基于粒子群算法的阵列位置误差校正方法
2012-12-01王石泉许阳明
王石泉,许阳明,张 旻
(1.解放军电子工程学院,安徽 合肥 230037;2.安徽省电子制约技术重点实验室,安徽 合肥 230037)
0 引言
以阵列天线为基础的 MUSIC[1]等无线电测向方法能够正常高分辨率工作的前提是假设一个理想的阵列模型。该模型需要准确已知天线阵列各阵元的相对位置,而实际中安装误差、测量误差、阵列工作环境及机载或舰载平台的振动等因素会引起天线阵元位置发生变化,导致理想阵元位置与实际阵元位置之间总存在误差即阵列位置误差(阵列中各阵元的位置误差,也常称之为阵元位置误差)。理论分析和仿真实验都表明这些阵元位置误差会使测向算法的性能急剧下降,甚至失效[2]。为消除阵元位置误差的影响,学者对阵元位置误差的校正进行了大量研究,得到了许多算法。如文献[3]针对等间距直线阵,在子空间原理的基础上结合遗传算法,提出了一种天线阵元位置误差的有源校正方法,虽然该方法利用了遗传算法的寻优特性,也得到了一定的校正结果,但由于遗传算法涉及参数的编码,基因的交叉、变异等复杂选择操作,使得该类算法在接近最优解时收敛缓慢,计算变得复杂,难以保证全局最优。
针对文献[3]中的缺陷,本文提出一种新的阵列位置误差有源校正算法。
1 阵列数学模型及问题描述
1.1 阵列数学模型
以均匀线阵为例进行说明,如图1所示。假设阵列由M个全向天线构成,阵元间距为d,以第1个阵元所在位置为坐标原点,阵列所在直线为X轴,则在无阵列位置误差的情况下,各阵元的位置为(xi,yi),i=1,2,…,M。考虑N个远场的,互不相关的窄带信号入射到空间该均匀线阵上,其中入射信号的波长为λ,入射波来向为θk,k=1,2,…,N 。由文献[4]可知阵列接收信号表示为:

式(1)中,X(t)为阵列各阵元接收数据,A(θ)为M×N 维 阵 列 流 型 矢 量 且 A(θ)= [a(θ1),a(θ2),…,a(θM)],S(t)= [s1(t),s2(t),…,sN(t)]T为N×1维入射信号,N(t)= [n1(t),n2(t),…,nN(t)]T为N×1维噪声矢量,则阵列输出的协方差矩阵可以定义为:
R =E[X(t)XH(t)]=A(θ)RSAH(θ)+σ2I (2)式(2)中,RS为信号协方差矩阵,I为单位矩阵,σ2为相互独立的零均值平稳高斯白噪声的平均功率,且其与信号源之间互不相关[4]。考虑到实际接收数据矩阵是有限长的,设实际接收的快拍数为L,则数据协方差矩阵的最大似然估计可以表示为:

对式(3)进行特征分解,得到由N个大特征值对应的特征向量所构成的信号子空间Es和其余M-N个特征向量所构成的噪声子空间EN,根据子空间基本原理,可得MUSIC谱搜索函如下:


图1 均匀线阵模型Fig.1 Linear equal spaced array model
1.2 问题描述
与文献[3]一致,本文仅研究存在阵元位置误差时的阵列误差校正,不考虑阵元通道幅相误差(天线接收机接收通道不一致)和阵元互耦(天线间互耦)等其它误差因素的影响。在无阵元位置误差的情况下,式(2)中的阵列流型矢量中的导向矢量a(θi)可以表示如下:

式(5)中,(xi,yi)(i=1,2,…,M)为各阵元所在位置坐标。当受外界各种因素的影响而使得各阵元偏离原有理想位置(即存在阵元位置误差)情况下的导向矢量ae(θi)可以表示为:

式(6)中,(xei,yei)(i=1,2,…,M)为各阵元此时的真实位置坐标。由式(5)、式(6)可看出在阵元位置误差存在的情况下,导向矢量已发生了变化。如果在MUSIC等子空间类算法中继续使用a(θi)(无阵元位置误差时的导向矢量),利用它与噪声子空间EN之间的正交关系来寻找谱峰的话,显然会得不到准确的DOA估计值,这将会导致该类算法完全失效。
2 基于粒子群算法的解决方案
2.1 校正算法原理
要实现阵元位置误差的校正,就必须重新构造无阵元位置误差情况下的导向矢量a(θi)使其等于实际情形下的导向矢量ae(θi),其本质就是要寻找各阵元的实际位置(xei,yei)(i=1,2,…,M)。
本文采用图1的校正方法,在M元均匀线阵中,利用一个方位准确已知(假设为θ)的校正源(如图1虚线框中所示)。首先对阵列接收信号求协方差,获取阵元位置误差存在情况下的协方差矩阵R=E[X(t)XH(t)],然后对其进行特征分解得到M 个特征值:λ1>λ2≥ … ≥λM及相应的特征矢量μ1,μ2,…,μM。设这M个特征矢量所张成的空间为E,由于只有一个校正源,基于子空间基本原理可知最大特征值λ1所对应的特征矢量μ1即为信号子空间Es,剩余M-1个特征矢量组成的矩阵即为噪声子空间EN,如式(7)所示:

提取噪声子空间EN,然后以导向矢量a(θ)为变量建立如下函数关系式:

由式(5)可知a(θ)与各阵元的位置坐标(X,Y)= ((x1,y1,),(x2,y2),…,(xM,yM))存在一一对应的映射关系,显然当各阵元的位置坐标为真实位置坐标时即满足(xi,yi)= (xei,yei)(i=1,2,…,M)时,a(θ)=ae(θ),由ae(θ)与EN的正交关系可知式(8)将取得最大值。因此寻找各阵元的实际位置就等价于对式(8)进行优化处理,获取一组(Xe,Ye)值并得到对应于这组值的导向矢量ae(θ)使式(8)取得最大值,这组值就是当前阵元实际位置的估计值。由于粒 子 群 算 法[7-8](Partical Swarm Optimization,PSO)在求解最优化问题上有着其他优化算法无可替代的优势,因此可以利用它对式(8)进行优化,寻找阵元实际位置,完成阵元位置误差的校正。
粒子群优化算法是一种基于群智能方法的演化计算技术,是一种基于迭代的最优化工具,它无需编码、选择、变异等复杂操作,初始化为一组随机解,是一个并行迭代的搜索过程,通过迭代搜寻最优值。其速度和位置迭代更新公式如下[9]:

式(9)中,w是惯性权因子,c1和c2是学习因子,r1和r2为0到1之间均匀分布的随机数,d是待优化问题解的维数,pk,h是当前时刻粒子本身所找到的最优解,pg,h是当前时刻整个种群找到的最优解。通过各粒子不断地更新位置和速度,不断地迭代搜索最终得到问题的最优解。
对各阵元所处的位置坐标随机赋予初值,建立起数量为L的粒子种群X,即X= [X1,…,XL],其中Xi代表第i个粒子中各阵元的位置取值,可表示为 Xi= [(xi1,yi1),…,(xiM,yiM)],首先将 Xi(i=1,2,…,M)代入式(5)求出相应的导向矢量ai(θ),然后将得到的导向矢量ai(θ)分别代入式(8),求取各个粒子的适应度值,找出适应度值的最大值所对应的粒子Xi作为整个种群中的初始最优解。同时随机初始化各粒子的搜索速度ΔX,基于粒子群算法原理建立如下粒子速度和位置迭代更新公式:

式(10)中,ΔXk,h(t+1)表示第t+1次迭代时第k个粒子中第h个阵元位置值的搜索速度,Xk,h(t)表示第t次迭代时第k个粒子中第h个阵元所处的位置,Xk,h表示当前时刻第k个粒子中第h个阵元自身所找到的最优位置,X*g,h表示当前时刻整个粒子种群中第h个阵元所找到的最优位置。通过此更新迭代公式,各粒子开始进行迭代搜索,每一次迭代后,首先将每个粒子所在位置取值Xk= [(xk1,yk1),…,(xkM,ykM)]代入式(5)计算得到导向矢量ak(θ),将ak(θ)代入适应度评估函数式(8)以评价各粒子的适应度值,然后选择适应度值最大的粒子所在位置作为本次迭代所找到的阵元最优位置值。
具体的迭代搜索过程是各个粒子利用上次迭代所找到的最优位置解X*k,h和整个种群所找到的最优位置解X*g,h,以式(10)为依据确定当前自己的搜索速度和所在位置,并在迭代过程中根据适应度值的大小不断调整自身的位置、搜索速度同时不断更新整个种群中的最优位置解。经过若干次的迭代搜索,当适应度函数达到收敛时,各粒子将最终一起找到解空间中的最优位置解即得到各阵元真实位置的估计值,完成对式(8)的优化,实现对阵元位置误差的校正。
2.2 算法实现步骤
至此可以给出本文校正算法步骤如下:
步骤1:设计校正源信号,假设某一入射角度已知的窄带远场校正源信号入射到图1所示均匀线阵上,设置相应的信噪比。
步骤2:按照式(2)对阵列接收信号进行处理,获得协方差矩阵,并对其进行特征分解得到噪声子空间EN。
步骤3:设计粒子群算法中的各个参数。本算法采用基本粒子群算法,学习因子c1=c2=1,惯性权重系数w=0.729,仿真中粒子初始群体数目设为40,迭代次数设为300,采用式(8)作为适应度函数。
步骤4:利用粒子群算法迭代寻优,直到目标函数收敛或者到达指定的迭代次数,搜索停止,最终输出粒子的最优位置解得到阵元的实际估计位置。
步骤5:用得到的阵元实际估计位置替代高分辨率算法中阵元的理想位置,获得估计的空间谱,完成阵列位置误差的校正。
3 计算机仿真实验
3.1 实验1阵列位置误差影响仿真实验
假设阵列为8元的均匀线阵,阵元间距为半波长,以第一阵元为坐标原点,阵列所在方向为x轴,不失一般性,假设阵元只在x轴上存在误差,仅考虑与阵元共面的来波信号。现有三个互不相干的远场窄带信号同时到达该阵列,其方位角分别为-45°、-24°和17°,信噪比SNR为5dB,快拍数L取1 024,假设阵列各阵元实际位置与理想位置的偏差在[0 1]之间服从均匀分布。图2为无阵元位置误差和有阵元位置误差时的MUSIC空间谱图。

图2 有无位置误差空间谱对比Fig.2 The comparison between having position errors and not having position errors
由图2可看出在无阵元位置误差的情况下,MUSIC空间谱在信号入射方位上谱峰尖锐,幅值取得极大值,表明此时MUSIC方法能够准确地估计出入射信号的方位角;当存在阵元位置误差时,MUSIC谱在信号入射方位上已经不能取到极大值,且其幅值与无误差时相比已经有大幅度衰减,此时MUSIC算法已经不能正确估计出入射信号的方位角了。因此在有阵列位置误差的情况下,MUSIC等一系列基于子空间的超分辨率算法的性能已恶化,甚至失效,此时要继续使用它们就必须对阵列位置误差进行校正。
3.2 实验2验证算法有效性仿真实验
实验条件同实验1,信噪比SNR改为10dB。采用本文方法对阵元位置误差进行校正,表1为阵列各阵元理想位置、实际位置、本文算法得到的估计位置和估计的相对误差(估计值与真实值之间差的绝对值);图3为校正前后的MUSIC空间谱;图4为目标函数的迭代次数与目标函数适应度值的关系曲线。

表1 本文算法校正结果Tab.1 The calibration result using this method

图3 校正前后空间谱对比Fig.3 The comparison between after calibration and before calibration

图4 目标函数与迭代次数曲线Fig.4 Target function and iteration numbers
从表1可以看出,在上述仿真条件下,阵元的最大位置估计误差仅为0.007 3。因此本文提出的校正方法可以较准确地估计出阵列各阵元的实际位置;从图3可以看出,校正前MUSIC谱峰不仅偏离信号入射方向而且谱峰值在入射方向上取最大值不明显,但是经过校正后,MUSIC空间谱可以明显地在三个信源入射方位上形成尖锐的谱峰,因此本文提出的校正算法已经成功对阵列位置误差进行了校正;从图4可以看出本文算法有着较快的收敛速度。通过大量的仿真实验可以得到迭代次数在100次以内,算法都具有较好的收敛性。
3.3 实验3针对均匀圆阵的仿真实验
假设阵列为5元的均匀圆阵,半径为1.5,以第一阵元为坐标原点,阵列所在平面为x-y平面,不失一般性,假设阵元只在y轴方向存在误差。实验条件和参数设置同实验1,利用本文算法对阵元位置误差进行校正。图5为阵元理想位置、实际位置和本文算法估计位置平面图。
由图5可以看出与均匀线阵一样,本文算法对均匀圆阵中存在的位置误差同样有着较为理想的校正效果,估计得到的阵元实际位置基本与阵元实际位置重合,因此本文算法不仅适用于均匀线阵同样也适用于均匀圆阵,还可以推广应用于其他任意形状的阵列。
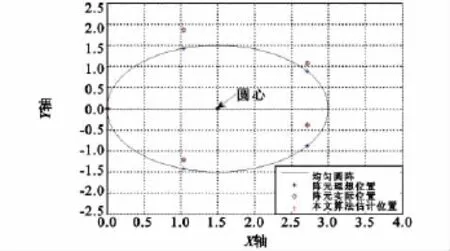
图5 均匀圆阵阵元位置误差校正Fig.5 The position errors calibration in the circular equal spaced array
3.4 实验4性能比较仿真实验
文献[3]提出用遗传算法估计阵元实际位置来校正阵列位置误差,为证明本文提出算法在运算速度和性能上优于前者,现做如下仿真实验。实验环境:Intel(R)Pentium(R)4CPU 3GHz;1.0GB 内存;Mata 7.8.0开发平台;实验条件:假设在仿真过程中两种算法阵列中各阵元的实际位置相同,校正源信噪比也相同(5dB),两种算法的初始群体都设为40,进化代数和迭代次数设为1 000,每一次进化代数或迭代次数做30次蒙特卡罗实验然后取平均。阵列采用8元均匀线阵,假设各阵元的实际位置为xi(i=1,2,…,M),估计出阵元的位置为yi(i=1,2,…,M),现定义阵列位置估计偏差如下:

图6给出了利用文献[3]的方法和本文方法估计出来的阵列位置估计偏差与算法进化(迭代)次数的关系。

图6 文献[3]与本文方法对比Fig.6 The comparison between method in literature 3and in this paper
由图6可知,文献[3]提出的算法虽然进化代数在100代时开始走向收敛,但其收敛值直到第700代还不稳定,收敛值较大(为0.606 1),而本文提出的算法在迭代次数在55代左右就已经开始收敛,收敛值稳定且很小(仅为0.038 7)。这说明本文算法解决了文献[3]算法在适应度函数在接近全局最优解时收敛速度缓慢甚至出现的收敛停滞现象。经测试,文献[3]提出的算法进化一代所需时间为0.020 47s,而本文提出的算法迭代一次所花时间为0.011 40s。因此本文算法在运算速度和校正精度上都优于文献[3]中的算法。
4 结论
本文提出了一种基于粒子群算法的阵元位置误差校正方法。该方法利用一个方位已知的校正源,从阵列输出的协方差矩阵中提取位置信息,建立目标函数,然后利用粒子群算法运算简单、寻优能力强的优势,得到阵列阵元的实际位置估计值。与文献[3]相比本文提出的算法过程更加简单,精度更高,更加符合于实际工程对效率和准确度的需要。计算机仿真结果表明:本文算法可以推广应用于任意形式的阵列,经过该算法校正过的MUSIC算法的性能已经接近无阵列位置误差时的性能,从而显示了该方法的实用性和有效性。
[1]Schmidt R.Multiple emitter location and signal parameter estimation[J].IEEE Trans AP on,1986,34 (3):267-280.
[2]Friedlander B.A sensitivity analysis of the music algorithm[J].IEEE Trans on ASSP,1990,38(10):1 740-1 751.
[3]于斌,宋铮,张军.阵列天线阵元位置误差的一种有源校正算法[J].雷达科学与技术,2004(5):315-320.YU Bin,SONG Zheng,ZHANG Jun.A new technique for calibrating position uncertainty of sensor array using signal sources[J].Radar Science and Technology,2004(5):315-320.
[4]王永良,陈辉,彭应宁,等.空间谱估计理论与算法[M].北京:清华大学出版社,2004.
[5]王鼎,林四川,李长胜.一种新的阵元位置误差有源校正算法[J].雷达科学与技术,2008(3):226-230.WANG Ding,LIN Sichuan,LI Changsheng.A new algorithm for active calibration of array shape[J].Radar Science and Technology,2008(3):226-230.
[6]熊立志,漆兰芬,张元培.一种新的天线阵列位置误差校正算法[J].电波科学学报,2004,19(2):192-194.XIONG Lizhi,QI Lanfen,ZHANG Yuanpei.A new algorithm for antenna array position correction[J].Chinese Journal of Radio Science,2004,19(2):192-194.
[7]Kennedy J,Eberhart R.Particle swarm optimization[C]//IEEE International Conference on Nerual Networks.Perth,Australia:IEEE,1995:1 942-1 948.
[8]Berhart R,Kennedy J.A new optimizer using particle swarm theory[C]//Pro of the Sixth International Sympo-sium on Micro Machine and Human Science.Nagoya,Japan:IEEE,1995:39-43.
[9]董延胜,张安年.粒子群优化算法与BP算法和遗传算法的比较研究[J].信息化纵横,2009(13):4-6.DONG Yansheng,ZHANG Annian.Research of particle swarm optimization algorithm comparison with backpropagation algorithm and genetic algorithm[J].Review and Comment,2009(13):4-6.