基于LQG控制器的四旋翼无人机姿态控制
2013-01-16朱雄军
朱雄军
(江苏宝科电子有限公司 江苏扬州 225009)
0 引言
无人机(Unmanned Aerial Vehicle)是一种由无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器。近年来,随着微机电系统(MEMS)技术和微惯导(MIMU)等相关技术的发展,微型无人飞行器成为无人机领域的研究热点之一,世界主要国家在发展长航时无人机和作战无人机的同时,也在着力发展小型和微型无人机,不断研制无人机小型化,甚至微型化的技术[1]。
1 四旋翼无人机建模与控制器设计
首先,建立空间惯性坐标系和机体坐标系如图1所示。
运动方程可由式(1)牛顿-欧拉方程给出,
式(1)中质量 m∈R,转动惯量 J∈R3×3,外力向量 F∈R3,转矩向量 Γb∈R3,V=(u,v,w),Ω =(p,q,r)分别为惯性坐标系和机体坐标系内的角速度。
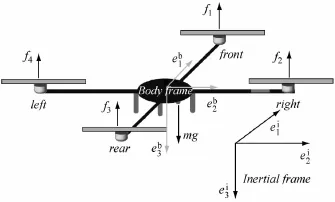
图1 机体坐标系与惯性坐标系
考虑到这种从机体坐标系到惯性坐标系的转化,可以把重力分解到其他方向,从而得到了平移动力学表达式如下:

式中Φ(η)由下式给出
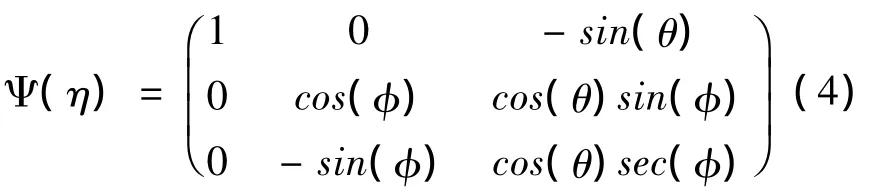
进而得到电机的转矩表达式

上面的转矩表达式为非线性的,为了将其线性化,假设姿态角度的变化很小,且姿态角不存在同时变化的情况,因此可以将模型的非线性化方程化为如下方程,

式中τ为转矩向量,J为转动惯量,η为欧拉角。
对于四旋翼无人机来说,滚转和俯仰角是通过电机转速控制实现的,因此无法使用稳定器[2],为了实现飞行器的稳定控制,引入陀螺仪角速度传感器测量角速度,以实现角速度的反馈控制如图2所示。
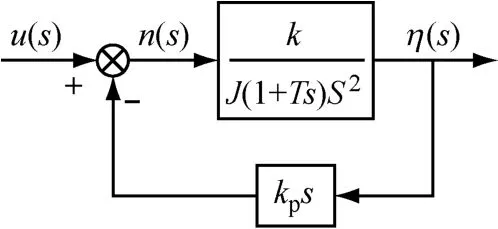
图2 角速度反馈控制
因角速度的反馈控制为比例控制,系数为kp,从输入信号到角速的传递函数为

将上面的模型传递函数式用状态空间表示

2 控制器设计
采用线性二次型高斯函数/回路传递复现法(LQG/LTR)实现飞机的姿态控制[3]。(LQG/LTR)是一种流行的伺服控制器设计方法,LQG/LTR方法基于分离定理[4],包括设计一个全状态反馈控制器,然后设计一个观测器来提供反馈所需的状态量估计,最终得到一个与经典控制方法中类似的动态补偿器。
2.1 线性二次型性能指标的最优控制
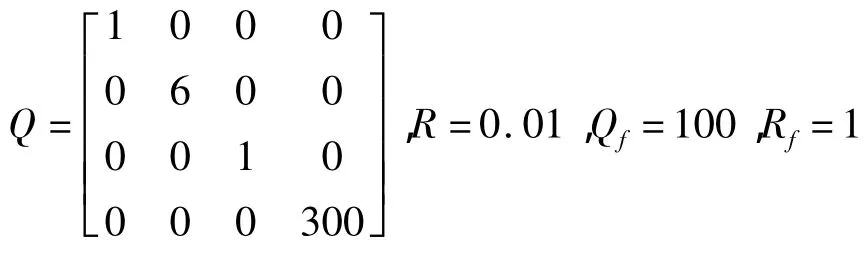
对于上式所描述的为定常线性系统。定义指标泛函为[5]

式中矩阵S为半正定对称常数阵,Q为半正定对称矩阵,R为正定矩阵。寻求综合控制函数u*(t)使J有最小值。
结合姿态控制的具体要求,为实现控制器的输出能够跟踪输入信号的变化,引入误差

式中y(t)为系统输出,η(t)为理想的系统输出,并考虑从零时刻开始,则可将指标泛函改写为

系统虽能跟踪目标,但无法保持飞行状态的平稳,控制效果不会很理想。为此,考虑设计LQI伺服控制器,以保持中间状态变量的平稳变化,增强无人机的稳定性,同时可以跟踪目标。首先引入一个额外的状态变量 xr(t),xr(t)作为偏差的积分[6],当偏差的积分趋近于常数时,则说明飞行器在逼近目标物,达到跟踪目的,对应的二次性能指标为

控制系统的输入由状态反馈算法得到

其中P为下列里卡蒂代数方程式的解

设计出的最优状态调节器结构图如图3。
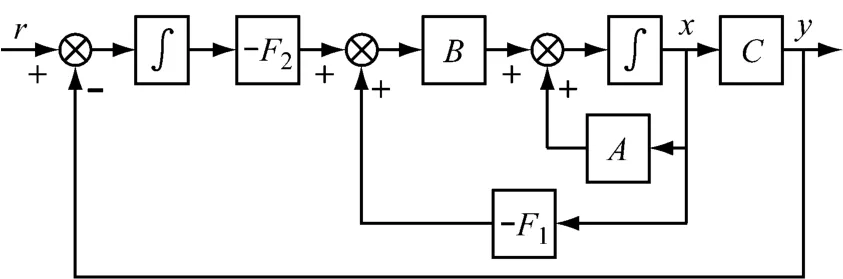
图3 LQI控制器
2.2 卡尔曼滤波器设计
在飞机飞行过程中会受到各种过程噪声和观测噪声的干扰,使无法准确测得各个状态变量。为解决上述问题引入Kalman滤波器,Kalman滤波器能够在估计这个未知的状态变量的同时进行滤波,减小噪声对飞行品质的影响。
卡尔曼滤波器以系统的输入输出作为滤波器的输入,对原系统的状态变量X进行估计,其表达式为


其中P满足代数里卡蒂方程

至此,便可估计出对象的中间状态量即角度、角速度和角加速度。
2.3 回路传输恢复
至此,已设计出线性二次最优控制器和卡尔曼滤波器,根据分离原理将两者结合,即为线性二次高斯(LQG)控制器。组合后其结构方框图如图4。
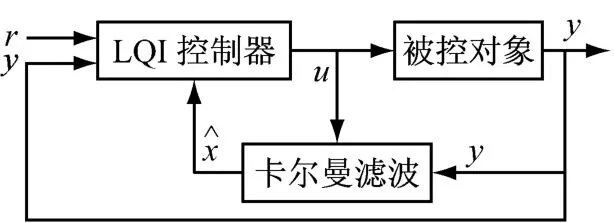
图4 控制系统整体框图
对于原系统,因为状态反馈的引入可以达到很好的跟踪性能,但同时会使整个系统的稳定性变差,为此引入输出端传输回路恢复技术(LTR),以获得良好的动态性能和鲁棒性。
通过理论推导和实验结果,选择
3 实验结果及其分析
在飞行过程中,飞行器会受到诸如风力的干扰以及传感器的漂移,因此对控制器的抗噪性能和卡尔曼滤波器的滤波和状态估计的效果进行分析。
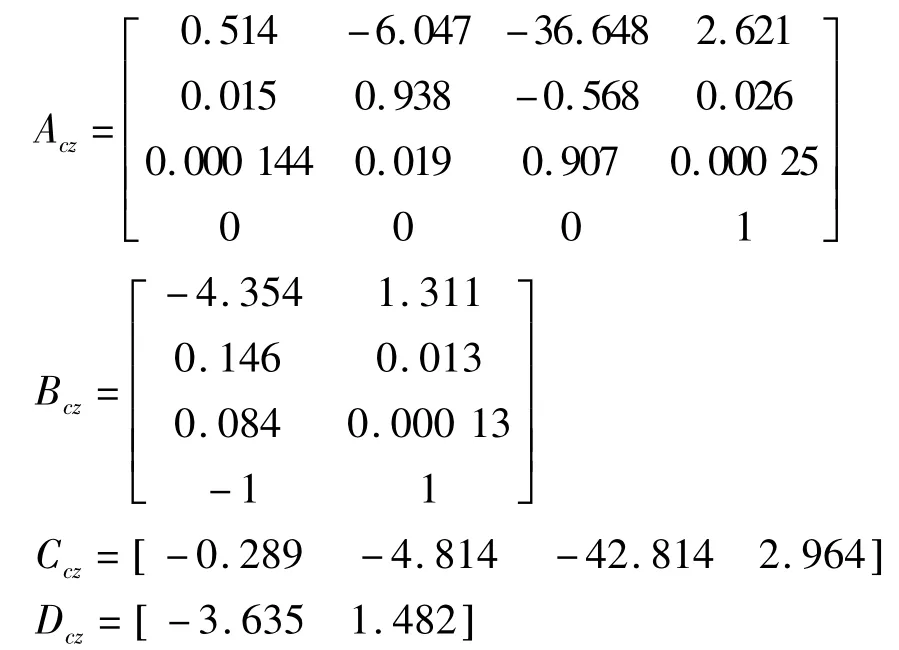
为了验证设计的控制器的性能及仿真结果的正确性,将四旋翼无人机作为被控对象进行装机实验,通过实际的飞行来检验其控制效果。将上述系统离散化,最终安装在飞行器主控板上的姿态控制器的参数如下:
从实验结果图5可以观察到所设计的LQG控制器可以很好地跟踪控制输入信号的波动,无论是低频还是高频都具有良好的控制效果。跟踪结果存在约±3°的偏差,这是因外界存在干扰或是传感器的漂移,是不可避免的。因此本文的姿态控制器能够实现四旋翼无人机稳定的姿态控制,采用LQG方法设计姿态控制器是切实可行的。
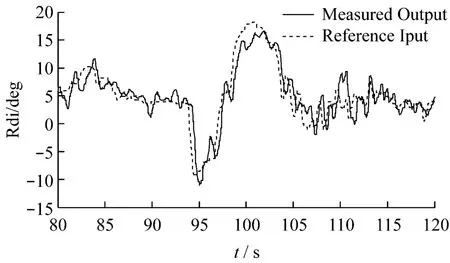
图5 控制器输出与参考输入比较图
4 结束语
本文首先介绍了四旋翼飞行器的整体硬件构成和主要飞行控制技术,然后针对飞机的飞行控制对姿态角模型进行线性建模并以此为基础设计了姿态角LQG控制器。仿真结果表明,所设计的LQG控制器具有很好的动态及静态性能,能快速稳定地跟踪输入信号,并具有一定的鲁棒性和抗噪性。所设计的卡尔曼滤波器可以很好地估计状态变量,并能起到滤波的效果。飞行器姿态飞行实验也表明了所设计控制器具有很好的控制效果。因此采用LQG技术设计姿态控制器是切实可行的。
[1]聂博文,马宏绪,王剑,等.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007(6):113-116.
[2]陈欣,杨一栋,张民.一种无人机姿态智能PID控制研究[J].南京航空航天大学学报,2003(6):611-615.
[3]周权,黄向华,朱理化.四旋翼微型飞行平台姿态稳定控制试验研究[J].传感器与微系统,2009(5):72-74.
[4]郑伟光.四旋翼无人机飞行姿态控制系统研究[D].长春:长春理工大学,2010.53-55.
[5]邓自立.卡尔曼滤波与维纳滤波:现代时间序列分析方法[M].哈尔滨:哈尔滨工业大学出版社,2001:207-208.
[6]付梦印,邓志红,张继伟.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003:45-46.
