温差能水下滑翔机实验水池温度梯度的理论验证与实验
2013-01-11,
,
(上海交通大学 海洋工程国家重点实验室,上海 200240)
水下温差能滑翔机的实验需要水域环境具有一定的温度梯度,一般在湖泊或沿海地区进行。但是湖泊或沿海地区沿水深的温度梯度的变化规律在某一时间段较为单一,如果需要多工况,需要不同的试验点或者实验时段,这就给水下温差能滑翔机实验带来了困难。因此,能模拟出具有可调节温度梯度的水域环境对研究水下温差能滑翔机具有重要意义。
1 水池所需温度梯度的理论分析
1.1 相变过程模型的建立
水下热滑翔机的相变材料储存在圆柱体的水平管中。相变材料在储能管中的两种主要状态见图1、2,即滑翔机下潜时的凝固过程与滑翔机上升时的融化过程。在温差能滑翔机航程中,圆管容器始终暴露在海水中,管内相变材料通过器壁与海水进行热交换,获取温差能[1-2]。
建立数学模型,对相变材料进行以下假设。
1)相变工质为纯物质,且各向同性。
2)相变工质的比热、潜热和密度等物理参数固相和液相之间不同,且不随温度和压力而变化。
3)相变材料性能稳定,无性能退化、过冷和过热等现象。
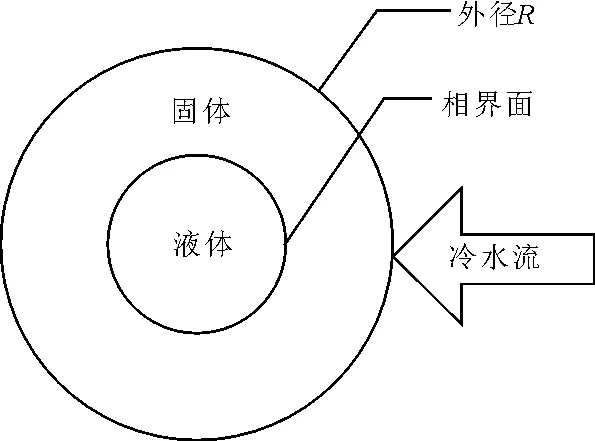
图1 相变材料凝固过程

图2 相变材料融化过程
4)热机管为细长圆管,忽略轴向和周向传热,只考虑径向传热问题。
5)容器热阻忽略不计。
相变传热能量方程采用焓法模型[3],它以比焓和温度作为变量,对求解区域建立统一的能量方程。一维圆柱体的能量方程为[4]
(1)
式中:t——时间;
r——径向坐标;
κ——相变材料的导热率;
θ——温度;
H——体积焓为相变材料的显热和潜热之和,可以通过式(2)计算[5]。
H=h+ρlflhm
(2)
式中:hm——相变材料的潜热;
ρ——相变材料的密度,下标l为液相;
h——显热。
(3)
式中:θm——相变温度;
c——相变材料的比热;
下标s、l——固相、液相;
fl——液相分数。
(4)
利用式(2)、(3),式(1)中的体积焓可以用显热和潜热来表示:
(5)
式中:a——热扩散系数。
融化过程的自然对流效应用等效导热系数κeq考虑,圆柱型封闭容器的等效导热系数为[6]
(6)
假设滑翔机初始处于水面,滑翔机内的相变材料和外界海水热平衡,当滑翔机运行时,相变材料与海水进行对流换热。故相变材料的边界条件为
(7)
(8)
式中:θw——水温;
hconv——对流换热系数;
R——圆柱体相变材料的半径。
1.2 相变过程的数值验证
典型的海洋温跃层温度为2~30 ℃[7-8]。按照实验水池的设计深度为2 m计算,温度梯度应在10~15 ℃/m范围内考虑。所以分别取tt为10.0、12.5、15.0 ℃/m进行计算,即水池的温度θw及深度z的函数关系式分别为
θw=30-10ztt=10.0 ℃/m
(9)
θw=30-12.5ztt=12.5 ℃/m
母猪在进入产房前必须进行消毒。消毒方法包括:冬季用温水以及夏季用冷水清洗猪体全身,然后用百毒杀或来苏儿对猪体进行消毒,要特别注意母猪的外阴以及乳房的消毒。在冬季约0.5 h猪被彻底晒干后,经消毒通道转移到产房。
(10)
θw=30-15ztt=15.0 ℃/m
(11)
根据水池温度变化范围,在几种常见的相变材料中比较后,选取正十六烷为滑翔机样机的相变材料。正十六烷的物理性质见表1。
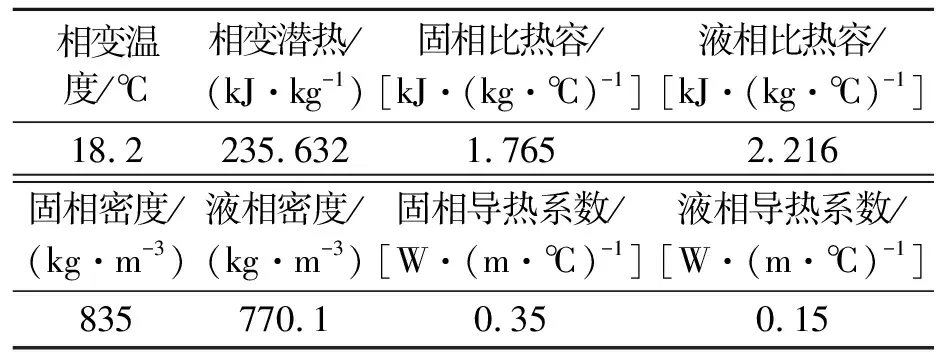
表1 正十六烷的物理性质
设计滑翔机最大体积变化量为350 mL。滑翔机动力装置储能管采用3根外置式的长圆柱管,其尺寸为直径0.03 m、长1.6 m。总传热面积0.45 m2,总体积为3 393 mL。滑翔机以0.05 m/s的垂直速度进行下潜与上升运动。
采用有限容积法进行相变模型的求解。首先进行计算区域的离散和微分方程的离散,见图3。
将式(5)在控制容积P及Δt时间间隔内对空间与时间作积分,把可积的部分积出后得

(12)

图3 计算区域径向离散
在同一控制容积中各处的h值都等于节点P上的值hP,选取一阶导数随时间作隐式阶跃式的变化,得
(13)

将上式整理成aPhP=aEhE+aWhW+S的简化形式。
aP=aE+aw+1;
为了计算方便,将aPhP=aEhE+aWhW+S改写为
aihi=bihi+1+cihi-1+di
(14)

根据上述的方法和参数,对式(5)进行求解。滑翔机设定的温度梯度下,深度、相变材料的体积液相分数、相变材料的体积变化率、相变材料的中心温度的变化规律见图4。
如图4所示,选取的3个温度梯度都能满足相变材料的固、液相变,产生体积变化,驱动滑翔机在水池下潜、上升的运动循环,都满足实验要求。理论上在满足相变材料固液相变温度上下限的温度梯度都满足,只不过在水池水面和池底停留的时间有差异。不同的温度梯度相变材料的相变过程随时间变化是不同的,从而要求滑翔机的姿态控制及内部热机阀门控制需要相应变化。因此具有稳定的温度梯度对于研究滑翔机工作性能非常重要。
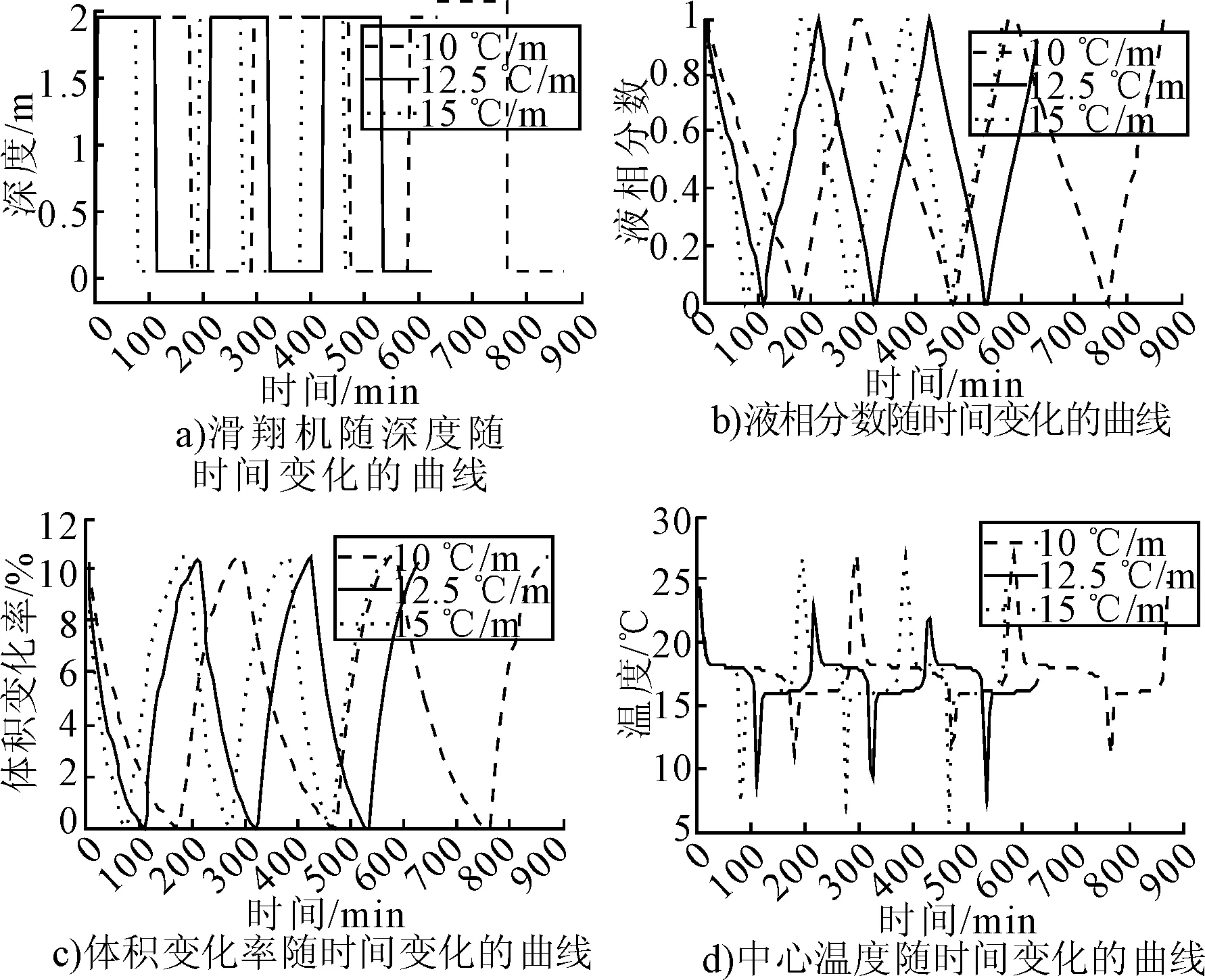
图4 滑翔机工作过程分析
为避免水池产生巨大的热应力,在相变材料可以完成相变循环前提下,应尽量采取小的温度梯度,因此选取10 ℃/m为试验水池的温度梯度控制目标。
2 水池系统的设计
试验水池原理见图5。该系统分为5模块,分别为水池主体,管路系统,制冷机组,数据采集单元及控制系统。
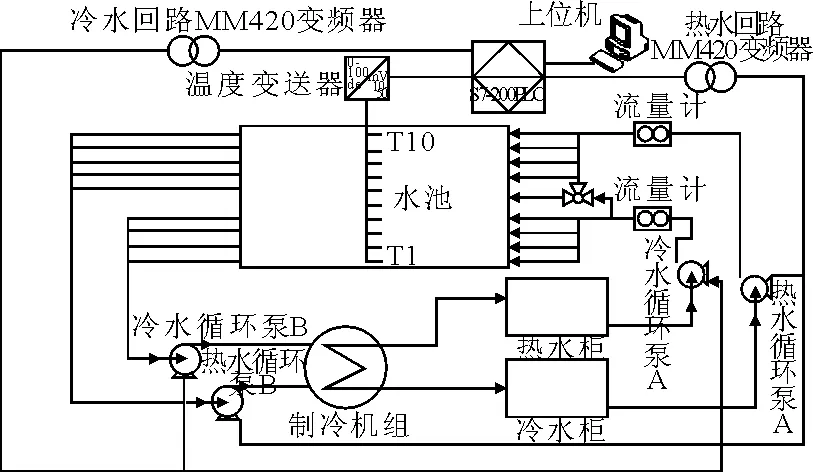
图5 水下滑翔机试验水池系统原理
2.1 水池主体
水池主体包括实验水池及冷水柜与热水柜,均由可透视的硬PVC板焊接而成。水池尺寸的长、宽、高分别为7.8、1.3、2.0 m。冷水柜与热水柜用来储存模拟海洋温跃层形成温度梯度所需的冷水与热水。水池是进行温差能水下滑翔机实验的主体区域,其右端是进水口,左端是出水口;水池的上部是流动的热水层,下部是流动的冷水层,这样就沿着水池高度方向产生了一定的温差。由于冷、热水流在水槽中存在一定的混合作用,导致热水温度下降,冷水温度上升。另外水池底部两侧等距离各装有5个24 W LED水下灯,方便观测试验进程与数据的采集。
2.2 管路系统
管路系统由硬塑管连接而成。分为冷水循环管路与热水循环管路,在水池冷、热进水管路上装有冷水循环泵A、热水循环泵A,它们将冷、热水从相应水柜泵入水池;水池出口的冷、热水管路装有冷水循环泵B、热水循环泵B,它们将混合的温水分别抽出,送至制冷机组系统冷却或加热至设定好的温度。在水池进水口中间有两排进水管装有三通阀,可以进行冷、热水的切换,从而改变水池温跃层的冷、热水域厚度,也能达到调节水池温度梯度的目的。
2.3 制冷机组
采用上海佳诺低温制冷设备厂制造的GLS-10制冷机,其出水负载水出水温度为0~10 ℃,循环水量为5 m3/h;冷凝水出水温度为30 ℃,循环水量为5 m3/h。
2.4 数据采集单元
水池需采集的数据为水池的温度梯度与冷、热水管的流量。水池中有一根可移动的硬塑管,上面等距离分布10个PT100温度探头,自下而上采集的温度分别为T1至T10,经温度变送器转换成4~20 mA的标准控制信号。流量可从水池冷、热进水管上的智能电磁流量计测得,该流量计同样可将流量信号转换成标准4~20 mA控制信号送入S7-200PLC。
2.5 控制系统
控制系统相当于整个试验水池的“大脑”,由西门子S-200PLC、MicroMaster420变频器与软件Step7/MicroWinSP6组成。数据采集单元采集的温度与流量信号经过PLC的CPU处理计算将输出信号输入至变频器,变频器接受信号后改变电流频率从而改变冷、热水泵的转速,达到调节水池温度梯度的目的。
3 控制策略
水下滑翔机实验水池温度与流量的控制是通过PLC接受温度变送器、流量计输出的标准控制信号,经CPU运算输出指令,最终由变频器与泵执行。整个控制路线形成一个闭环控制回路。
基于PLC的闭环控制系统组成见图6。图中虚线部分在PLC内,SPn、PVn、en、Mn分别为模拟量SP(t),PV(t),e(t),M(t)在第n次采样的数字量。
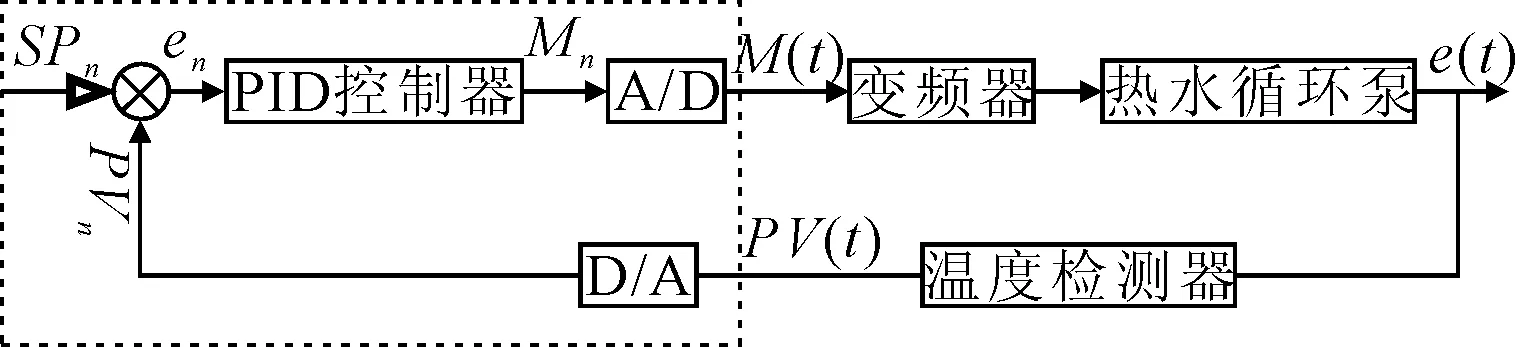
图6 闭环控制系统组成
PLC中PID控制器用于温度控制的经验参数为Kp=20~60%,Ti=180~600 s,Td=3~180 s。此外,S7-200PLC支持PID自整定功能,自整定算法向用户推荐增益值、积分时间值和微分时间值。经过多次调试,控制目标选取为T8-T4的差值,即SP(t)为T8-T4的设定值,PV(t)为t时刻T8-T4的测量值,能取得理想的数据,对应的自整定参数为Kp=0.2,Ti=10 min,Td=1 min。
4 实验及其结果
预先运行整个系统,循环水柜水温稳定在设定值后开始试验,其中制冷机组负载水出水温度设定为10 ℃,冷凝水出水温度设定为30 ℃。待整个水池表面温度大约是30 ℃,冷、热循环水箱里的水温为30 ℃和10 ℃时,启动PLC将程序下载至CPU并运行,同时开启Step7/MicroWinSP6程序状态监控。将装有PT100温度传感器的硬塑管分别垂直放于水池长度方向L/3、L/2、2L/3与L处(L为水池的长度)。在2L/3 处可以测得T8-T4的数字量差值约等于3 011(8 ℃的温差所对应数字量)。记录此处10个温度采集点的数字量,同时将变频器改为手动,所有循环水泵保持当前的转速,将硬塑管移至距离水池进口L/3、L/2与L处,记录下不同水域T1~T10的数字量,并计算得到相应的温度值,见表2。温度变化反应在图7中,分别对应L/3、L/2、2L/3与L处的测量值。

表2 温度采集点测得的温度 ℃
由图7可见,4处测量的温度变化都是10 ℃到30 ℃。其中测量值形成的曲线比控制目标线斜率大的部分,说明这些点之间的温度梯度大于10.0 ℃/m;比控制目标斜率小的部分,其温度梯度小于10.0 ℃/m。

图7 温度采集点温度分布
L/3与L/2处的温度梯度比控制目标大且温度相差比较大;而(2/3)L与1L处的温度梯度与控制目标最为接近,且温度值也相差不大,对相变材料相变过程的影响不会很大。因此这段区域都是符合要求的实验区域。
5 结论
1)水域的温度梯度直接影响水下温差能滑翔机的工作性能。对滑翔机相变材料的相变过程建立数学模型,对其进行数值求解,计算得出10.0、12.5、15.0 ℃/m都是满足相变材料的温度梯度。出于对水池结构产生尽可能小的热应力考虑,选择10.0 ℃/m作为实验水池温度梯度控制的目标。
2)完成整个实验室控制系统的搭建及控制参数的设定,运行整个系统可以得到比较理想的水池实验的环境,在水池的2L/3处到L处都有很好的温度梯度环境,可以实现滑翔机在下潜、上升时其相变材料完成凝固与融化过程。这段稳定的温差区域可为接下来研究滑翔机工作性能及路径的优化提供非常理想的实验环境。
[1] 王延辉,张宏伟,武建国.新型温差能驱动水下滑翔器系统设计[J].船舶工程,2009,31(3):51-54.
[2] 倪园芳,马 捷,王俊雄.水下滑翔机浮力系统的机理和调节性能[J].船海工程,2008,28(2):95-99.
[3] 张寅平,胡汉平.相变贮能——理论与应用[M].合肥:中国科学技术大学出版社,1996.
[4] VOLLER V R. Fast implicit finite-difference method for the analysis of phase change problems[J]. Numerical Heat Transfer, Part B, 1990,17(2):155-169.
[5] COSTA M, BUDDHI D, OLIVA A. Numerical simulation of a latent heat thermal energy storage system with enhanced heat conduction[J]. Energy Conversion and Management, 1998,39(3,4):319-330.
[6] ISACHENKO V P, OSIPOVA VA, SUKOMEL A S. Heat Transfer[M]. 3rd ed. Moscow: MIR Publisher, 1977.
[7] 周燕遐,张义钧,巴兰春.世界大洋冬夏季温度跃层特征[J].海洋通报,2002,21(1):16-22.
[8] 培 良,戚建华,方欣华.1997年11月南沙群岛调查海区的跃层特征[J].海洋湖沼通报,2000(1):1-7.