道路网交通流状态变化趋势判别方法
2012-12-03董春娇邵春福李慧轩
董春娇,邵春福,谢 坤,李慧轩
(1.田纳西大学 交通研究中心,田纳西 诺克斯维尔37996;2.北京交通大学 城市交通复杂系统理论与技术教育部重点实验室,北京100044)
交通流状态判别有多种方法,从简单的人工巡逻判别方法到紧急电话、移动电话判别方法,从闭路电视判别方法到全自动电子监视判别方法等等.这些方法都能够在一定程度、一定范围内发现道路上存在的交通拥堵状况.
最早开发并投入使用的交通流状态判别算法是以判别突发交通事件为主要功能的加利福尼亚算法.经过实践和进一步的深入研究,1978年Payne和Tignor[1]公布了10 种基于最初的加州算法的改进算法,其中性能最好的是加州7#算法和加州8#算法.1993 年Chassiakos和Stephanedes[2]开 发 了 一种低通滤波算法,采用移动平均的方法去除交通流参数实测数据中的噪声和高频成分,只保留低频数据实现对交通拥挤的判别.同年Abdulhai[3]建立了概率神经网络(PNN)对突发交通事件进行判别.同年Antoniades和Stephanedes[4]开发了一种单监测站交通事件判别算法(SSID),运用统计分析中的T检验方法分析单个监测站占有率数据差异实现对突发交通事件的判别.综上所述,早期的交通流状态判别算法主要以突发交通事件为研究对象,大部分都以感应线圈采集的交通流量、占有率和地点速度等交通流数据为基础,所采用的技术方法主要包括决策树、统计分析、平滑滤波等常规方法.经过近40年的发展,模糊理论、专家系统、模式识别、人工神经网络等人工智能技术已经成为交通流状态判别算法设计的重要手段,除了常规交通检测器能够提供的交通量、地点速度和占有率外,间接交通流状态判别算法设计的信息基础还包括车头时距、车辆的瞬时速度与行程时间、交通流的平均行程时间与平均行程速度等.交通流参数检测技术的发展为交通流状态判别算法有效性的提高创造了条件.
本文在交通流状态界定的基础上,采用模糊粒化的方法,将同时段道路网交通流状态参数映射为含有低边界值L、中值R和高边界值U三参数的模糊信息粒,并建立Elman网络模型对其变化趋势进行预测,基于预测结果,计算道路网交通流状态综合指数,将交通流状态划分为自由流状态、拥挤流状态和阻塞流状态,以期为不同状态下的交通流短时预测方法、控制及诱导策略提供技术支持.
1 交通流状态变化趋势预测方法
1.1 交通流状态
道路交通流特性可用交通流状态描述,交通流在不同状态下呈现出不同的特征.基于我国城市快速路交通流特性,结合基本图和三相交通流理论[5-6],可将交通流划分为自由流状态、拥挤流状态和阻塞流状态,如图1所示.图中,Qmax为交通流率最大值(即自由流状态下交通流率临界值),Omax为时间占有率最大值(即阻塞流状态下占有率临界值).

图1 城市快速路交通流状态划分Fig.1 Traffic flow states splitting on urban expressway
3种交通流状态下的交通特征为:①自由流状态——交通流率较小,道路上行驶的车辆基本上不受或少受其他车辆的影响,可以保持较高的车速;②拥挤流状态——车辆行驶速度受到前车的制约,但车流行驶状态比较稳定,且本身具有一定的抗干扰能力,该状态下交通流率可以达到最大值,当交通需求继续增加,会使车流产生较大的波动,车流运行速度出现显著下降,交通流呈现出很大的波动性;③阻塞流状态——交通流密度较大,速度受前车制约性强,车辆行驶自由度小,车速稳定性较差,显示出较大的波动性,当交通流率继续增加,车流会出现走走停停现象.
1.2 交通流状态变化趋势预测方法
交通流状态变化趋势预测是基于交通流参数实测值以预测交通流状态变化趋势和未来时段的交通流状态.本文基于模糊信息粒化的思想,将同一时段的道路网交通流参数映射为包含L,R,U三参数的模糊信息粒,建立Elman网络模型对三参数进行预测,判别未来时段交通流状态,其方法流程如图2所示.图中,Ofree,Ocong和Ojam分别为自由流、拥挤流和阻塞流状态下时间占有率临界值,K为道路网交通流状态综合指数.
2 交通流状态模糊信息粒化
2.1 模糊信息粒化方法
信息粒化(information granulation,IG)研究信息粒化的形成、表示、粗细、语义解释等,通过不可区分性、功能相近性、相似性、函数性等划分对象集合[7].模糊信息粒是以模糊集表示的信息粒,用模糊集方法对时间序列进行模糊信息粒化,主要分两个步骤:划分窗口和模糊化.划分窗口就是将时间序列分割成若干子序列,作为操作窗口;模糊化则是将产生的每一个窗口进行模糊化,生成一个个模糊集.这两种广义模式结合在一起就是模糊信息粒化,称为f-粒化.在f-粒化中,最为关键的是模糊化的过程,也就是在所给的窗口上建立一个合理的模糊集,使其能够取代原来窗口中的数据,本文采用派垂驰(W.Pedrycz)的粒化方法.
对于给定的时间序列,考虑单窗口问题,即把整个时序X看成是一个窗口进行模糊化.模糊化的任务是在X上建立一个模糊信息粒子P,即一个能够合理描述X的模糊概念G(以X为论域的模糊集合),确定了G也就确定了模糊信息粒子P


图2 交通流状态变化趋势判别方法流程Fig.2 Flow chart of traffic states variation identification
因此模糊化过程本质上就是确定一个函数A的过程,A是模糊概念G的隶属函数.通常粒化时首先确定模糊概念的基本形式,然后确定具体的隶属函数A.
本文建立模糊信息粒子的基本思想:①模糊信息粒子能够合理地代表原始数据;②模糊信息粒子要有一定的特殊性.为满足上述两个要求,找到两者的最佳平衡,可考虑建立如下关于A的一个函数:

其中,MA满足建立模糊信息粒子的基本思想①,NA满足建立模糊信息粒子的基本思想②.
常用的模糊信息粒子有:三角形、梯形、高斯形、抛物形等.其中三角形模糊信息粒子形式简单,且参数设置和交通流状态变化趋势具有相似性.本文采用三角形模糊信息粒子作为描述同一时段道路网交通流状态,其隶属函数如下:
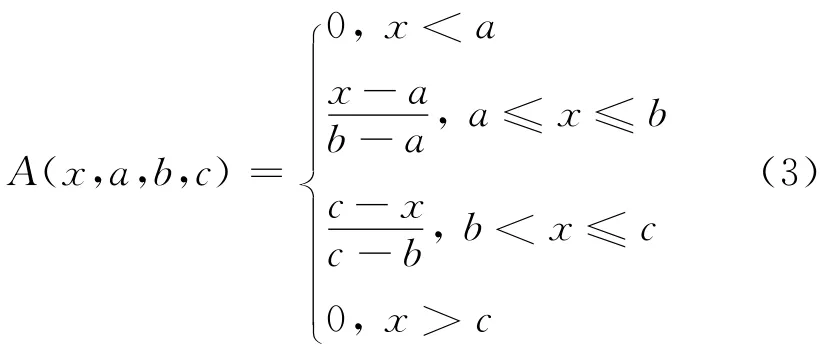
式中:A为隶属函数;a为三角形模糊信息粒子最小值;b为三角形模糊信息粒子中值;c为三角形模糊信息粒子最大值.
2.2 交通流状态模糊信息粒子计算
交通流状态是占有率的单值函数,因此以占有率为输入,判别交通流状态变化趋势.设研究范围内共有m个断面,则t时段共有o1,o2,…,om个值反映交通流状态,借助模糊信息粒化的思想,建立三角形模糊信息粒子模型,将同一时段的占有率映射为包含3个参数(U,R,L)的模糊信息粒子描述道路网交通流状态,具体步骤为:
步骤1 将同一时段的占有率o1,o2,…,om按从小到大重新排序,设排序后的时间序列为O=(o1,
步骤2 确定三角形模糊信息粒子参数R.
R反映的是道路网交通流状态变化的平均趋势,可按下式计算:

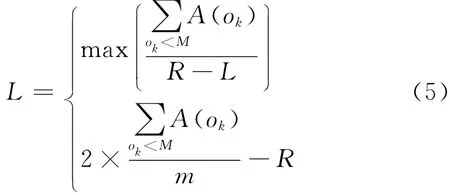
步骤3 确定三角形模糊信息粒子参数L.
L反映的是道路网交通流状态变化区间的最低值,其值既要小于R,又应具有独立性,计算公式为
步骤4 确定三角形模糊信息粒子参数U.
U反映的是道路网交通流状态变化区间的最高值,其值既要大于R,又应具有独立性,计算公式为

通过模糊信息粒子的计算,将反映道路网交通流状态变化的占有率时间序列转化为具有3个参数的状态区间,为交通流状态变化趋势判别提供输入参数.
3 基于模糊信息粒化的道路网交通流状态变化趋势判别
结合模糊信息粒化结果,建立Elman网络模型对三参数进行预测,判别交通流状态变化趋势.Elman网络是Elman于1990年提出的,该模型在前馈网络的隐含层中增加一个承接层,作为延时算子,以达到记忆的目的,从而使系统具有适应时变特性的能力,能直接反映系统动态过程特性[8-9].
Elman网络一般分为4 层:输入层、中间层(隐含层)、承接层和输出层,如图3所示,图中符号含义见式(7),(8)和(9)的参数解释.输入层的单元仅起信号传输作用,输出层单元起线性加权作用,隐含层单元的传递函数可采用线性或非线性函数,承接层又称为状态层,它用来记忆隐含层单元前一时段的输出值并返回给输入,可认为是延时算子.
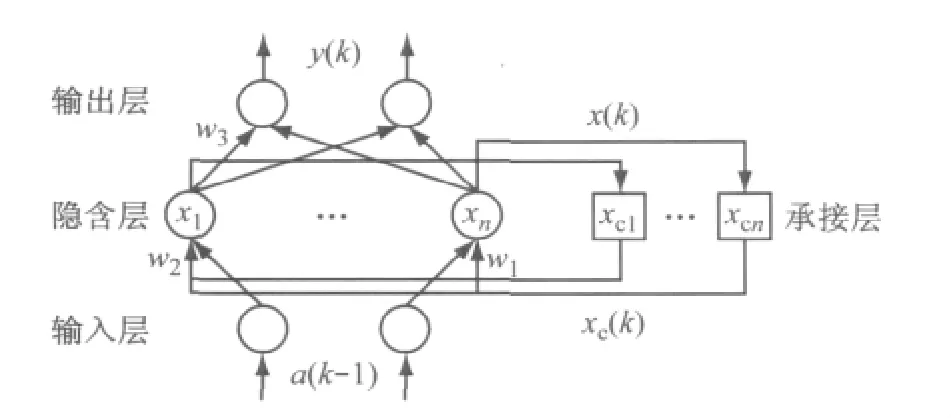
图3 Elman网络结构图Fig.3 Structure of Elman neural network
Elman网络的特点是隐含层的输出通过承接层的延迟与存储,自联到隐含层的输入.这种自联方式使其对历史状态的数据具有敏感性,内部反馈网络的加入增加了网络本身处理动态信息的能力,从而达到了动态建模的目的.基于Elman网络的模糊信息粒子预测模型如下:
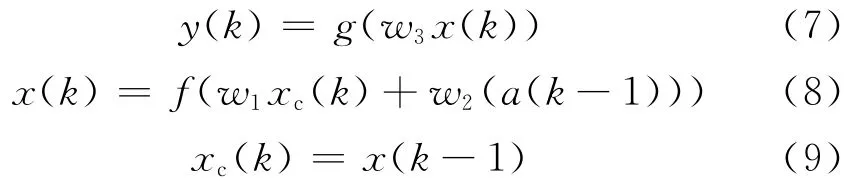
式中:y,x,a,xc分别为m维输出节点向量、n维中间层节点单元向量、r维时间序列输入向量和n维反馈状态向量;w3,w2,w1分别表示中间层到输出层、输入层到中间层、承接层到中间层的连接权值;g(·)为输出神经元的传递函数,是中间层输出的线性组合;f(·)为中间层神经元的传递函数,常采用S函数,即f(x)=1/(1+e-x).Elman网络学习指标函数采用如下误差平方和函数:

式中:E(w)为学习指标函数;yk(w)为目标输出向量真值;~yk(w)为目标输出向量预测值.
基于模糊信息粒化的Elman网络交通流状态变化趋势判别主要步骤为:
步骤1 建立Elman网络模型对模糊信息粒子进行预测;
步骤2 根据预测的模糊信息粒子,计算道路网交通流状态综合指数,结合交通流状态划分阈值,判别道路网交通流状态.
应用于交通流状态变化趋势预测的道路网交通流状态综合指数计算方法如下:

式中,Kt+1为t+1时刻道路网交通流状态综合指数.根据计算的道路网交通流状态综合指数可判别道路网交通流状态变化趋势.
4 实证性研究
以图4所示预测范围内9个断面24h以2min为时间间隔的交通流占有率数据,数据为6 480×1型矩阵,按照模糊信息粒化模型对原始数据进行模糊信息粒化.本文将9个断面的交通流占有率数据作为一个窗口大小,将同一时段的占有率模糊粒化为L,R,U三个参数,结果如图5所示.
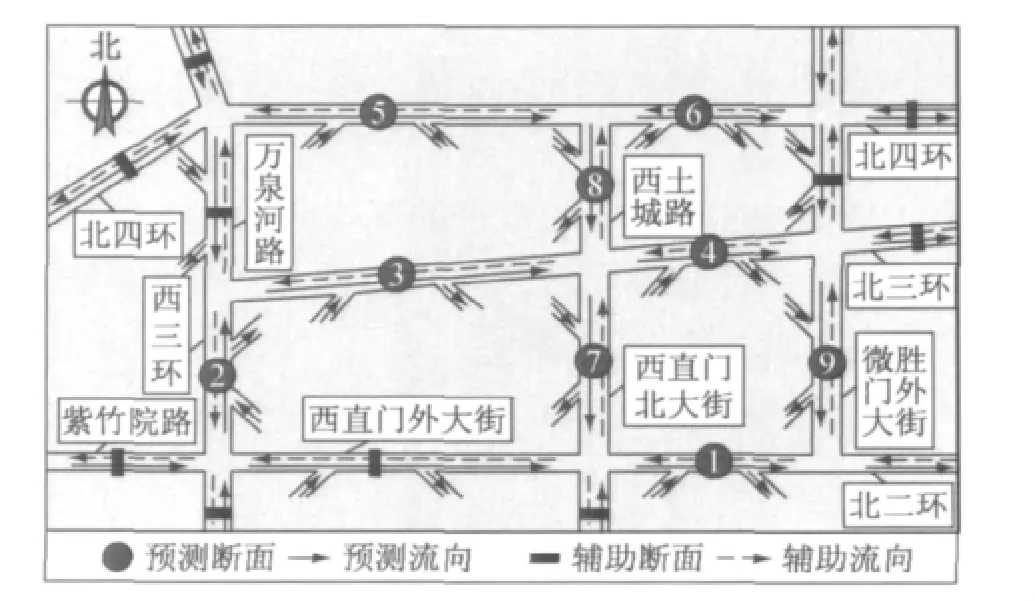
图4 区域快速路网示意图Fig.4 A test expressway network
粒化后的3个参数均服从占有率的时间变化规律,其中,L描述的是道路网交通流状态变化的最小值;R描述的是道路网交通流状态变化的平均水平;U描述的是道路网交通流状态变化的最大值.
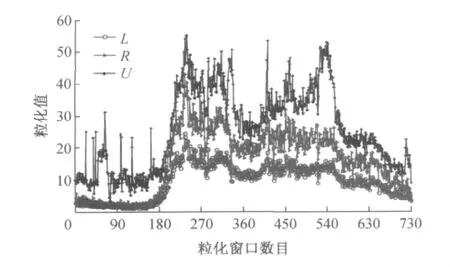
图5 模糊信息粒化结果图Fig.5 Result of of fuzzy information grain
根据模糊信息粒化结果,建立Elman网络模型对模糊信息粒子进行预测.训练输入样本为719×3型矩阵,训练输出样本为719×3型矩阵,即以前一时段的模糊信息粒子作为输入,预测下一时段模糊信息粒子值,根据输入、输出样本的数据特征,设计Elman网络输入节点为3,输出节点为3,隐层节点数由试算法确定,初步设定隐层节点数为4-11,然后用训练样本集合对Elman网络模型进行训练测试,评价其预测效果,选择出最优模型.表1 为不同隐层节点下训练的Elman网络模型性能.
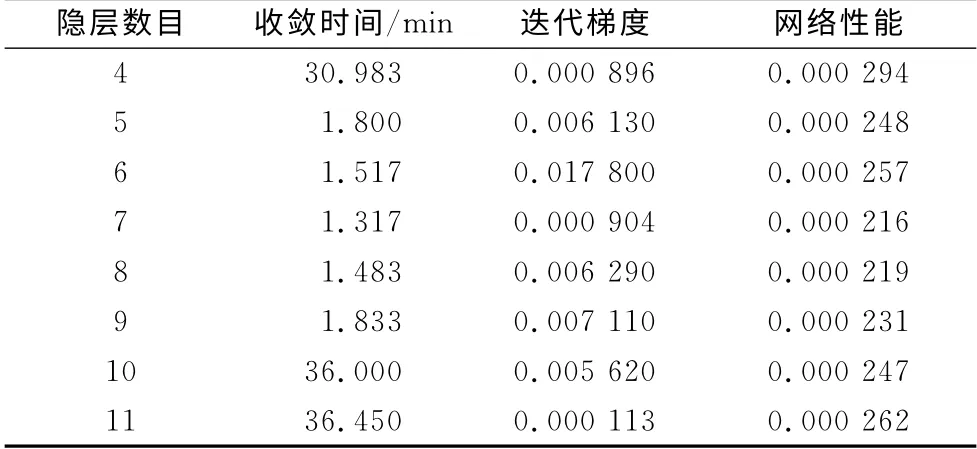
表1 不同隐层节点下Elman网络性能比较Tab.1 Comparison of Elman NN performance for difference hidden note
由表1可知,隐层节点数为7的Elman网络性能最好,因此采用隐层节点数为7的Elman网络用于模糊信息粒子的变化趋势预测.
以预测范围内1h的交通流实测数据模糊粒化值作为测试样本,利用训练得到的Elman模型,对测试样本L,R,U进行回归预测,结果如图6a所示.由图6a可知,R参数的预测效果最好,U参数预测有偏大的趋势,而L参数预测有偏小的趋势,3个参数预测的平均绝对百分比误差(mean absolute percentage error,MAPE)与平均绝对偏差(mean absolute deviation,MAD)如表2所示.

表2 基于Elman网络的模糊信息粒子预测误差Tab.2 Prediction error of fuzzy information grain with Elman NN
根据预测得到的L,R及U按式(11)计算道路网综合状态指数,采用Ofree=22%,Ocong=54%,Ojam=80%作为道路网交通流状态判别阈值,判别结果如图6b所示,其中Ofree,Ocong和Ojam分别为根据实测值估算的自由流、拥挤流和阻塞流状态下时间占有率临界值.30个时间序列中共存在2次误判,判别准确率为93.33%.

图6 基于Elman网络的交通流状态变化趋势判别Fig.6 Identification result of traffic states on expressway network with Elman neural network
为了比较方法的有效性,以图4所示预测范围内9个断面24h的交通流数据作为训练集建立交通流状态判别支持向量机(SVM)模型,训练集数据为6 480×3型矩阵,建模过程采用交叉验证方法优化模型中的惩罚参数c和核函数γ.优化后的SVM 模型可以使训练集交通流状态判别结果准确率达到99.83%.采用优化的SVM 模型,在相同条件下对道路网交通流状态进行判别,结果如图7所示.由于是以当前时段的交通流参数判别未来时段的交通流状态,因此存在一定的时滞性,30个时间序列中共存在4次误判,判别准确率为86.67%.通过对比发现,本文提出的交通流状态变化趋势判别方法,判别准确率高,且优于基于SVM 的方法.
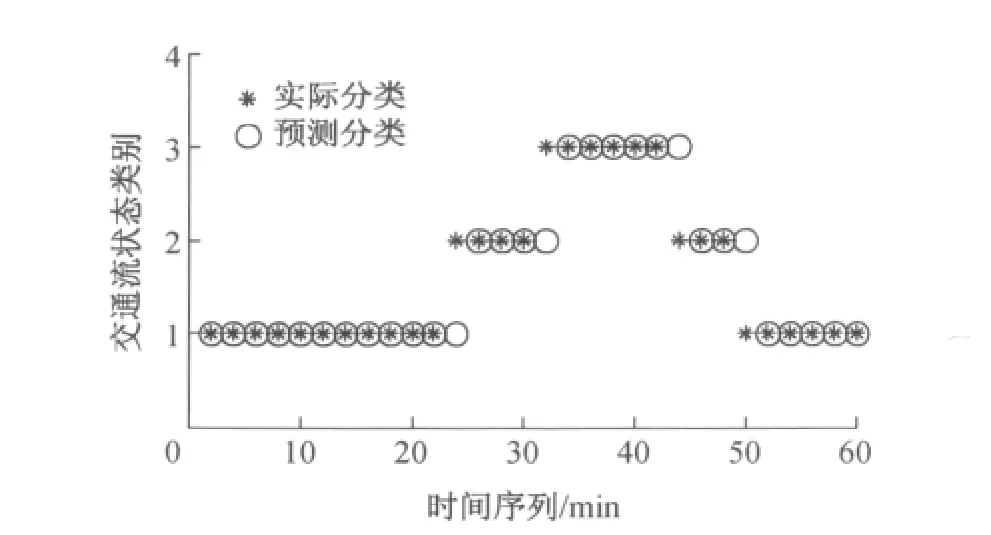
图7 基于SVM 的快速路网交通流状态判别结果Fig.7 Identification result of expressway network traffic states with SVM Model
5 结语
(1)基于城市快速路交通流实测数据,结合基本图和三相交通流理论,将城市快速路交通流状态划分为自由流状态、阻塞流状态和拥挤流状态.
(2)应用模糊信息粒化的方法,以道路网检测断面数为窗口,设计三角形模糊隶属函数,将同一时段的道路网交通流占有率映射为含有R,L和U三参数的模糊信息粒子表征道路网交通流状态变化趋势.
(3)建立Elman网络模型,以模糊信息粒参数R,L和U为输入,预测道路网交通流状态变化趋势,在此基础上计算道路网交通流状态综合指数,判别道路网交通流状态.
(4)以北京市某一区域路网为例,进行了实证性研究,研究结果表明,本文提出的方法能够实现道路网交通流状态变化趋势的预测判别,准确率为93.33%,同等条件下SVM 模型判别准确率仅为86.67%.
[1] Payne H J,Tignor S C.Freeway incident-detection algorithms based on decision trees with states[J].Transportation Research Record 682,1978:30.
[2] Chassiakos A P,Stephanedes,Y J.Smoothing algorithms for incident detection[J].Transportation Research Record 1394,1993:8.
[3] Abdulhai B. A neuro-genetic-based university transferable freeway incident detection framework [J].Transportation Research Record 1859,1996:171.
[4] Antoniades C N,Stephanedes Y J.Single-station incident detection algorithm (SSID)for sparsely instrumented freeway sites [C]//Applications of Advanced Technologies to Transportation Engineering,New York:ASCE,1995:218.
[5] Boris S Kerner.Three-phase traffic theory and highway capacity[J].Physica A,2004,333:379.
[6] Boris S Kerner,Sergey L Klenov,Andreas Hiller.Empirical test of a microscopic three-phase traffic theory[J].Nonlinear Dynamics,2007,49:525.
[7] 候方国,胡圣武.模糊信息粒化理论在空间信息系统地位的探讨[J].测绘与空间地理信息,2004,27(3):14.HOU Fangguo,HU Shengwu.Study on the position of TGIF in spatial information system[J].Geomatics &Spatial Information Technology,2004,27(3):14.
[8] DONG Chunjiao,SHAO Chunfu,LI Xia.Short-term traffic flow forecasting of road network based on spatial-temporal characteristics of traffic flow [C]//2009 WRI World Congress on Computer Science and Information Engineering, Los Angeles:[s.n.],2009:645.
[9] 董春娇,邵春福,熊志华,等.基于Elman神经网络的道路网短时交通流预测方法[J].交通运输系统工程与信息,2010,10(1):145.DONG Chunjiao,SHAO Chunfu,XIONG Zhihua,et al.Shortterm traffic flow forecasting of road network based on Elman neural network [J].Journal of Transportation Systems Engineering and Information Technology,2010,10(1):145.