双曲肘合模机构优化CAD系统设计性能研究
2012-12-04杨于光
赵 俊,杨于光
(北京化工大学机电工程学院,北京100029)
双曲肘合模机构优化CAD系统设计性能研究
赵 俊,杨于光
(北京化工大学机电工程学院,北京100029)
根据建立的双曲肘合模机构的设计流程开发出用于双曲肘合模机构优化设计的计算机辅助设计(CAD)系统,着重研究了该系统的设计性能。通过对优化设计系统所设计的设备进行运动学仿真及变形模拟分析,验证了设计结果的合理性。通过与现有相同规格注塑机合模机构的对比实验,表明该设计系统设计的设备结构合理、性能良好;该CAD系统能够高效地优化并设计出不同系列规格的合模机构。
注塑机;双曲肘合模机构;计算机辅助设计系统;优化设计
0 前言
双曲肘式合模机构由于其良好的结构和运动特性成为注塑机中应用最为广泛的一种合模机构型式[1]。但双曲肘合模机构的力学方程、运动学方程及变形方程都较复杂,使设计人员承担着繁重的计算任务,同时参数和结构优化设计结果的建模及仿真也占据着较长的工作时间。为缩短设计周期,提高设计效率,本文通过对双曲肘合模机构的研究建立了双曲肘合模机构的设计流程。据此流程开发出五支点双曲肘合模机构的优化CAD系统,并对其设计结果进行运动学仿真、变形模拟及对比实验。
1 双曲肘合模机构优化CAD系统简介
1.1 系统设计流程
注塑机合模机构设计的一般设计过程包括确定机型、参数设计、参数结构化及参数校核[2-3]。双曲肘合模机构的参数设计,根据其特点可以分为肘杆参数的最优化设计及其余结构参数的设计,具体设计流程如图1所示。
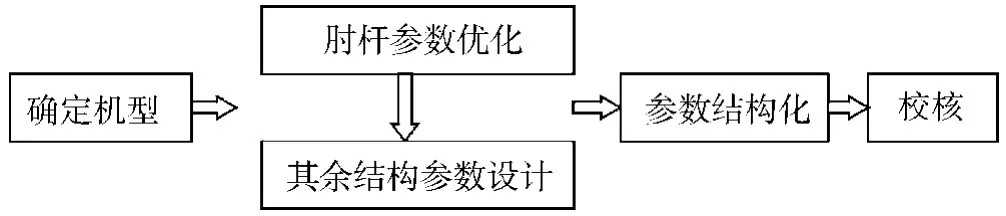
图1 合模机构的设计方案Fig.1 Design scheme of clamping unit
图1所示的肘杆参数优化部分一直是合模机构设计计算最为复杂的部分,需选择合适的数学算法对肘杆机构数学模型进行最优化计算[4]。为提高设计效率,本文总结出一套较为有效的计算方法,得到了不同系列合模力范围内的肘杆最优化参数,并将这些参数储存于系统中供用户调用。
1.2 系统功能
该优化设计系统的工作过程分为机构参数设计及三维建模两部分。机构参数设计部分的运行过程如图1所示。用户在确定机型后输入设计条件,系统根据设计依据选择储存于内存中的肘杆优化参数。确定肘杆参数后,选择主要承力部件的材料,通过控制拉杆允许变形量,分配拉杆与肘杆刚度,在相互制约的参数关系中高效地找出各结构的最优尺寸参数设置。各尺寸参数在经过结构化并校核无误后便可进入三维建模部分,此时系统根据得到的设计结果一键生成各部件的三维零件模型及组件(装配)模型。之后,便可对生成的模型进行运动学仿真或利用与计算机辅助工程(CAE)软件的无缝链接技术对主要关键零件做静态结构分析。
系统主计算界面和三维建模界面分别如图2(a)和(b)所示。
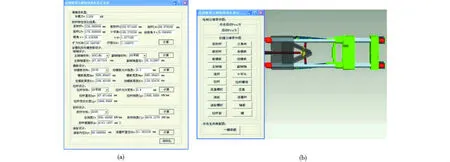
图2 合模机构CAD系统工作界面Fig.2 Work interface of CAD system for clamping unit
2 系统设计结果验证
2.1 设计结果
为验证优化设计系统的合理性,采用该系统设计1200kN合模力及6000kN合模力的合模机构各一台,分别命名为1#机与2#机,其肘杆参数设计结果如表1所示,拉杆及模板参数如表2所示。

表1 肘杆机构设计参数Tab.1 Design parameters of the toggle mechanism

表2 合模机构设计参数Tab.2 Design parameters of clamping unit
2.2 运动学仿真
利用Pro/Engineer对系统生成的组件进行运动学仿真。为真实反映合模机构的运动状况,在Pro/Engineer的驱动电动机中施加分段初速度:先匀加速至最大速度再以匀速运动。在活塞杆及动模板上各取一点测量各点位移及速度曲线,动模板行程仿真结果如图3所示。
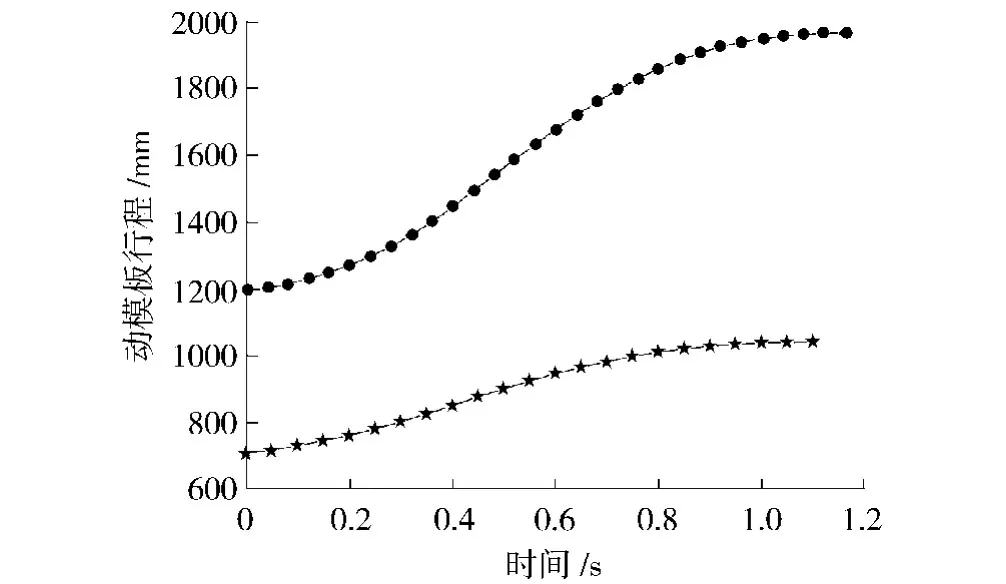
图3 动模板行程曲线Fig.3 Stroke curves for dynamic template
根据图3所示曲线计算可得1#机与2#机的移模行程分别为342.13mm与767.99mm,以相同方式测出活塞杆行程,得到1#机与2#机行程比分别为1.15和1.02。对比表1中的设计结果,误差均在5%以内,并且均达到注塑机标准中所规定的数值。根据图4所示的速度变化曲线可以看出,两设备的移模速度均符合“慢—快—慢”变化特点,且在加速段动模板速度与活塞杆速度之比大于1,能够在保证安全合模的要求下获得更快的移模速度,提高生产效率。因此,系统所设计的1#及2#设备符合运动学方面的需求,设计合理。
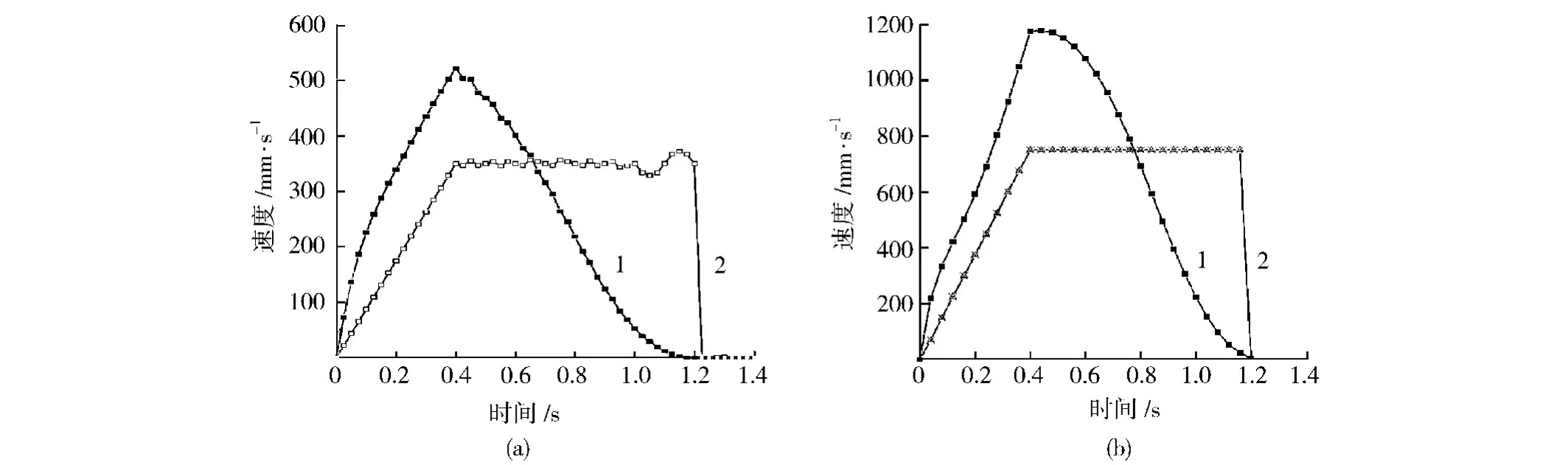
图4 速度曲线图Fig.4 Curves for the velocity
2.3 动模板变形分析
该系统依据用户指定的最大允许挠度设计出动模板厚度,因此需要检验设计结果是否符合许用最大挠度。利用无缝链接技术将系统生成的动模板三维图导入ANSYS Workbench中,根据动模板实际受力情况,在支座受力处施加固定载荷,在模具接触面处施加固定约束。完成各属性定义及网格划分后,计算得到图5所示云图。

图5 动模板变形云图Fig.5 Deformation diagram for dynamic template
图5所示为动模板Z向最大变形,因其默认正向变形为最大,而动模板实际变形是沿Z轴负方向,因此其Z正向的最小变形为动模板Z负向的最大变形。从图5可以看出,板体的在Z负方向的变形均小于许用值,说明本系统对于动模板厚度参数的设计是合理的。动模板支座处的最大变形虽然均略大于许用挠度,但并无超出强度要求且支座的变形对模板与模具安装平面度并无影响。
3 合模机构对比实验
3.1 实验方案
为研究本系统设计结果与现有1200kN注塑机合模机构(A机)对比是否具有性能的提升,需要测试注塑机合模机构的性能,并对比本系统所设计的合模机构在相同条件下的性能作对比。实验方案包括:(1)测量A机的结构参数,计算其性能参数,并与系统设计的1#机性能参数作比较;(2)测量A机合模机构在不同油缸压力作用下的应变量及实际油缸压力,分析处理测量数据,求出应变值从而求出其合模力及油缸推力;(3)计算与A机合模机构达到相同合模力时1#合模机构所需的油缸推力,对照实测油缸推力曲线,作合模过程中所需油缸推力的对比。
3.2 力学性能对比
测量A机的结构参数,计算其性能参数。A机与1#机性能参数对比如表3所示。表3中1#机的性能参数是该CAD系统对初始优化参数圆整后的新数据,从数据可以看出,系统设计的1#机在肘杆总长方面略有增长,移模行程与A机为同一水平,但行程比及力的放大比都有提升。其中放大比曲线对比如图6所示。根据图6所示对比曲线可以看出,1#机在各时刻的增力性能都大于A机合模机构。说明肘杆优化参数良好。

表3 合模机构性能对照表Tab.3 Performance comparison of the clamping units
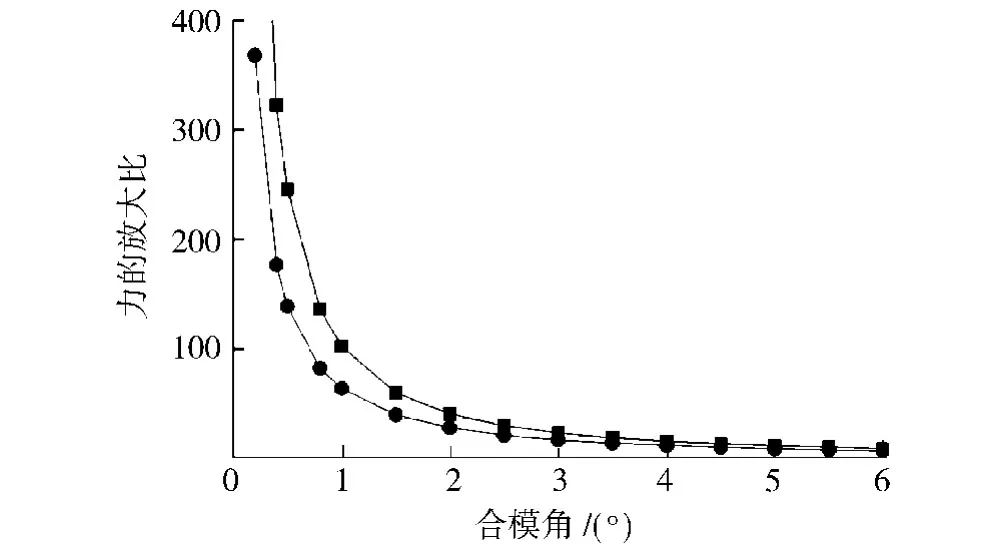
图6 力的放大比曲线Fig.6 Curves for amplification ratio of force
3.3 油缸推力对比实验
3.3.1 实验设备
实验设备为现有A机合模机构;感应设备为中航工业电测仪器股份有限公司生产的BX120-5AA型电阻应变片;信号采集设备为美国国家仪器公司生产的数据采集板卡。
3.3.2 实验平台
将电阻应变片贴于图7所示的测点位置,将应变片引线与屏蔽线连接组成半桥电路。

图7 应变测点位置Fig.7 Measuring point of strain
3.3.3 测量结果
依照不同设定下的油缸压力,分四点测量合模力及油缸压力随时间的变化曲线。利用数据板卡每间隔10ms采集一次信号,将得到的电压数据经过计算得到各设定油缸压力下拉杆的最大应变值及最大机构变形力,实验及计算结果如表4所示。
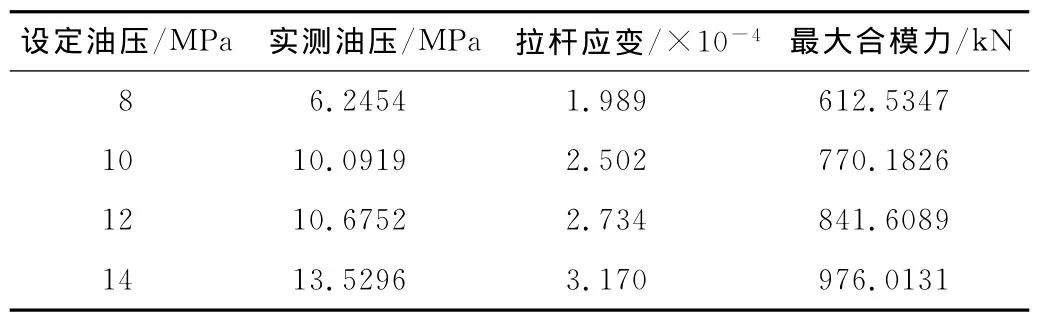
表4 实验数据Tab.4 Experimental data
表4中数据绘制1#机与A机合模机构达到相同合模力所需的油缸推力曲线,对比实验测得曲线如图8所示。
图8(a)、(c)、(e)、(g)为 A合模机构实测合模力及油缸推力,图8(b)、(d)、(f)、(h)为1#机在相应最大合模力时的机构变形力(Pc)-α、合模力(Pm)-α、油缸推力(Po)-α曲线。1#机的Pc-α曲线说明,在各点处1#机与A机达到了相同的最大机构变形力;各点的Pm-α曲线均在Pc-α曲线上方,说明1#机达到合模机构正常工作的条件,能够正常工作;1#机在各点处的Po-α曲线的峰值均低于A机合模机构的实测油缸推力的峰值,从对比结果可以定性地看出,在各设定条件下,1#机在与A机合模机构达到相同最大合模力所需的油缸压力都更小,所需的能耗更低,因此,1#机比A机合模机构性能更为优越。定量数据如表5所示。

图8 机构特性对比曲线Fig.8 Characteristic curves for the clamping unit
根据表5所示油缸推力的定量对比结果可以看出,在达到各相同合模力情况下1#机所需的最大油缸推力都有不同程度的降低,节能率最高可达14.951%,节能效果可观,说明1#机的优化设计合理。

表5 A机与1#机油缸推力对比Tab.5 Comparison of cylinder force of machine A and 1#
3.3.4 实验误差分析
当机构确定后,可根据最大机构变形力计算出所需的最大油缸推力,通过该方式根据实测最大合模力计算理论所需油缸推力与实测油缸推力作比较可分析实验误差。误差率计算公式如式(1)所示。

式中 Δ——实验误差率,%
Pol——理论油缸推力,kN
Pos——实测油缸推力,kN
计算A机各实测合模力下所需最大理论油缸推力,与实测最大油缸推力一同代入式(1),计算得到实验误差率如表6所示。

表6 实验误差分析Tab.6 Analysis of the experimental error
从表6的实验误差率分析可以看出,实验所测最大油缸推力数值与所测最大合模力数值对应的理论最大油缸推力数值误差均在10%以内,实验结果较可靠。
通过对五支点合模机构优化设计系统性能的研究,在合模机构CAD系统的研究方面仍有一些问题有待更加深入的讨论:(1)对于肘杆机构的数学模型还需找到收敛效率更高的优化方法;(2)各零件参数化模型的结构变化较少,合模机构的参数化模型库还有待进一步丰富。以上两个方面将成为五支点双曲肘合模机构优化CAD系统今后研究的发展方向。
4 结论
(1)通过对现有机型的运动学仿真及动模板的变形分析,说明本优化设计系统所设计的结构可靠性较高;优化机型与现有机型的性能参数对比说明优化机型与现有机型拥有相同的移模行程,在行程比和力的放大比方面优于现有机型;
(2)通过与现有机型的对比实验,表明优化设计系统所设计的机型与拥有相同移模行程的现有机型在合模力分别达到612.54、770.18、841.61、976.01kN 时,所需的油缸推力分别减少4.45%、14.951%、6.46%、5.23%,使得1#机拥有更好的节能效果,说明该优化设计系统设计效果理想;
(3)通过对优化设计系统的使用以及对其设计结果的研究,表明该优化设计系统具有使用简单、设计效率高等特点,同时设计结果理想可靠。
[1] 王兴天.注塑工艺与设备[M].北京:化学工业出版社,2009:460-592.
[2] 张晋茂.注塑机械设计[M].北京:中国轻工业出版社,1999:360-413.
[3] 张友根.注塑机肘杆合模机构弹性力学性能探讨[J].橡塑技术与装备,2009,35(5):35-41.Zhang Yougen.The Toggle Clamping Mechanism of Injection Molding Machine Elastic Mechanical Properties[J].Plastics Technology and Equipment,2009,35(5):35-41.
[4] 秦光武,杨于光.引入摩擦后的注射机合模机构分析[J].中国塑料,2002,12(8):87-91.Qin Guangwu,Yang Yuguang.After Introducing Friction Clamping Mechanism of Injection Molding Machines[J].China Plastics,2002,12(8):87-91.
Design Performance of Optimized CAD System for Double-toggle Clamping Unit
ZHAO Jun,YANG Yuguang
(College of Mechanical Electrical Engineering,Beijing University of Chemical Technology,Beijing 100029,China)
Computer aid design(CAD)system based on the optimization design process of doubletoggle clamping unit was developed and its design performance was emphasized.Through the analysis of kinematics simulation and deformation simulation,the design result was verified rationality.By comparing with the existing same specifications mechanism through the experiment,the designed structure by the system was proven reasonable,and had good performance.All studies showed that the CAD system could optimize and design different series clamping unit efficiently.
injection molding machine;double-toggle clamping unit;computer aid design system;optimization design
TQ320.66+2
B
1001-9278(2012)07-0095-06
2012-04-10
联系人,zhaojun201@yahoo.com.cn