无线电经纬仪训练模拟器主控电路的设计与实现
2012-12-28孟明星郑喜凤
孟明星,郑喜凤,陈 宇
无线电经纬仪训练模拟器主控电路的设计与实现
孟明星1,2,郑喜凤1,陈 宇1
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院 研究生院, 北京 100039)
利用真实无线电经纬仪对气象操作员进行训练存在着成本高、效率低等诸多问题,研制相关训练模拟器是一种理想的解决方案。针对真实无线电经纬仪的系统组成特点和操作过程,提出了训练模拟器的仿真原理和主控电路的结构,重点分析了主控电路中各个功能模块的实现方法并给出了软件控制流程。调试结果验证了设计方案的可行性。
训练模拟器;无线电经纬仪;主控电路
无线电经纬仪是一种全自动高空气象探测仪,它和气象探测气球配合,通过对气象探测气球的跟踪,能够探测一定高度和水平距离空间内的气温、气压、湿度、风速、风向等气象信息[1]。气象探测气球上绑定有特定型号的探空仪,探空仪中装有温度、湿度、压力等传感器,它在探测过程中以一定的时间间隔将原始气象信息传给地面探空接收天线[2]。探空接收天线将接收到的原始气象信息送入探空信号接收机,进行放大、滤波、解码等处理,转换成有效的气象信息。最后探空信号接收机将处理后的气象信息送入上位机软件,由上位机软件输出直观的高空气象信息以供使用。无线电经纬仪和普遍使用的气象雷达探测系统相比,集成度更高,操作界面更直观,更适合于机动探测。
无线电经纬仪的操作流程复杂并且对操作员的操作顺序有严格的要求,因此需要对操作员进行大量严格的训练。但利用真实系统对操作员进行培训,存在着很多局限性:探空仪成本高,利用真实系统进行训练开销巨大;受外界环境因素影响大,难以对训练成绩进行客观的评价;一旦操作失误,整个操作过程可能无法继续进行,训练效率低。因此,研制一套操作现象、操作流程、数据参数界面与真实无线电经纬仪完全一致的训练模拟系统,是非常必要的。
1 无线电经纬仪
1.1 系统组成
无线电经纬仪系统主要由三部分组成:数据处理计算机,探空信号接收机和探空接收天线,如图1所示。

图1 无线电经纬仪系统组成框图Fig.1 Composition block diagram of radio theodolite
其中,数据处理计算机中的上位机软件用于探测前探空仪信息的录入,探测过程中气象信息的显示和相应气象图表的绘制,以及探测结束后气象报告的生成。
探空信号接收机除了内建的信号处理电路外,主要有6大功能模块组成。其中,显示模块由两组5位LED数码管组成,分别显示当前探空接收天线的方位角和俯仰角;信号发声仪(语音模块)在探测过程中播放探空信号电码声音,使操作员能识别所用探空仪类型(不同的探空仪发出的探空信号被接收后发出的电码声音是不同的);微安表用来指示当前探空信号的强度,当天线偏离探空气球较多时,微安表示数急剧下降,操作员根据微安表示数控制天线方向以跟踪气球;指示灯组用来指示无线电经纬仪各个模块的工作状态;开关组用来开/关无线电经纬仪的各个模块以及控制探测过程;天线控制模块用来改变探空天线的方位。
探空接收天线在天线控制按钮的控制下跟踪气球,并将探空仪发回的气象信息送入探空信号接收机中。
1.2 探测过程
在探测前,操作员需将所用探空仪参数以及地面的气温、气压、湿度等气象信息录入上位机软件,并完成探空信号接收机的开机操作。然后,将探空仪固定在氢气球上并进行探空天线初始状态的调整。探空天线初始状态调整正确后,将探空仪升空,开始探测过程。探空仪以一定的时间间隔发送当前所在高度的气象信息至探空接收天线。
探测过程中,操作员根据微安表示数来判断天线和气球的偏离程度,以调整天线方向跟踪气球。若由于一些突发原因,操作员未跟上气球,计算机上位机软件将停止显示气象信息,相应气象图表的绘制也将中断,操作员应在最短的时间内重新跟上气球,否则可能失去目标。对操作员的训练就是不仅要使其完全掌握操作流程,还要能够对突发状况进行及时正确的处理[2]。最后,当气球超过探空仪的极限探测高度后,操作员应结束探测,并输出气象探测结果。
2 训练模拟器设计原理
训练模拟器的外形必须和真实系统完全相同,并且模拟真实系统的全部操作现象和操作流程。其中,放球操作、探空天线的初始化和探测中控制由上位机软件和主控电路联合模拟完成。因此,训练模拟器和真实系统相比,少了探空接收天线的部分,如图2所示。
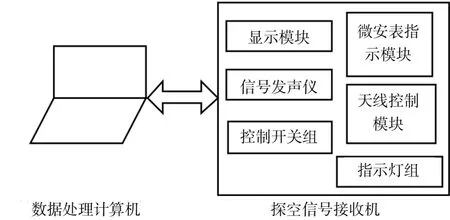
图2 训练模拟器组成框图Fig.2 Composition block diagram of training simulator
在训练模拟器中,气象探测信息由预置在上位机软件中的数据库提供,送入探空信号接收机中按规定算法进行处理,然后送回计算机。因此,训练模拟器不需要重现探空信号接收机中的信号处理电路。同时,训练模拟器的硬件系统还监控操作员的操作流程,若操作员出现操作错误,主控电路会产生错误信息并送入上位机软件。上位机软件会给出错误提示并定量评价训练结果。
3 主控电路设计
训练模拟器主控电路主要模拟探空信号接收机的功能。考虑到对计算性能和控制性能的要求,采用DSP+CPLD的结构。其中, DSP作为核心控制器,主要完成气象信息的计算和对外围电路的控制,CPLD完成开关组信号的提取。主控电路的结构如图3所示。
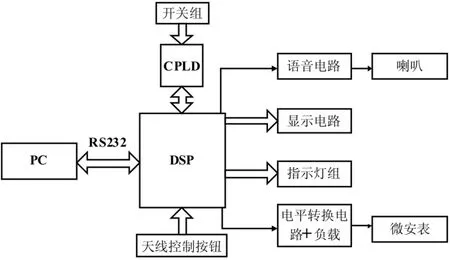
图3 主控电路结构Fig.3 Structure of main control circuit
3.1 主控芯片的选择
DSP选用TI公司的定点DSP芯片TMS320LF2407A 。LF2407A的指令执行速度为40MIPS[3],能够满足模拟器实时处理气象数据的要求。同时,LF2407A外设资源丰富,两个事件管理器(EV)每个包含2个16位通用定时器、3个比较单元、3个定时捕获单元,此外还具有串行外设接口(SPI)、串行通信接口(SCI)、CAN2.0B模块、41个可单独编程或复用的通用I/O接口、五个外部中断等[3]。这些片上资源能够帮助模拟器快速、方便地完成对各个功能模块的控制任务。
CPLD采用Altera公司MAX II系列芯片中的EPM240T100C5。该芯片具有功耗低、延时小等特点[4]。在训练模拟器主控电路中,CPLD主要完成I/O扩展的功能,该芯片足以满足要求。
3.2 显示模块的实现
显示模块用来控制两组5位LED数码管的显示,为减小电路规模,每组5位数码管可由一个四位一体数码管和一个一位数码管代替。DSP的SPI模块将显示数据(包括四位一体数码管的选通信号)串行输出至74HC595芯片组,由74HC595芯片组并行输出后送入数码管显示,如图4所示:

图4 显示模块实现框图Fig.4 Block diagram of display module
74HC595芯片是一种8位串行输入/输出或者并行输出的移位寄存器,其串行移位和并行输出需要不同的时钟信号。在74HC595芯片组中,前一个74HC595芯片的串行输出接下一个的串行输入,各个芯片共用串行移位时钟、并行输出时钟及并行输出使能信号。SPI模块的SPISIMO引脚串行输出显示数据,SPICLK引脚提供74HC595芯片组的串行移位时钟。另外,DSP的两个I/O引脚输出LACK和OE信号,分别作为74HC595芯片组的并行输出时钟和并行输出使能信号。在一组完整的显示数据串行移入74HC595芯片组后,LACK引脚输出一个高电平脉冲,显示数据并行输出并送至数码管显示。整个显示模块的控制可在定时器周期中断服务程序中完成[5],以保证数码管组不间断的显示天线方位。
3.3 微安表模块的实现
微安表模块根据当前探空信号强度输出相应的电流至微安表。其中探空信号强度由DSP根据从上位机软件接收到的气象数据真值和显示模块指示的当前探空天线方位,按照规定的算法计算得到,它与电流值成正比。在具体实现时,DSP比较单元输出宽度与探空信号强度成线性关系的PWM脉冲,送至电平转换电路。电平转换电路输出幅值与PWM脉冲宽度成线性关系的直流电压信号,通过负载后便可输出适当的电流至微安表。微安表模块的结构如图5所示。

图5 微安表模块实现框图Fig.5 Block diagram of micro-ammeter module
其中,探空信号强度和PWM脉冲宽度的线性关系是通过对PWM脉冲宽度、输出电流值的采样,由最小二乘法拟合得出。电平转换电路主要有三部分组成:积分电路、包络检波器和电压跟随器[6],其输出不是纯粹的直流分量,而是带有一定的纹波。负载除了阻值适当的电阻外,还包括一个整流二极管,以减少纹波。
3.4 语音模块的实现
模拟器的语音电路采用语音录放芯片加上功放芯片的实现方案。其中语音录放芯片采用ISD1760,其独立按键工作模式即可满足要求。ISD1760的两个喇叭输出信号SP+、SP-经过放大、滤波电路后送入功放芯片。功放芯片采用TI公司的TPA1517,它能持续提供平均5~6W输出功率。TPA1517输出的音频信号直接送至喇叭输出。在实际使用时,先利用麦克电路将需要播放的探空仪电码声音录入ISD1760,然后由DSP输出播放控制信号。
3.5 开关组模块的实现
在模拟器中,开关组采用机械开关连接信号线的方案实现。由于开关数量众多,采用一片CPLD对DSP进行IO扩展,由CPLD完成对开关组状态的提取,然后送入DSP中。开关组信号线由5V电源上拉,经8总线双向三态缓冲器74LVC4245芯片后,接至CPLD引脚。CPLD和DSP主要通过两组I/O引脚相连,以引脚的高低电平状态来分别传递提取码和开关状态。其结构框图如图6所示。
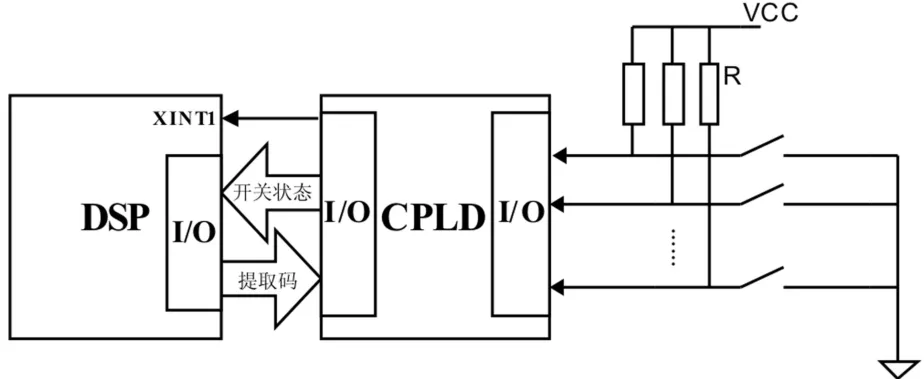
图6 开关组模块实现框图Fig.6 Block diagram of switching group module
在时钟信号的驱动下,CPLD主控逻辑不断检测开关组信号状态。若检测到有开关状态发生变化,CPLD首先执行延时消抖操作,然后重新检测开关组状态。确认开关组状态发生变化后,CPLD向DSP的XINT1引脚输出10个CLKOUT周期的低电平,以触发DSP的外部引脚中断[7]。
由于开关数量众多而DSP的I/O引脚有限,CPLD不能一次性地将全部开关状态都送入DSP中,因此,开关状态的传送采用分组传递的方式实现。在DSP的外部引脚中断服务程序中,DSP向CPLD传送提取码,CPLD根据提取码传送相应组别的开关状态至DSP,直至所有开关状态传送完毕。在中断服务程序中,DSP除了完成开关状态的提取,还需判断是哪些开关的状态发生了变化并执行相应处理。
3.6 其他功能模块的实现
模拟器指示灯组由DSP的I/O引脚直接控制。对于显示状态独立的单个LED灯,控制信号经74LVC4245芯片后直接送至LED灯;对于显示状态一致的一组LED灯,控制信号经74LVC4245芯片后送至一个三极管开关电路,由三极管开关电路驱动并联LED灯组(大电流负载)。
天线控制模块用来调节探空天线的方位,有“上”、“下”、“左”、“右”4个按钮。这4个按钮的外部电路和开关组相同,但由于其功能的特殊性,将其信号线直接接至DSP的I/O引脚。在主程序中,DSP循环检测并记录这四个按钮的状态。在定时器周期中断服务程序中,根据各个按钮的当前状态,程序按照规定的角速度调整当前探空天线的方位值并送显示[8]。
最后,在模拟器中,计算机和DSP采用RS-232标准的通用异步串口(UART)进行通信。DSP的SCI模块通过一片MAX232芯片与计算机串口相连。SCI模块采用全双工通信,波特率为9600Baud。
4 软件控制流程
在CCS3.3平台下,利用C语言进行控制程序的开发,其软件控制流程如图7所示。
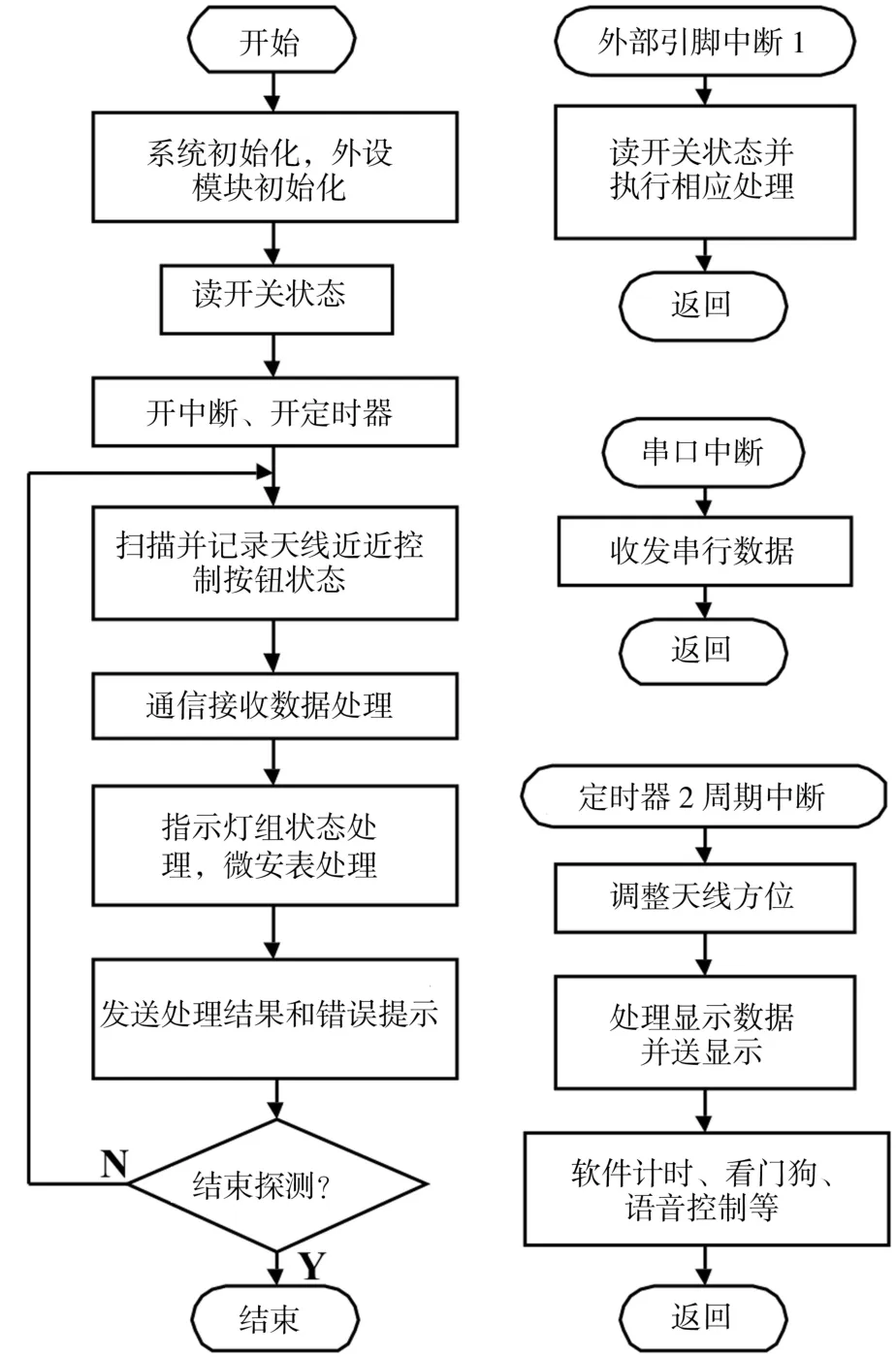
图7 软件控制流程Fig.7 Process of software control
DSP上电后,首先进行系统的初始化和外设模块的初始化,然后第一次读取开关组各个开关的状态,以获得开关状态的初始值。在打开中断和定时器后,DSP循环执行以下操作:读取并记录天线控制按钮的状态;接收计算机传来的控制信息和气象数据,进行相应处理后,得到状态指示灯的亮暗信息、探空信号强度并送显示,将气象数据处理结果和操作员的一些操作错误信息发送给计算机。在外部引脚中断中,DSP读取开关组状态并进行处理,得到相关指示灯的亮暗信息和操作错误信息;串口中断完成串行数据的收发;在定时器周期中断中,DSP根据规定的角速度调节天线方位并送显示模块显示,同时完成软件计时、语音控制和看门狗等操作。
5 结束语
按照上述方案设计的系统样机,通过对主控电路各个功能模块的分步调试以及和上位机软件的联合调试,其预期功能全部得到实现,从而验证了设计方案的可行性。目前,无线电经纬仪训练模拟器已投入实际使用,并取得了良好的训练效果。
[1] 张心心,高亚楠.气象探测模拟器控制系统设计[J].绵阳师范学院学报,2008(5):31-35.
[2] 张学全.气象雷达模拟训练器主控系统的设计与实现[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所), 2005.
[3] 江思敏.TMS320LF240x DSP硬件开发教程[M].北京:机械工业出版社,2003:4-49.
[4] MAX II Device Family Data Sheet[M].California: Altera Corporation,2009.
[5] 刘和平,王维俊.TMS320LF240x DSP C语言开发应用[M].北京:北京航空航天大学出版社,2002:265-272.
[6] 康光华,陈大钦.电子技术基础模拟部分(第四版)[M].北京:高等教育出社,1999:329-371.
[7] 曹 晖.TMS320LF2407中断系统分析及C语言编程[J].新余高专学报 ,2005,(4):76-79.
[8] 华风雷.基于TMS320LF2407芯片的天线跟踪控制设计[J].遥感技术与应用,2007(3): 417-421.
Design and implementation of control circuit in radio theodolite training simulator
MENG Ming-xing1,2, ZHENG Xi-feng1, CHEN Yu1
(1.Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, Jilin, China;2.Graduate School of Chinese Academy of Sciences, Beijing 100039, China)
An efficient and economical way to train operators of radio theodolite is to take advantage of relative simulators.A design of radio theodolite simulator was provided.At first the construction and the operation process of radio theodolite were introduced.Then the design principle of the simulator and the construction of its control circuit were given.At last each module of the control circuit was described in detail and the software control procedure was also given.The test results show that the design scheme is viable.
training simulator;radio theodolite;control circuit
P204; PM93
A
1673-923X (2012)03-0198-05
2011-11-01
孟明星(1987—),男,河南孟州人,硕士研究生,主要研究方向:嵌入式技术应用等;E-mail:mengmingxing@sina.cn
[本文编校:邱德勇]
