一种基于FPGA+DSP的北斗兼容型高精度接收机系统设计
2013-01-10蔡艳辉程鹏飞杨云春
蔡艳辉,胡 锐,程鹏飞,杨云春,王 权
(1.中国测绘科学研究院,北京 100830;2.北京耐威科技股份有限公司,北京 100029)
1 引言
全球卫星导航定位技术经历了20多年的发展,其应用已经深入到各国军事、安全、经济领域的方方面面,无论在中国还是全球,已经培育出了一个新型卫星导航产业。目前,我国卫星导航产业已经进入高速发展时期,预计2015年产值将超过2250亿元[1],成为国民经济重要的新增长点。
卫星导航应用主要分消费类和专业类,消费类主要是应用于车载或个人娱乐消费上,产品均以模块形式提供,功耗要求极低(几百毫瓦)、尺寸很小(2cm~3cm长宽),精度上要求并不高,一般10m左右。目前这类产品主要以国外的Ublox和SiRF占据垄断地位,国内厂家也在逐步推出自主产品;专业类主要应用于高精度导航、精密测量、对地观测等对精度要求较高领域,要求功耗低、体积小、集成度高、定位精度高,这方面国外品牌有Trimble、Leica和NovAtel等都拥有自己的核心技术。国内厂家基本上都没有自己的核心技术,产品也都是基于国外厂家的核心技术,属于产业的末端。
尽管中国北斗卫星导航系统(BDS)已经正式提供定位服务,并形成了亚太地区覆盖能力,但是目前还仍处于初步应用阶段。另一方面,BDS卫星导航电文还未完全公开,而目前能够兼容BDS的高精度接收机还不是很多。因此开发具有兼容BDS卫星信号的GNSS接收机系统极具战略意义。本文详细介绍了一种基于DSP+FPGA的模块化的低功耗、小体积BDS兼容接收机系统设计,在保证GNSS信号处理实时性的同时提高了系统的集成度、稳定性。
2 兼容型BDS高精度接收机系统组成
2.1 兼容型BDS高精度接收机整体框架
卫星导航定位接收机应用系统主要由天线、接收机主体及后续用户接口显示部分三大部分组成。天线接收卫星信号并将其从无线电微波转换成射频电信号(通常天线中还带有低噪声增益放大器),然后由接收机主体部分完成对射频信号的下变频、AD转换、基带信号处理、导航定位解算及高精度定位解算直至获得所要的载体高精度位置、速度和时间信息,最后通过串口、USB、网口等通信方式交给用户接口显示部分完成与用户的交互,具体组成形式如图1所示。

图1 高精度接收机系统组成示意图
高精度接收机系统中最终的部分即为GNSS接收机,它是整个系统的中枢,接收由天线送来的射频信号经滤波、增益放大、下变频、AD转换、信号解调解扩、导航解算、精密定位处理后通过通讯口送给下游的用户显示。目前市场上通用的GNSS接收机都只能接收GPS卫星信号,本文提出了一种具有兼容BDS卫星信号的GNSS接收机设计方案。
高精度GNSS接收机由RF射频前端、基带数字信号处理、输入输出接口、接收机控制、导航解算、精密定位六个模块组成。射频前端接收RF射频信号输入,然后进行下变频、滤波、增益控制,将高频输入信号转变为所需的中频信号;基带数字信号处理首先通过AD转换并进行采样,获得基带数字信号,经过各基带通道完成对各个卫星信号的解扩、解调,完成伪距、时间等原始观测信息的提取;输入输出接口负责整个接收机的数据流传递与交互;接收机控制负责协调监控各模块间的工作,保证系统的实时性、稳定性;导航定位解算对原始观测信息进行初步解算处理,为接收机提供初步的单点定位结果;精密定位则根据辅助观测信息或外部差分输入信息通过解算获得进一步获取高精度的定位结果。GNSS接收机各模块间的关系如图2所示。
2.2 RF射频前端设计
GNSS接收机采用的是星基无线电扩频调制通讯体制,由距离地球表面2万多公里的卫星天线发射,传播过程衰减加上路径上的其他干扰,到达地面功率只有-130dBm,深埋于热噪声电平之下(-110dBm),故只有经过增益放大和解扩处理后才能得到有用信号[3-4]。目前市场上有多家公司提供射频芯片,如Zalink公司的 GP2015[5-6]、美信公司的MAX2769等,但是这些芯片都只支持L1频率的下变频,而对于高精度接收机而言,需要同时能接收L2频率上的导航信号。本文采取了利用分离元器件自行设计的射频电路的方式来搭建高精度接收机射频前端,如图3所示。
在整个射频电路设计过程中要保证信号到达ADC模块时的功率保持在0dBm±1dB附近,故L1通道的增益需要保持在110dB左右,考虑到实际的电路设计以及工艺水平的影响,在总体增益设计时保持一定的冗余度,整个通道的整体增益为115dB。同理L2通道增益需要达到105dB。射频下变频到中频的信号经过AD采样后,变为基带数字信号供后续处理。
2.3 基带数字信号处理

图2 GNSS接收机模块组成框图
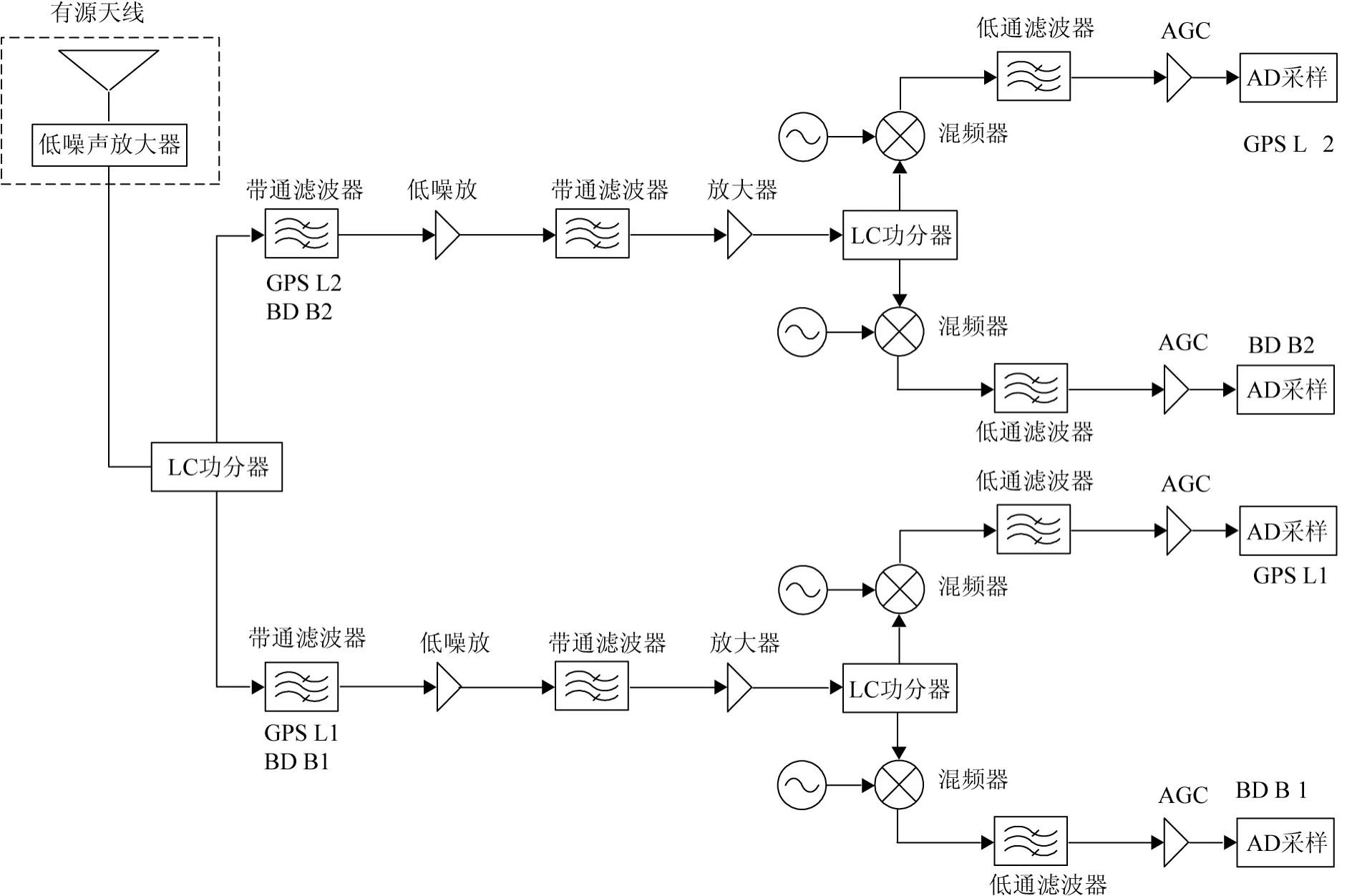
图3 BDS兼容型高精度接收机射频电路组成框图
基带数字信号处理是整个接收机的最核心部分,承担着承上启下的作用,它从基带数字信号中完成对调制信息解扩解调,提取出原始的观测数据,这些数据的精度质量好坏是接收机最终定位结果好坏的一个最大决定因素。为了兼容BDS信号,需要在原来跟踪GPS通道基础上进行扩容,以便建立更多的跟踪通道完成对BDS卫星信号的捕获与跟踪。而在信号解扩解调过程中需要大量的相关运算,为保证接收机的实时性,选用FPGA芯片搭建128个相关运算通道以保证基带最多能同时跟踪32颗卫星的全部信号。同时利用DSP形成基带环路的跟踪控制逻辑,并实现基带原始观测数据的提取。
在综合成本、功耗、体积、性能等诸多因素之后,选用Xilinx公司的Spartan 6EFPGA XC6SLX150来编程实现接收机的基带相关器通道,该款芯片拥有高达14万个逻辑单元,超大的容量保证了128个相关运算通道并行运算的可实现性实现的相关通道包括:载波数控晶振(NCO)、码NCO 码发生器、积分清零单元等核心单元以及相应的协调工作部分,每个通道都还有一个载波环路和一个码延迟环路[2]。基带数据在经过并行相关运算处理后得到同相(I)和正交(Q)支路两路相关数据,由TI公司的DSP TMS320C6747控制的基带环路来完成信号的捕获跟踪及原始观测数据提取,FPGA和DSP在基带部分的具体功能构成如图4所示。

图4 高精度接收机基带处理部分结构示意图
2.4 导航定位解算及高精度精密定位
接收机导航定位解算最大需要对128通道的数据进行处理运算,完成观测数据提取、星历校验和解码,以及位置、速度和时间等信息的实时解算。在对整个接收机所需要的运算量进行估算后,选择TI公司的高性能低功耗浮点系列DSP TMS320C6747作为处理单元,该型芯片最高能以456MHz主频工作,内含的8个功能单元使得每时钟周期能并行执行8条指令(其中6条为浮点指令),加上TI的独特超长处理VLIW(Very long instruction wide)技术,最高性能将达到3648 MIPS(Million instruction per second)/2736 MFLOPS(Million float instruction per second),片内还含有64个通用寄存器及两个可配置的32K缓存。因此所选的DSP芯片完全能够满足最多128通道基带原始观测数据提取和基本的导航定位解算。
为降低接收机功耗和体积,基于BDS/GPS的差分高精度精密定位解算也由C6747来完成,在差分模式下,接收机需要实时接收来自差分站的BDS/GPS差分数据,通过对本机的BDS/GPS伪距和载波相位观测误差进行修正,实现厘米级的高精度差分定位。
2.5 接收机控制及输入输出接口
接收机自身和数据流控制是关系到整个接收机是否能正常、稳定、可靠工作的关键,由于所选的DSP C6747芯片本身不仅具有强大的运算功能,还提供了丰富的外围接口。首先其拥有两个独立的外部存储器接口(EMIF),可以同时对两个存储器进行访问,即可以使用其中一路扩展SRAM使用,将另一路配置成高性能并行通信接收,这为实现实时高性能复杂GNSS导航定位算法提供了硬件条件,同时也解决了从FPGA中读取大量通道数据的问题;其次,该芯片还拥有3个Uart、2个SPI和2个I2C、3个 Mcasp,2个USB、1个网口、1个LCD控制和1个 MMC/SD控制等可复用功能,这些为处理器与其它器件的无缝连接提供了十分便利的条件,具体的使用如图5所示。
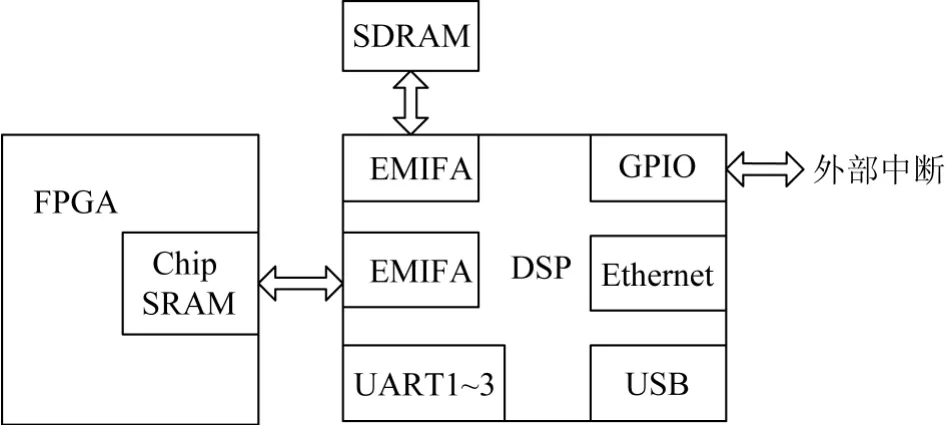
图5 DSP外围接口连接框图
通过这种架构使得所设计的高精度接收机可以胜任任一场合要求,在基本不损失处理能力的同时,自身的功耗和体积都得到很好的控制,这为接收机内部实现各模块间的有利控制提供了条件。
3 兼容型接收机整体调试
3.1 硬件制版和调试
根据接收机的前端射频、基带数字信号处理、导航定位解算及高精度精密定位、接收机控制和输入输出的设计,制板和芯片焊接后的兼容接收机板卡如图6。
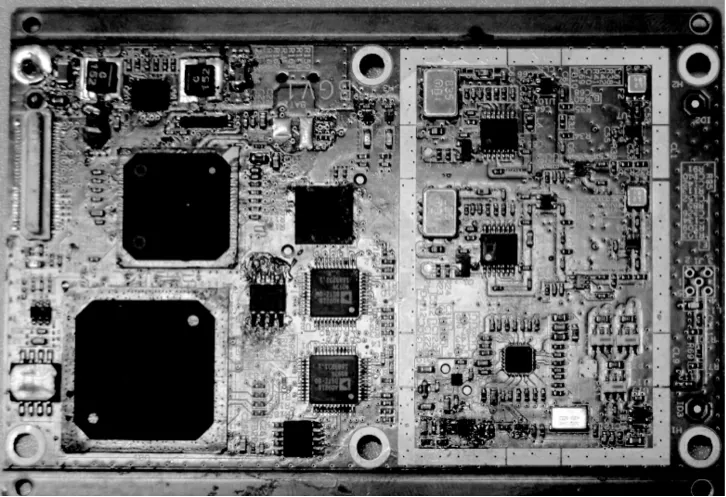
图6 兼容型GNSS接收机OEM板
接收机系统进行整体调试主要分为四部分:射频部分电路测试、基带数字部分测试、接收机控制及接口测试、导航定位解算及精密定位性能测试。射频部分的测试主要是确定温补晶振和模拟部分的变频电路是否工作正常,通过示波器、频谱仪对射频各阶段的输出进行测试,检测所产生的信号频谱是否符合实际的要求;基带数字部分测试通过编写相应的测试程序,主要测试相关器中寄存器和存储器的读写访问是否正常,并采样量化的数据查看噪声分布是否正常;接收机控制及接口则是检查硬件中断是否能够按照要求产生,输入输出接口操作时间是否能满足实时性指标要求。
3.2 载波相位数据观测质量
兼容型接收机支持GPS/BDS二代双频高精度伪距和载波相位观测,图7显示GPS L1/L2和BDS B1/B2载波相位定位后的残差序列。从图7可以看出,GPS L1的载波相位测量精度约为2mm,GPS L2的载波相位测量精度约为3.3mm,BDS B1的载波相位测量精度约为3.8mm,BDS B2载波相位的测量精度约为3.8mm。
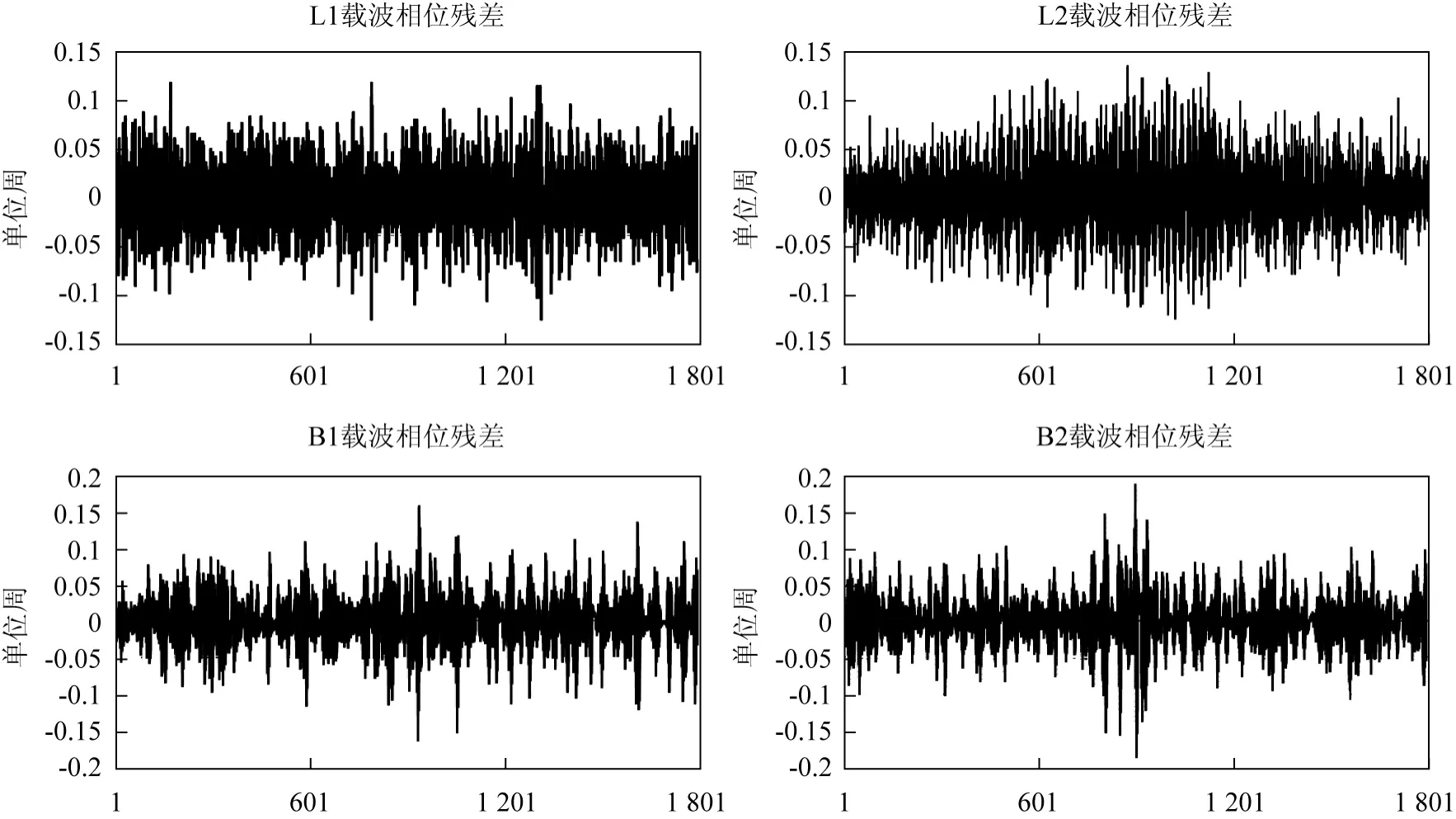
图7 兼容型GNSS接收机OEM板载波相位定位残差
3.3 RTK定位
为了测试BDS载波相位RTK的精度,选取了相距3km的两个点,一个设为基准站,一个设为流动站,采用兼容型接收机进行BDS载波相位实时差分定位(RTK),定位结果与已知点进行求差,时间序列如图8所示。从图8可以看出,X方向约为2cm,Y方向上约为5cm,Z方向约为4cm。投影到水平方向约为3cm,垂直方向约为6.5cm。
4 结束语
本文利用Xilinx FPGA和TI DSP作为接收机系统的主要处理芯片,配合自行设计的GPS+BDS四频接收机系统,经过测试整板卡功耗仅为3.5W,尺寸为100mm×60mm×20mm,具有体积小、功耗低的优点,测试的结果显示载波相位观测精度达到2mm,短基线RTK固定良好,定位精度达到厘米级,表明该兼容型接收机设计完全能够满足专业类GNSS高精度精密定位应用的需求。
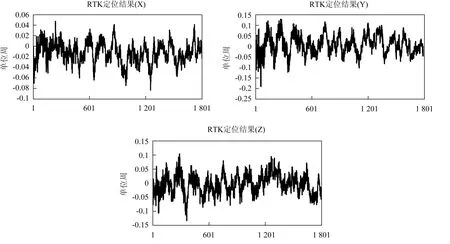
图8 兼容型GNSS接收机OEM板载北斗载波相位RTK定位结果
[1] 徐德明.中国地理信息产业发展报告[M].北京:社会科学文献出版社,2011.
[2] CHENG Peng-fei.Investigation on the Establishment of DGPS Services in China[D].Graz:The Technical University Graz Press,1998.
[3] 霍夫曼-韦伦霍夫B,利希特内格尔H,瓦斯勒E.全球卫星导航系统GPS,GLONASS,Galileo及其它系统[M].程鹏飞,蔡艳辉,文汉江,等译.北京:测绘出版社,2009:88-107.
[4] KAPLAN E.Understanding GPS:Principles and Applications[M].2nd ed.Norwood,MA:Artech House,2006:112-145.
[4] 王美玲,牛剑凯,刘 彤.一种应用于嵌入式领域的GPS接收机的硬件设计[J].中国惯性技术学报,2006,14(2):43-46.
[5] ZHENG S.Signal Acquisition and Tracking for a Software GPS Receiver[D].Virgina:Virgina Polytechnic Institute and State University,2005.
[6] 窦刚谊,梁向飞.一种高性能 GPS接收机的设计[J].科学技术与工程,2007,7(6):1150-1153.
[7] 李士兵,王美玲,刘 彤.基于 GP4020的 GPS接收机软件设计[J].中国惯性技术学报,2006,14(4):35-39.
[8] 戴水财,朱建军,张学庄,等.GPS接收机内噪声水平的评价与检测方法[J].测绘科学,2009,32(5):17-20.
