基于飞行品质评估的无人直升机鲁棒控制器设计
2012-11-16刘鹏王强蒙志君武哲
刘鹏, 王强, 蒙志君,*, 武哲
1. 北京航空航天大学 航空科学与工程学院, 北京 100191 2. 北京航空航天大学 自动化科学与电气工程学院, 北京 100191
基于飞行品质评估的无人直升机鲁棒控制器设计
刘鹏1, 王强2, 蒙志君1,*, 武哲1
1. 北京航空航天大学 航空科学与工程学院, 北京 100191 2. 北京航空航天大学 自动化科学与电气工程学院, 北京 100191
提出了一种改进的无人直升机H∞回路成形鲁棒控制器设计方法。首先将系统辨识技术引入到无人直升机高带宽控制器设计,根据飞行扫频数据,得到包含直升机动力学模型耦合特性的非参数频率响应,依据频率响应拟合待辨识模型得到无人直升机高精度的飞行动力学模型。然后根据该模型,采用改进的H∞回路成形方法设计了无人直升机内回路控制器,针对H∞回路成形方法中权值矩阵选取困难的问题,利用了最大右约数(GCRD)方法以实现实际系统和期望系统的传递函数矩阵之间的转换。与传统的对角型权值矩阵相比,使用此方法成形后的系统具有更宽的鲁棒稳定裕度,系统的解耦性和频带也显著提高,而且可以大大降低设计人员选取权值矩阵的复杂性和盲目性。通过仿真验证,所设计的无人直升机系统的飞行品质满足军用标准ADS-33E中一级区域的要求。
直升机; 鲁棒控制; 系统辨识; 最大右约数;H∞回路成形; 飞行品质
近年来随着无人直升机飞行控制技术的迅速发展,无人直升机已经引起了国内各航空院校、研究院所和军方的广泛关注,但是已有的控制器带宽较低,而且在风干扰等复杂环境的控制效果一般[1-3]。究其原因就是缺少高精度的飞行动力学模型阻碍了先进的控制算法应用于无人直升机高带宽控制器设计[4-6]。
频域辨识方法是建立高精度的无人直升机飞行动力学模型的一种有效方法。直升机的旋翼、发动机和传动装置等高阶振动将导致飞行试验中测量噪声很大,频域分析可以通过滤波和相干性分析去除噪声的影响,而通常采用的时域辨识方法由于噪声对测量信号的影响很大,建立精确的动力学模型比较困难。
H∞回路成形方法是由McFarlane和Glover提出的,它将经典控制理论与现代鲁棒控制相结合,是设计多输入多输出(MIMO)系统鲁棒控制器的一种非常有效的方法[7]。尽管设计者利用工程经验经常会得到较好的回路成形权值矩阵和控制器,但是在实际设计过程中,如何选取合适的权值矩阵W1和W2得到要求的回路性能指标是很不明显的。这是因为权值矩阵中的每个变量对回路奇异值的影响往往并不明确,尤其是在设计对象存在严重的耦合或者是需要选取非对角型的权值矩阵的时候,而且权值矩阵的选取一般都是靠设计者反复的调整和试凑,非常耗时且带有很大的盲目性,想要得到一个满足性能指标且具有较高鲁棒性的控制器比较困难。
本文采用频域辨识方法得到了高精度的无人直升机飞行动力学模型,并以此模型为基础,利用H∞回路成形方法来设计满足无人直升机高性能飞行品质的鲁棒控制器。在权值矩阵的选取中采用了最大右约数(Greatest Common Right Divisors, GCRD)方法,与传统方法相比飞行性能有了较大的提升。通过仿真结果的验证,所设计的无人直升机系统满足美国军用标准ADS-33E[8]中关于旋翼机飞行品质的要求。
1 小型无人直升机飞行动力学模型
在辨识试验中使用的小型无人直升机是由RaPtor50遥控模型直升机改装而成的,如图1所示。该平台具有5路主要操纵输入,包括总距操纵,航向操纵,横、纵向周期变距操纵和发动机油门操纵,其中总距和油门操纵存在线性耦合关系。
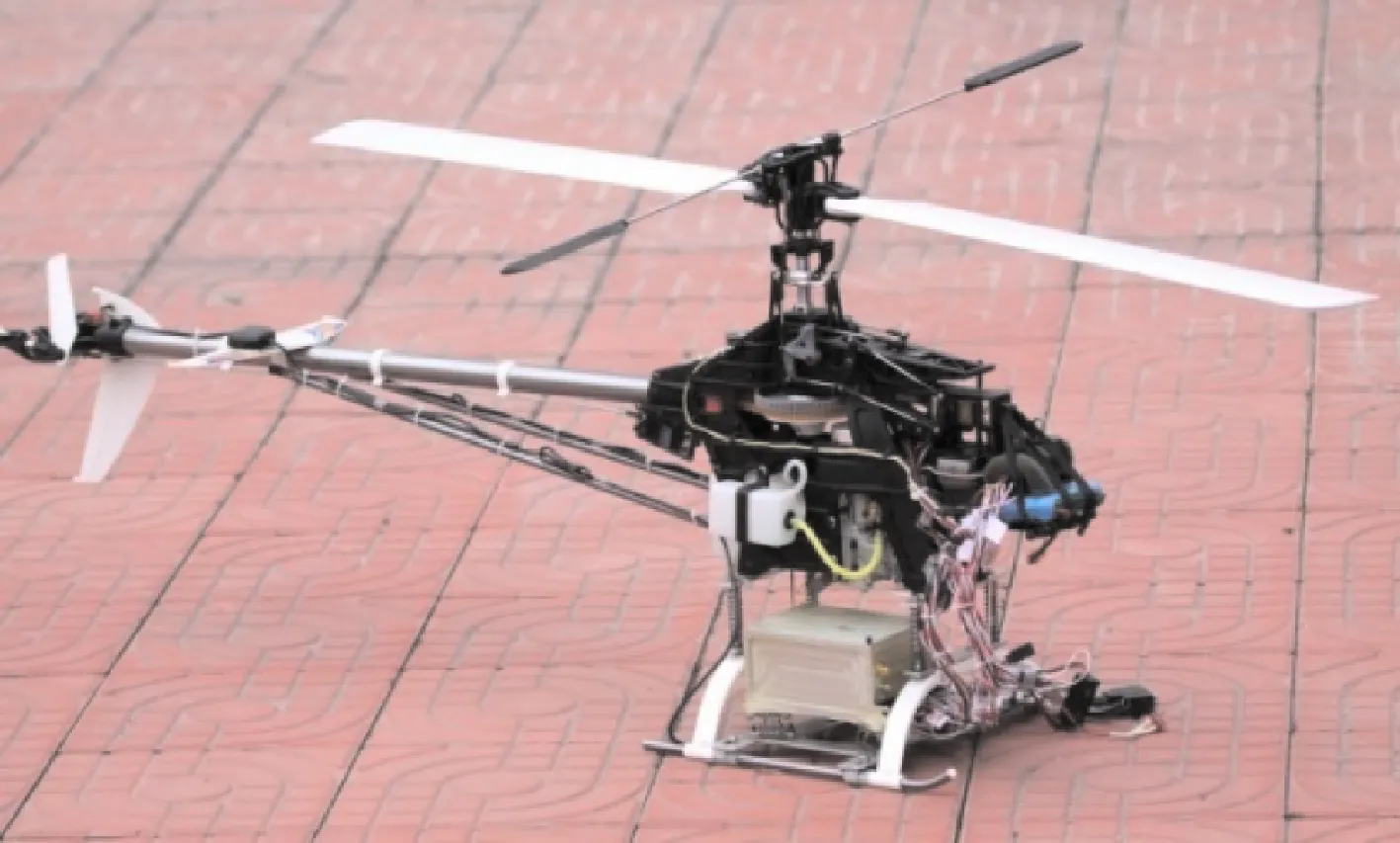
图1 试验使用的无人直升机Fig.1 Instrumented robotic helicopter
使用的无人直升机飞行动力学模型是通过一种改进的频域系统辨识方法得到的[9]。该方法根据飞行扫频数据,得到包含直升机动力学模型耦合特性的非参数频率响应,并根据频率响应对待辨模型结构进行了简化。将模式识别理论应用到搜索状态空间模型代价函数的最小值中,根据机理建模结果拟合频率响应得到线性的六自由度直升机状态空间模型。通过时域验证表明辨识得到的模型精确地反映了该无人直升机的动力学特性。
图2为横向通道扫频数据,从图中可以看到,横向扫频输入和横滚角速度输出有很高的一致性,这为系统辨识提供了很好的频谱特性,可以通过相干函数来判断一致性,通常相干函数值的下限为0.6,低于此下限,辨识结果会产生比较大的随机误差;相干函数值在0.6或者更高时,辨识的模型具有较高的精度[10]。图3为悬停状态下辨识得到的模型和飞行试验数据的频率响应比较,由图3可见两者拟合得非常好。

图2 横向通道扫频数据曲线Fig.2 Lateral sweep data curve



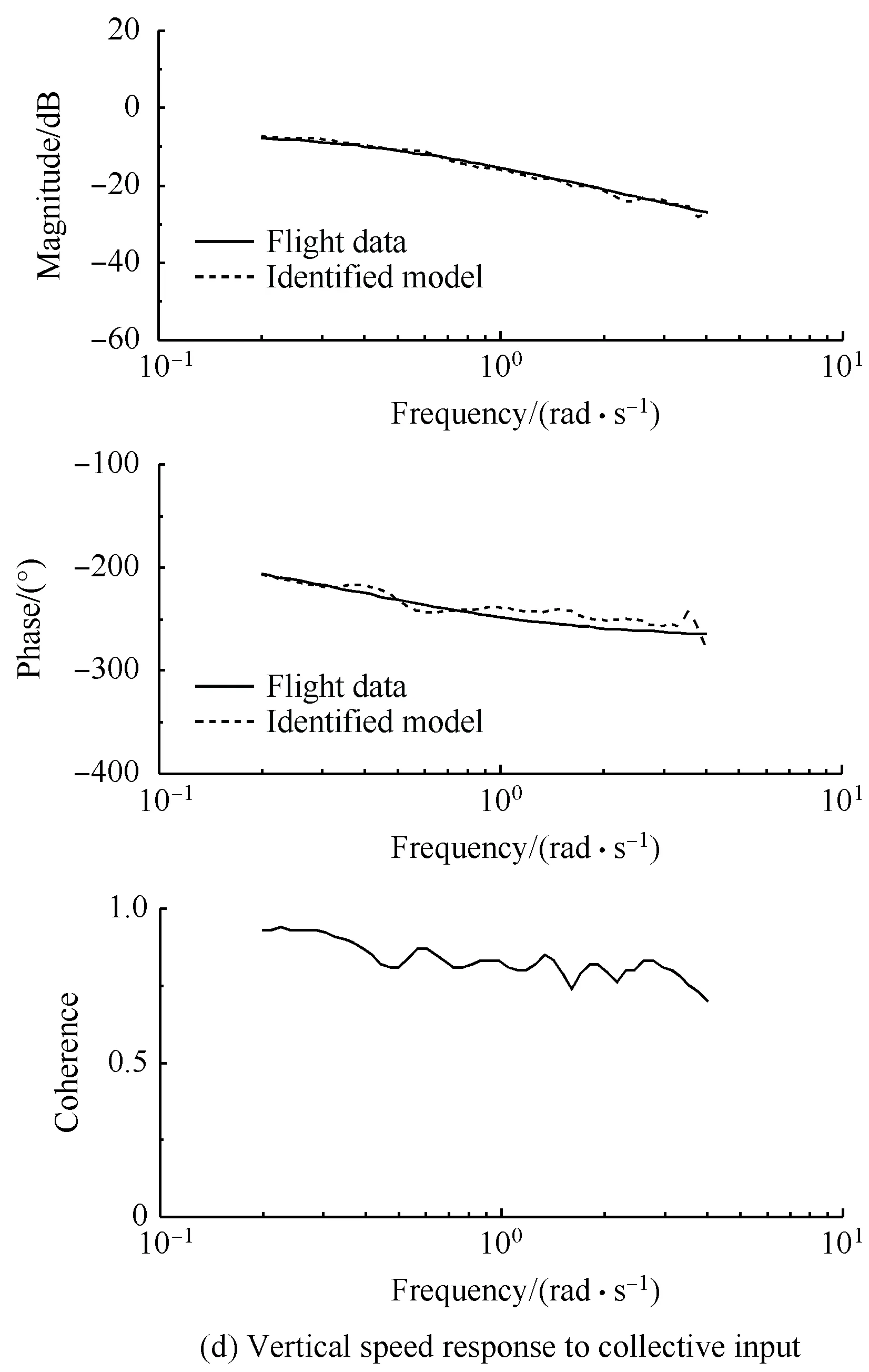
图3 飞行数据和辨识模型的频率响应比较Fig.3 Comparison between the frequency response from the flight data and the identified model
2 H∞回路成形控制器设计
2.1 H∞回路成形设计步骤
在得到无人直升机高精度的飞行动力学模型后,采用H∞回路成形方法来设计满足无人直升机高性能飞行品质的鲁棒控制器。H∞回路成形方法的步骤如下[7]:

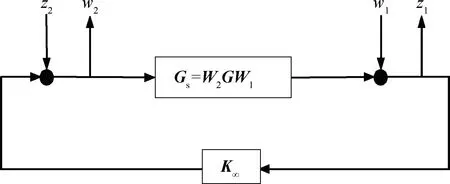
图4 H∞回路成形结构框图Fig.4 H∞ loop-shaping standard block diagram


(1)
式中:I为单位矩阵。稳定裕度ε的值在0到1之间,它是系统鲁棒性和性能的表征。经过理论和实践的检验,当ε>0.3时认为系统的性能比较好。H∞回路成形的理论基础是,如果稳定裕度ε的值不是很小,K∞不会改变期望回路Gs的奇异值。
步骤3检验闭环回路的时域和频域响应以确保系统的飞行品质满足要求,如果不符合则重新调节加权阵并计算K∞,直到闭环系统满足飞行品质要求。
2.2 内回路设计指标

由于小直升机没有专门的飞行品质规范,所以控制器设计的最初目标是在保证鲁棒性的前提下使得系统带宽尽可能的高。由于H∞回路成形方法比较容易设定系统带宽,而且它对于解决多输入多输出系统和对象不确定性效果很好,因而它用来解决无人直升机控制问题非常适合[12]。

图5 内回路控制结构框图Fig.5 Inner loop block diagram
内回路控制器设计完成后,应用美国军用标准中的旋翼机飞行品质规范ADS-33E来检验小直升机的飞行性能。尽管小直升机的飞行性能相比大直升机来说要高一些,然而考虑到加装了机载设备后会对小直升机的飞行性能影响较大,而且舵机的带宽也较低,所以通过设计控制器使得小直升机满足美军标中关于大直升机的飞行品质标准,以此来检验小直升机的飞行品质是可行的。
在ADS-33E中,对于内回路控制器的飞行品质要求如下[8]:
1) 稳定性
闭环系统所有极点都位于s平面左侧,系统单通道的幅值裕度≥6 dB、相角裕度≥45°以保证系统的鲁棒性。
2) 带宽
系统闭环带宽应满足ADS-33E等级1中目标对准和跟踪的指标要求。对于θ、φ和r通道,ADS-33E中系统带宽ωBW的定义是相角为-135°时的对应的频率值。θ、φ和r通道的带宽分别应大于2.0,2.5,3.5 rad/s。对于w通道,ADS-33E中以一阶传递函数的形式给出了要求的速度响应形式为
(2)
该传递函数用来拟合w通道的阶跃响应,拟合后的传递函数要求满足时间常数RTw≤5.0和延时τw≤0.2,确认拟合成功与否的代价系数R2的表达式为

(3)

当式(3)的代价系数R2在0.97和1.03之间时,ADS-33E认为拟合成功。
3) 解耦
对于前两个传递函数,ADS-33E规定的阶跃响应指标为
式中:分子Δθpk和Δφpk为本通道作阶跃变化时所引起的其他通道4 s内的峰值偏离平衡值的差;分母Δφ4和Δθ4为本通道作阶跃变化时4 s内的峰值偏离平衡值的差,它们的比值应在规定的范围内。
对于第3个传递函数,ADS-33E等级1中规定的w通道的阶跃响应对r通道的解耦要求为
式中:r1为3 s前r的峰值,如果没有峰值则取r在1 s时的值r(1)作为r1的值,r3的取值为
r3={
r(3)-r1Whenr1>0
-r(3)+r1Whenr1<0
(4)
4) 扰动抑制
各系统的动特性响应指标满足ADS-33E规范,即在w、r、φ和θ各通道输入端加一脉冲扰动,系统响应应在10 s内回到峰值的10%范围内。
2.3 权值矩阵选取的传统方法
按照2.1节回路成形步骤设计控制器时,其中最关键但也是最困难的地方就是步骤1中权值矩阵的选取,如何通过选取合适的W1和W2来使得成形后的系统满足设计要求,这一过程并不明显,目前为止尚未有系统的设计方法,大部分情况下依赖于设计人员对回路成形概念的理解和掌握以及在工程上的经验的积累[13]。
一般情况下,W1和W2都选为对角型矩阵。其中:W1中含有比例积分(PI)环节,积分环节用来提高低频增益,以提高系统的跟踪性和对干扰的抑制能力,比例环节用来降低系统由于积分环节引起的在穿越频域附近的相角延迟;W2中含有低通滤波器来抑制系统高频段的噪声。通过W1和W2确保成形后的系统满足设计要求。
在保证系统鲁棒性的前提下,期望成形后的开环系统各通道的穿越频率不小于7 rad/s,以保证成形后的系统具有较高的带宽。基于对回路成形概念的理解和掌握以及在工程上的经验的积累,反复调整后最终所确定的W1和W2的表达式为

(5)

(6)
图6为回路成形前后系统的奇异值曲线,由图可以看出,成形后的系统的奇异值曲线满足低频高增益的要求,而且开环系统各通道的穿越频率基本满足设计要求。

图6 G和W2GW1的奇异值曲线Fig.6 Singular value curves of G and W2GW1
在完成了回路成形设计后,求解不等式(1)得到24阶的状态空间形式的K∞控制器,得到的稳定裕度ε=0.395。图7给出了解耦后系统w、r、φ和θ通道包含幅值裕度GM和相角裕度PM的单通道Bode图。由图可见,各通道都满足内环控制器中对于系统稳定裕度的指标要求。



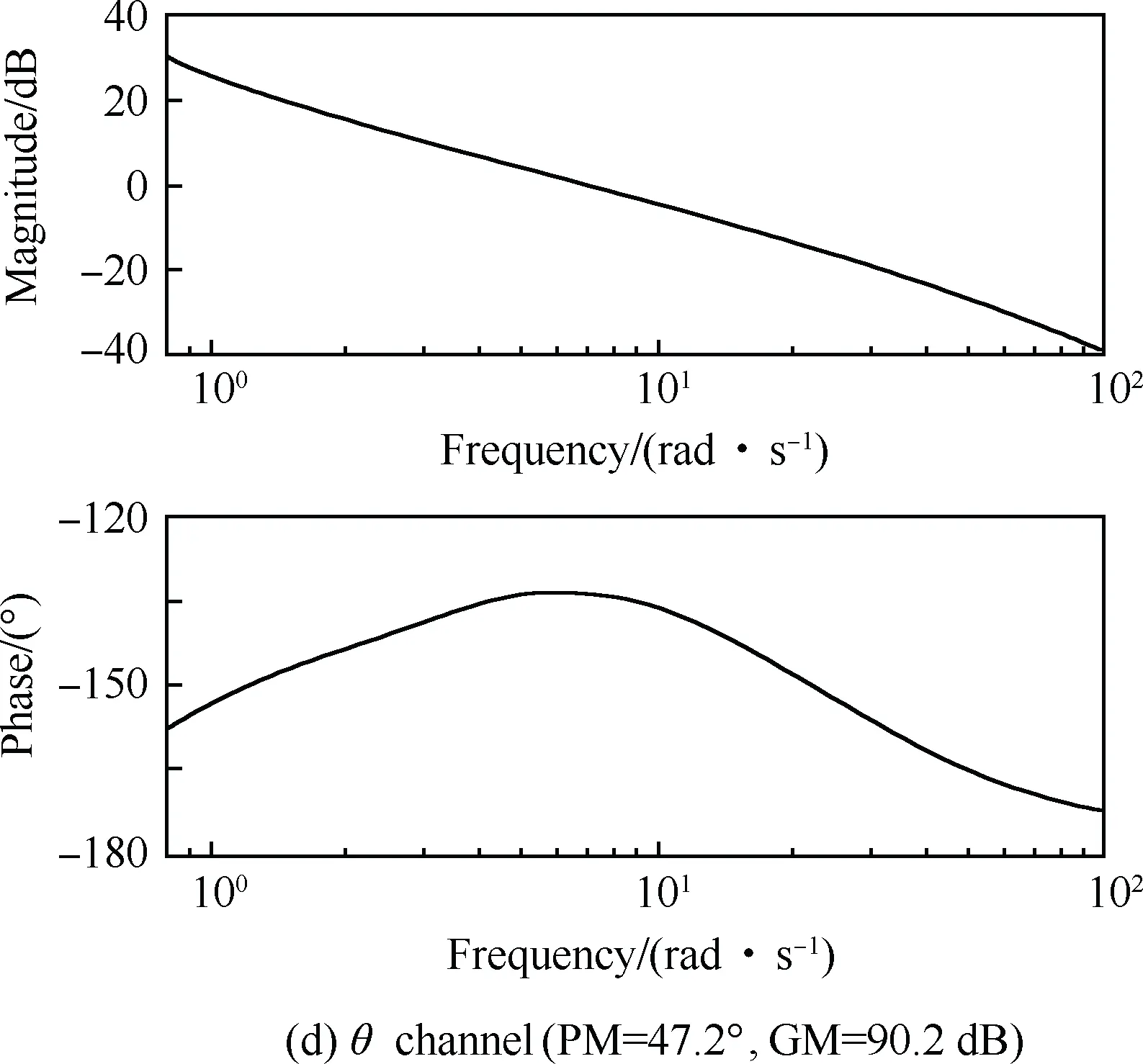
图7 解耦后系统的Bode图(传统方法)Fig.7 Bode plots for decoupling system (traditional method)
2.4 权值矩阵选取的GCRD方法
对于一般的系统而言,通过选取合适的对角形的权值矩阵W1和W2是可以使得成形后的系统满足系统设计指标的。然而,实际的设计经验表明,当使用H∞回路成形方法的对象为通道间耦合性很强的复杂系统(如直升机等),使用对角型的权值矩阵进行回路成形设计时不能很好满足期望的设计指标(通过2.5节的仿真结果比较可以看出)。这时,就需要设计非对角型的权值矩阵来满足系统期望的设计指标[14]。
本文利用GCRD方法来实现H∞回路成形中实际系统G和期望系统Gs的传递函数矩阵之间的转换:Gs=GW,该方法的相关理论参见文献[15]。
下面将利用GCRD方法来实现实际系统G和期望系统Gs的传递函数矩阵之间的转换。
第1步需要确定期望系统Gs的表达式,根据期望成形后的开环系统各通道的穿越频率不小于7 rad/s的要求,最终确定期望成形的系统Gs为
第2步利用GCRD方法求得H∞回路成形中的实际系统G和期望系统Gs的传递函数矩阵之间的转换矩阵W,求得W为13阶的传递函数矩阵。图8为实际成形后的系统L2与期望系统Gs的奇异值曲线比较图,可以看出,实际成形后的系统L2与期望系统Gs的奇异值曲线吻合得非常好。

图8 L2与Gs的奇异值曲线Fig.8 Singular value curves of the real system L2 and the target system Gs
第3步在完成了回路成形设计后,求解不等式(1)得到26阶的状态空间形式的K∞控制器,得到的稳定裕度ε=0.696。
通过上述设计步骤可以看出,使用GCRD方法在确定了期望系统Gs的表达式之后,可以方便地得到权值矩阵W,不必像传统方法中去反复调节W1和W2的值以得到满足指标要求的权值矩阵,而且由于系统耦合较严重,调节权值矩阵中的某个变量会对其他通道的奇异值产生影响,如此反复的调整和试凑,非常耗时且带有很大的盲目性,想要得到一个满足性能指标且具有较高鲁棒性的控制器比较困难。
而且使用GCRD方法得到的控制器阶数(26阶)和使用传统方法(24阶)的差不多,但是稳定裕度(ε=0.696)却比传统方法的(ε=0.395)提高了将近一倍,可见该方法的有效性。
图9为解耦后系统包含幅值裕度和相角裕度的单通道Bode图,可以看出各通道的稳定裕度比利用传统的W1和W2对角阵成形后的系统更大,且远满足内环控制器中对于系统稳定裕度的指标要求。

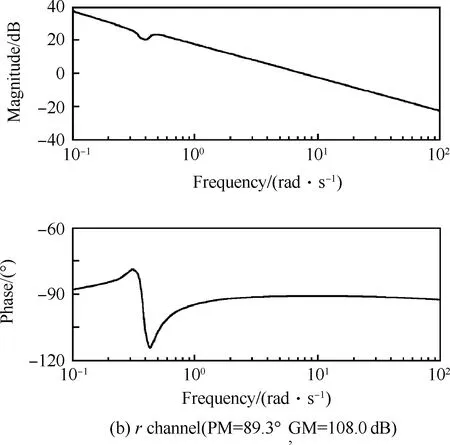


图9 解耦后系统的Bode图(GCRD方法)Fig.9 Bode plots for decoupling system(GCRD method)
2.5 飞行品质验证
2.4节利用权值矩阵选取的GCRD方法重新进行了H∞回路成形设计,并比较了使用GCRD方法和使用W1和W2成形(传统方法)后系统的稳定裕度,发现使用GCRD方法进行回路成形后系统的稳定裕度明显提高。下面将针对ADS-33E中对于内回路控制器的飞行品质的其他要求进行对比验证。
1) 带宽验证
表1为考虑了执行机构和传感器特性的前提下,回路成形后内环的系统带宽与ADS-33E所规定的指标的对比。表2为w通道的响应速度校验结果。

表1 校验系统的带宽Table 1 Bandwidth evaluations for system
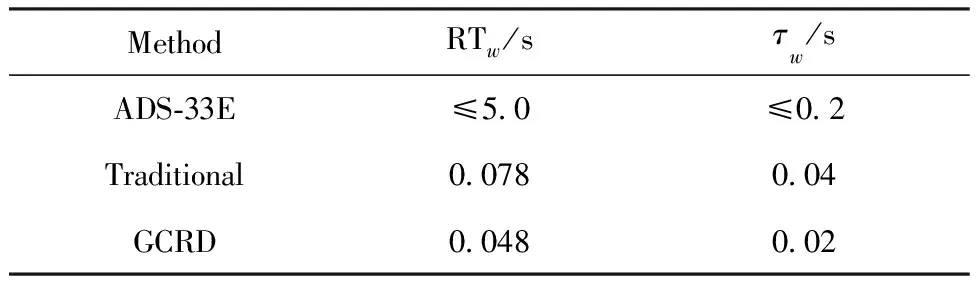
表2 校验系统的响应速度Table 2 Response speed evaluations for system
2) 解耦性验证
图10和图11分别为使用传统方法和使用GCRD方法成形后的系统的θ、φ和w通道分别加入5°、5°和1 m/s阶跃输入后的响应曲线。根据阶跃响应数据计算飞行品质中关于通道间耦合特性的指标,表3为回路成形后的系统的耦合性与ADS-33E所规定的指标的对比,由图10、图11和表3可看出,使用GCRD方法比用传统方法成
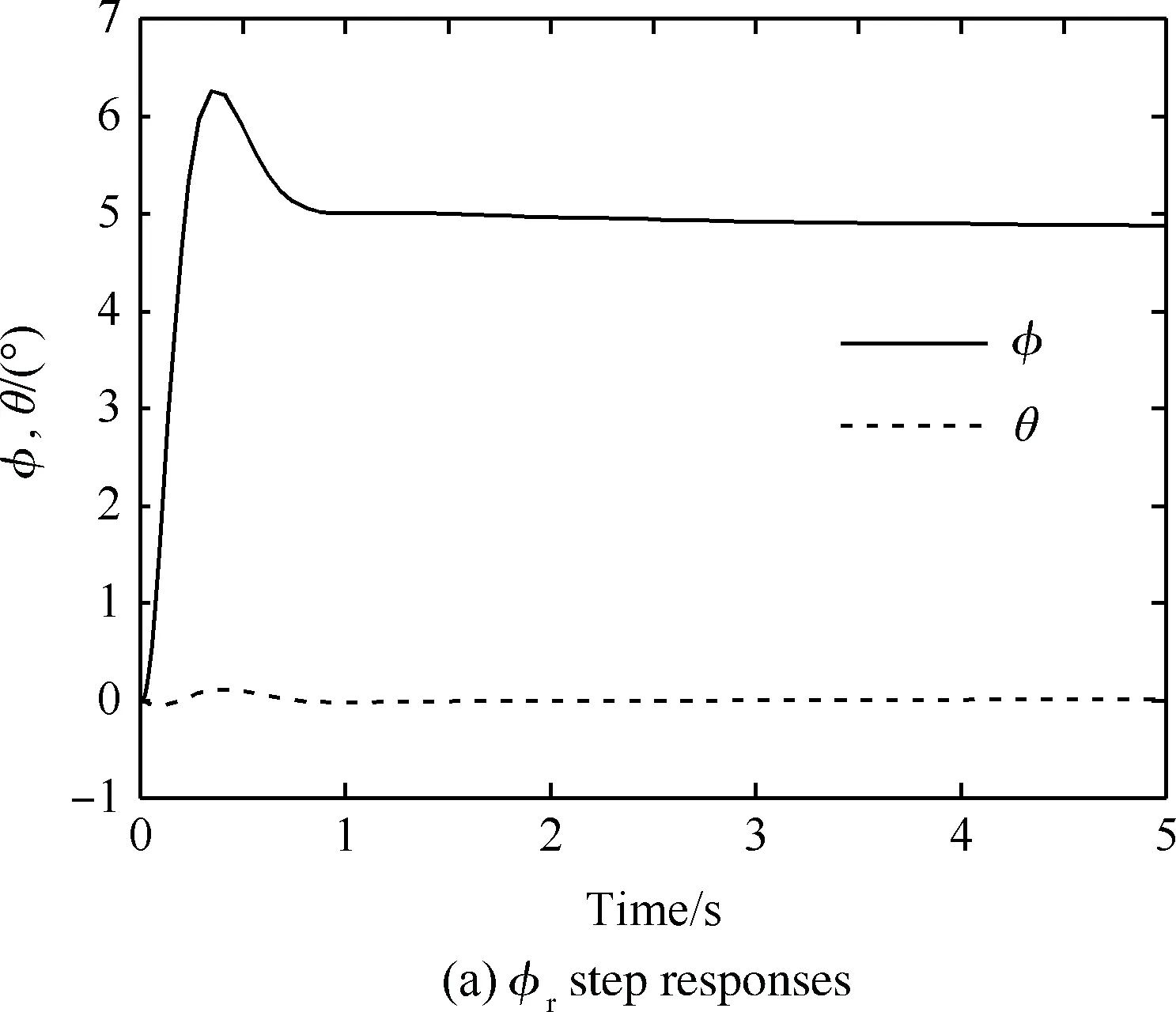

图10 系统耦合性的阶跃响应验证(传统方法)Fig.10 Step responses for inter-axis coupling evaluation(traditional method)



图11 系统耦合性的阶跃响应验证(GCRD方法)Fig.11 Step responses for inter-axis coupling evaluation (GCRD method)

表3 校验通道间的解耦Table 3 Inter-axis coupling evaluation
3) 扰动抑制验证
图12和图13分别为在使用传统方法和使用GCRD方法成形后的系统的θ、φ、w和r通道分别加入幅值为1、宽度为1 s的脉冲扰动输入后的响应曲线。由图可以明显看出,使用两种方法后的各通道的响应在10 s内都已经回到峰值的10%范围内,而且使用GCRD方法后的系统对扰动的恢复的时间比传统方法的更短,且振荡很小,说明使用GCRD方法后的系统对扰动的抑制更强。

图12 系统脉冲扰动响应(传统方法)Fig.12 Normalized responses to pulse disturbance (traditional method)
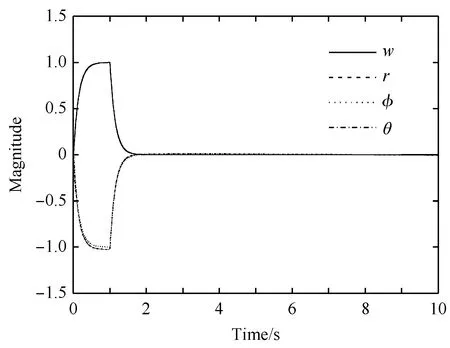
图13 系统脉冲扰动响应(GCRD方法)Fig.13 Normalized responses to pulse disturbance (GCRD method)
综上仿真比较可以看出,使用GCRD方法进行H∞回路成形后的系统比使用传统方法的前置和后置的对角型权值矩阵W1和W2成形后的系统的飞行品质更高,更能满足ADS-33E中对于内回路控制器的飞行品质的要求。
3 结 论
本文采用了频域辨识建模和H∞回路成形方法来设计无人直升机高带宽鲁棒控制器,其中重点研究了以下几个问题:
1) 根据飞行试验数据,采用频域系统辨识的方法得到无人直升机精确的动力学模型,以此模型为基础设计了高带宽鲁棒控制器。
2) 采用H∞回路成形方法设计无人直升机内环控制器,实现系统的解耦和姿态稳定,并保证控制系统具有高带宽。
3) 通过仿真验证,GCRD方法是解决H∞回路成形中权值矩阵选取的一种有效方法,使用此方法设计后的系统满足ADS-33E中关于一级飞行品质的所有要求。
[1] Kim H J, Shim D H, Sastry S. Flying robots: modeling, control and decision making. Proceedings of the 2002 IEEE International Conference on Robotics and Automation, 2002: 66-71.
[2] Roberts J M, Corke P, Buskey G. Low-cost flight control system for a small autonomous helicopter. Proceedings of the 2002 Australasia Conference on Robotics and Automation, 2002: 546-551.
[3] Shim D H, Kim H J, Sastry S. Decentralized nonlinear model predictive control of multiple flying robots. Proceedings of the 42nd IEEE Conference on Decision and Control, 2003: 3621-3626.
[4] Isidori A, Marconi L, Serrani A. Robust nonlinear motion control of a helicopter. IEEE Transactions on Automatic Control, 2003, 48(3): 413-426.
[5] Ekblad M.Reduced-order modeling and controller design for a high performance helicopter.Journal of Guidance, Control and Dynamics, 1990, 13(3):439-449.
[6] Enns R, Si J. Helicopter trimming and tracking control using direct neural dynamic programming. IEEE Transactions on Neural Networks, 2003, 14(4): 929-939.
[7] McFarlane D C, Glover K. A loop shaping design procedure using synthesis. IEEE Transactions on Automatic Control, 1992,37(6): 759-769.
[8] Baskett B J. ADS-33E, Aeronautical design standard performance specification handling qualities requirements for military rotorcraft. Alabama: United States Army Aviation and Missile Command, 2000.
[9] Liu P, Wu Z. Modified frequency identification method and its application in helicopter modeling. Control Theory & Application, 2011, 28(12): 1747-1753.(in Chinese)
刘鹏, 武哲.改进的频域辨识方法及其在无人直升机建模中的应用. 控制理论与应用, 2011, 28(12): 1747-1753.
[10] Tischler M B, Remple R K. Aircraft and rotorcraft system identification: engineering methods with flight test examples. Virginia: American Institute of Aeronautics and Astronautics Press, 2006: 25-53.
[11] Miller R H. A method for improving the inherent stability and control characteristics of helicopters. Journal of Aeronautical Sciences, 1950,17(6): 363-374.
[12] La Civita M, Papageorgiou G, Messner W. Design and flight testing of a high-bandwidthH∞loop shaping controller for a robotic helicopter. AIAA-2002-4836, 2002.
[13] Li W J. Robust control based on loop shaping. Harbin: Department of Control Science & Engineering, Harbin Institute of Technology, 2006. (in Chinese)
李卫江. 基于回路成形的鲁棒控制研究. 哈尔滨: 哈尔滨工业大学控制科学与工程系, 2006.
[14] Lanzon A. Weight optimization inH∞loop-shaping. Automatic, 2005, 41: 1201-1208.
[15] Le V X, Safonov M G. Rational matrix GCD’s and the design of squaring-down compensators—a state space theory. IEEE Transactions on Automatic Control, 1992,36(3): 384-392.
UnmannedHelicopterRobustControllerDesignBasedonAircraftFlyingQualitiesEvaluation
LIUPeng1,WANGQiang2,MENGZhijun1, *,WUZhe1
1.SchoolofAeronauticScienceandEngineering,BeihangUniversity,Beijing100191,China2.SchoolofAutomationScienceandElectricalEngineering,BeihangUniversity,Beijing100191,China
Arobustautomaticflightcontrolsystemisdesignedforasmallscaleunmannedhelicopterinthispaper.Wefirstapplysystemidentificationtothedesignofahigh-bandwidthcontrollerforrobotichelicopters.Theoverallconceptistoextractacompletesetofnon-parametricinput-to-outputfrequencyresponsesthatfullycharacterizethecoupledhelicopterdynamics,andthenapplyanonlinearsearchalgorithmforalinearhigh-fidelitysimulationmodelthatmatchesthefrequencyresponsedataset.TheH∞loop-shapingmethodisusedtodesigntheinnerloopoftheunmannedhelicopterbasedontheidentifiedmodel.Thegreatestcommonrightdivisors(GCRD)methodisemployedtomovethetransferfunctionmatrixfromtherealsystemtothetargetsystem,whichisaveryusefulwaytosolvethedifficultiesinchoosingaproperweightingmatrixinH∞loop-shaping.Comparedwiththetraditionalmethod,thesystemusingthenewmethodexhibitsalargerrobuststabilitymargin,andthedecouplingandthebandwidthofthesystemarealsoimprovedconsiderably.Furthermore,itreducesthecomplexityandblindnessforthedesignertofindtheproperweightingmatrix.ThesimulationresultsprovethattheunmannedhelicoptersystemachievesatoplevelcontrolperformancethatconformsrelevantrequirementsinmilitarystandardsADS-33E.
helicopter;robustcontrol;systemidentification;greatestcommonrightdivisors;H∞loop-shaping;aircraftflyingqualities
2011-12-28;Revised2012-03-12;Accepted2012-03-19;Publishedonline2012-05-201359
URL:www.cnki.net/kcms/detail/11.1929.V.20120520.1359.018.html
.Tel.:010-82338797E-mailmengzhijun@buaa.edu.cn
2011-12-28;退修日期2012-03-12;录用日期2012-03-19; < class="emphasis_bold">网络出版时间
时间:2012-05-201359
www.cnki.net/kcms/detail/11.1929.V.20120520.1359.018.html
.Tel.:010-82338797E-mailmengzhijun@buaa.edu.cn
LiuP,WangQ,MengZJ,etal.Unmannedhelicopterrobustcontrollerdesignbasedonaircraftflyingqualitiesevaluation.ActaAeronauticaetAstronauticaSinica,2012,33(9):1587-1597. 刘鹏,王强,蒙志君,等.基于飞行品质评估的无人直升机鲁棒控制器设计.航空学报,2012,33(9):1587-1597.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
1000-6893(2012)09-1587-11
V212.4; TP273
A
刘鹏男,博士研究生。主要研究方向:飞行力学,系统辨识,飞行控制。
Tel: 010-82338797
E-mail: lppl2008@163.com
王强男,博士研究生。主要研究方向:飞行控制。
Tel: 010-82338797
E-mail: teddywang_0929@126.com
蒙志君男,博士,讲师。主要研究方向:飞行器总体设计。
Tel: 010-82338797
E-mail: mengzhijun@buaa.edu.cn
武哲男,博士,教授,博士生导师。主要研究方向:飞行器总体设计,飞行器隐身设计。
Tel: 010-82338797
E-mail: wuzhe@buaa.edu.cn