]Pierluigi P,Giorgio R.A comparative study of supervisory control strategies for hybrid electric vehicles[J].IEEE Transactions on Control Systems Technology,2007,15(3):506-518.
[4]Sciarretta A,Guzzella L.Control of hybrid electric vehicles[J].IEEE Control Systems Magazine,2007,27(2):60-70.
[5]Oh K,Min J,Choi D.Optimization of control strategy for a single-shaft parallel hybrid electric vehicle[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2007,221(5):555-565.
[6]Kim N,Cha S,Peng H.Optimal control of hybrid electric vehicles based on Pontryagin′s minimum principle[J].IEEE Transactions on Control Systems Technology,2011,19(5):1279-1287.
[7]Mashadi B,Emadi S A.Dual-mode power-split transmission for hybrid electric vehicles[J].IEEE Transactions on Vehicular Technology,2010,59(7):3223-3232.
[8]Ito Y,Iwase M,Sadahiro T,etal.A model-based torque estimation for combustion engines and experimental verification[C]//Proceedings of the IEEE International Conference on Control Applications.Piscataway:IEEE,2010:707-712.
[9]Koprubasi K,Pezzini A,Bezaire B,etal.Application of model-based design techniques for the control development and optimization of a hybrid electric vehicle[C]//SAE Technical Paper.Warrendale:SAE International,2009:10.4271/2009-01-0143.
