放宽静稳定电传客机纵向短周期品质评定方法
2012-11-16周堃王立新谭详升
周堃, 王立新, 谭详升
北京航空航天大学 航空科学与工程学院, 北京 100191
放宽静稳定电传客机纵向短周期品质评定方法
周堃, 王立新*, 谭详升
北京航空航天大学 航空科学与工程学院, 北京 100191
民用客机强调飞行的安全性和舒适性,由于设计与使用的特点,其短周期模态的自然频率、操纵灵敏度与带宽均较低,时间延迟较大,且一般采用不同于军用运输机的控制律构型。提出以军用规范作为参照的电传客机飞行品质评定及适航审定方法,是现代民用客机飞行控制律设计的关键问题。为改善某放宽静稳定构型客机的短周期飞行品质,设计了迎角、C*和过载构型飞行控制律。按咨询通告AC25-7A所给出的操纵品质等级评定方法(HQRM),采用等效系统评定法、高阶频域法和高阶时域法评定了闭环飞机的短周期飞行品质及适航符合性。结果表明,军用规范条款对时延和带宽的限制对于客机可适当放宽。对于迎角构型,等效系统参数准则、带宽准则和俯仰速率响应准则均适用;过载构型评定应采用等效系统参数准则、俯仰速率响应准则;C*属非常规响应构型,应采用带宽准则和俯仰速率响应准则评定。
客机; 放宽静稳定性; 短周期模态; 飞行控制系统; 飞行控制律; 操纵品质; 控制律构型
短周期模态是飞机纵向运动的强模态,它决定了飞机的纵向稳定性与操纵性,该模态的改善是飞机飞行控制律设计及闭环操纵品质评定的重要内容。
大型民用客机与军用运输机在短周期特性的要求上存在一定差异。军用运输机的飞行剖面涉及空中加油、地形跟踪等A种飞行阶段,对操纵品质要求较高;民机无需完成这些高增益飞行任务,强调的是安全性和乘坐舒适性。因此,对于放宽静稳定性构型电传民机而言,其飞行控制律设计的思路与飞行品质评定的侧重点与军机有所差异。
电传客机适航审定的依据是适航条例。但其缺乏针对操稳特性的定量规定[1-5],不利于控制律的设计及优化。针对这一情况,美国联邦航空局(Federal Aviation Administration, FAA)试飞指南AC25-7A中提出了基于操纵品质等级评定方法(Handling Qualities Rating Method, HQRM)的适航审定方法[6],给出了民机适航符合性与军用规范MIL-STD-1797A飞行品质等级[7]之间的参考关系。然而,由于军民用两类飞机在操纵品质要求上的差异,现有军标中的一些条款及品质边界经修订后方可应用于民机的适航符合性审定。
本文以采用迎角、C*和过载3种控制律构型的放宽静稳定客机为研究对象,针对其不同的短周期响应特性,依照HQRM,分别采用低阶等效系统、高阶飞机频域响应和高阶飞机时域响应3种评定方法,开展了其短周期飞行品质的评定研究,研究结果对现代电传客机的飞行控制律设计与适航符合性评定等均具有一定的实用参考价值。
1 电传客机操纵品质的特点
放宽静稳定性电传客机的操纵品质呈现如下特点:
1) 闭环飞机短周期自然频率较低
放宽静稳定客机本体的纵向静稳定性较差,通常需通过设计电传控制系统来改善。但是,若对飞机静稳定性的过度补偿则会影响闭环系统的稳定裕度,还可能引发操纵舵面饱和等安全问题。因此,民机只要求适度增稳,允许闭环飞机的短周期自然频率较低。
2) 杆力灵敏度较低,等效延迟时间较大


图1 时延与杆力灵敏度的关系Fig.1 Relationship between time delay and stick force control sensitivity
3) 俯仰响应带宽要求较低
带宽表征闭环飞机复现快速变化的操纵指令的能力。为完成空中加油等需要连续施加精确操纵的机动任务,军用运输机的响应带宽较高,可复现快速变化的指令。在民机飞行剖面中,起降阶段对人机系统响应快速性的要求最高,但仍可通过缓慢的机动来完成,故民机对俯仰响应带宽的要求较低。
4) 闭环飞机响应类型不同于军用运输机
电传系统可根据不同阶段的要求剪裁飞机的操稳特性。为满足起降、空中加油、编队以及低空飞行等复杂飞行任务的需求,军用运输机的电传控制律采用常规、俯仰速率、过载、俯仰角和迎角等多种构型[9];电传客机纵向控制律的设计主要针对起降、巡航等非精确跟踪任务,通常采用迎角构型、过载构型和C*构型等。不同的响应类型应用于不同阶段,其操纵品质要求也有所差异。
2 民机操纵品质等级评定方法
现代客机采用电传系统,其飞行动力学特性、飞控系统失效形式均不同于常规客机,仅依照FAR25、CCAR25等规范开展适航审定是不够的[6]。针对此类飞机,应采用HQRM开展适航审定。
HQRM是基于飞控系统故障、大气扰动以及飞行包线等影响飞行安全事件(出现概率分别为Xc、Xa和Xe)的组合及其概率的定量适航验证方法,其中上述3种因素的组合概率的表达式为
X=XcXaXe
(1)
对于发生概率不同的事件,飞机应满足不同的品质等级要求,如表1[6]所示。X<10-9(每109飞行小时发生1次,下同)的事件是极不可能发生的,适航审定不予考虑。X>10-9时,应先计算XaXc,当XaXc介于1与10-5之间时,按较可能发生的事件(Probable Condition)归类;XaXc介于10-5和10-9之间时,则按不太可能发生的事件(Improbable Condition)归类。最后,按所考虑的大气扰动及飞行包线状态确定满足适航符合性的最低操纵品质等级。
表1中正常包线 (Normal Flight Envelope, NFE)、使用包线 (Operational Flight Envelope, OFE)和限制包线 (Limit Flight Envelope, LFE)分别表征客机正常运营、飞行状态偏离正常并触发告警和飞行状态处于包线边缘并触发包线保护功能的飞行状态。FAA操纵品质分为 “满意”(Satisfactory, SAT)、“可接受” (Adequate, ADQ)和“可控” (Controllable, CON) 3个品质等级。对于不同的飞行状态组合及其发生概率,可查表1确定满足适航符合性的最低操纵品质等级。电传系统采用余度配置,单个故障的发生概率与其对飞行安全的影响程度通常呈反比关系。综合考虑上述3个因素,对飞行安全影响较小的事件的出现概率较高,此时对操纵品质等级的要求也较高,反之只需满足较低的品质等级。
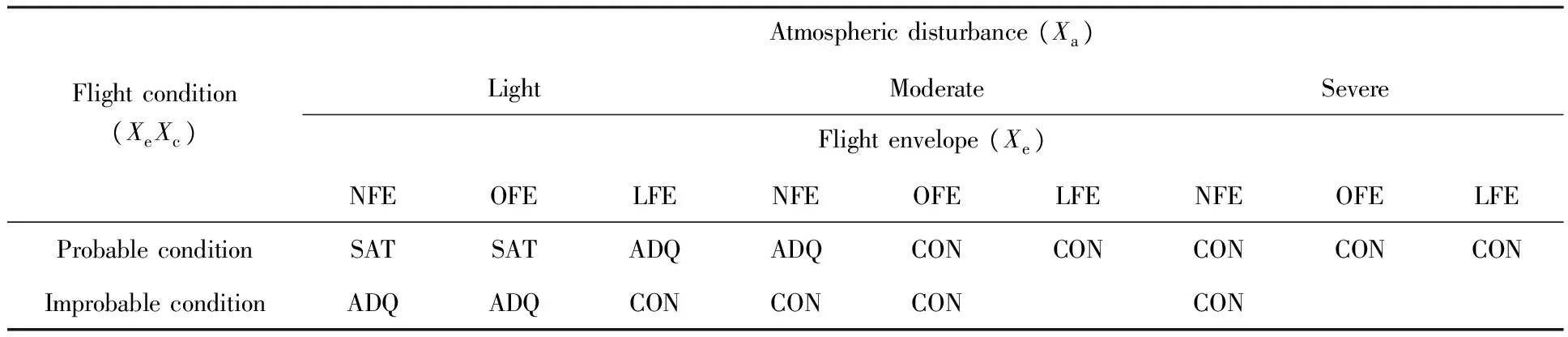
表1 最低操纵品质要求[6]Table 1 Requirements for minimum handling qualities[6]
为方便开展定量分析,给出了FAA操纵品质等级与Cooper-Harper评分、军用规范MIL-STD-1797A品质等级的对照关系,如表2所示。

表2 操纵品质评定对照关系Table 2 Handling qualities rating chart
综上,可借助军用规范中的定量边界,针对特定飞行状态及其组合概率,确定电传客机满足适航符合性的飞行品质定量要求。
3 高阶闭环飞机的短周期品质评定方法
FAR25 B分部仅对民用飞机的短周期阻尼做出了重阻尼的要求(短周期振荡幅值须在2个周期内衰减至初始值的1/10,相当于阻尼比ζsp=0.20)。放宽静稳定客机本体受扰后姿态回复较慢,在大迎角状态下易危及飞行安全。对此,行业标准ARP4104[10]也只作了“短周期响应不应过于迟钝或过于灵敏”的建议。可见民机设计及审定时,对短周期模态的要求较模糊。相较之下,MIL-STD-1797A规范[7]中电传飞机该模态特性的要求较为全面及详尽,共给出了3类评定方法,6个准则,可供电传客机设计参考。
3.1 等效系统评定方法

CAP准则针对闭环飞机姿态与轨迹的运动关系、短周期动稳定性、时延以及纵向静操纵性等多方面进行评定。等效系统参数准则采用ωnspTθ、ζsp和τθ等参数开展评定[7-8](品质边界图可参见算例部分),反映了闭环飞机短周期运动中姿态与轨迹变化的关系:ωnsp越大,飞机的初始姿态响应越急剧,反之则越迟钝;Tθ越大,姿态与轨迹响应的分离越明显,俯仰姿态初始响应也显得越急剧。此外,该准则还评定ζsp、ωnsp和τθ等参数,意在保证理想的短周期阻尼、频率及时延特性。虽然评定时未涉及过载灵敏度n/α、操纵力梯度Fe/nz等参数,评定内容不及CAP准则全面,但原理相近,且流程简单,故拟采用该准则进行评定。
3.2 高阶系统频域方法
对于非常规响应类型的飞机,等效拟配的失配度较大,应直接针对高阶飞机的响应特性来评定其短周期品质。
带宽准则和闭环准则属高阶系统频域评定方法。其中,带宽准则主要针对闭环飞机,考查人机系统复现快速变化指令的能力;闭环准则针对人机闭环系统,重点考虑其动稳定性。在起降状态,电传客机对跟随操纵指令的要求比其他飞行状态更高,故本文拟采用带宽准则来进行评定。
带宽ωBW表征驾驶员施加操纵时,在同时满足6 dB、45°稳定裕度的前提下,人机闭环系统能够复现的快速变化的俯仰姿态指令的最大频率[11];τp表征闭环飞机高频段相位滞后对人机系统稳定裕度的影响,与等效延迟时间τθ相似。综上,带宽准则在兼顾人机系统稳定性的同时,通过规定可接受的最小ωBW和最大τp(包络图见算例)确保闭环飞机能快速跟随操纵指令。
3.3 高阶系统时域方法
俯仰速率准则和Gibson准则[7-8]属高阶系统时域评定方法。其中,俯仰速率准则主要针对巡航和起降状态闭环飞机的俯仰速率响应;Gibson准则主要针对高机动性飞机精确跟踪和场域阶段的跟踪及回落特性,但未给出飞行品质等级的量化边界。综上,前者与电传客机的使用及设计特点较吻合,故采用此准则来进行评定。

4 电传客机建模
基于波音747-100飞机[12],将机翼前移1 m,平尾面积减小约40 m2,以减小其稳定裕度。表3示出了进近状态(马赫数Ma=0.2、海平面、着陆构型)和巡航状态(Ma=0.5、高度6 096 m、干净构型)下,放宽静稳定性(Relaxed Static Stability, RSS)前后飞机短周期频率ωnsp及CAP的变化。
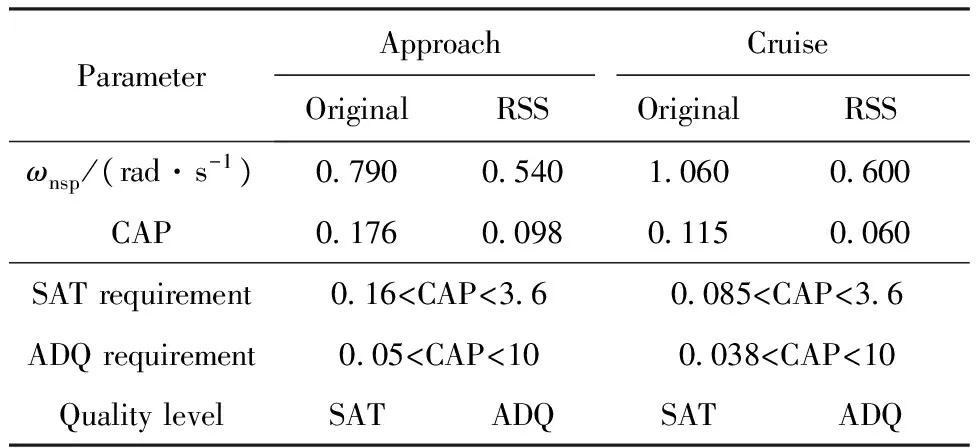
表3 本体CAP等级评定Table 3 Gradings of bare airframe CAP
可见随着纵向静稳定裕度的减小,进近和巡航状态飞机本体的短周期自然频率ωnsp分别下降为0.54 rad/s、0.60 rad/s,CAP也由“满意”等级下降为“可接受”等级,不满足HQRM对正常状态下飞行品质等级的要求。
为改善短周期飞行品质,参照空客A320飞机的纵向飞行控制律[13],设计了C*、法向过载nz和迎角α3种构型的飞行控制律,如图2所示。图中:KP和KI分别为控制律比例增益和积分增益;KS为水平安定面配平增益;Kq为俯仰阻尼器增益;KδeC*、Kδenz和Kδeα分别为C*、过载和迎角增稳反馈增益;δH和δe分别为水平安定面偏度和升降舵偏角。
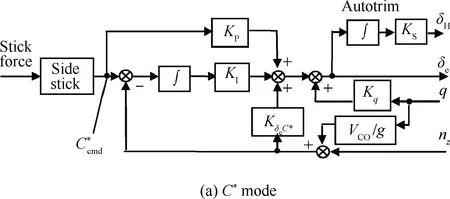
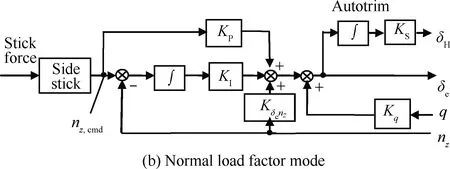

图2 纵向飞行控制律结构图Fig.2 Structure of longitudinal flight control laws
飞机处于低速飞行状态时,q是纵向运动与驾驶员所感受的主要变量,控制律采用C*构型如图2(a)所示。C*=Δnz+(VCO/g)q是法向过载增量Δnz和q的混合变量,交叉速度VCO(此处取为120 m/s)与重力加速度g表征了C*指令中过载与俯仰速率的比例,当空速V=VCO时,C*指令中两部分的幅值相等。控制律的内回路由俯仰阻尼器和增稳反馈回路组成;外回路由比例-积分通道和侧杆指令成形环节组成(杆力梯度取为50 N/g[7, 14-15],各构型同),提供控制增稳功能。自动配平环节对升降舵舵偏增量Δδe进行积分,通过平尾偏转δH卸除升降舵的铰链力矩。
飞机处于中高速巡航飞行状态时,nz是纵向运动与驾驶员感受的主要变量,此时控制律采用过载构型(见图2(b))。其结构与C*控制律类似,只是增稳反馈和机动指令回路的反馈信号为nz,杆力指令与过载对应。
迎角构型控制律如图2(c)所示,主要用于速度过低、迎角过大时的飞行包线保护。其结构与前两种构型的控制律类似,增稳反馈和指令反馈信号为迎角,该控制构型不具备自动配平功能。
对于3种控制构型,可根据操纵品质的设计要求,通过飞机本体运动模型的短周期简化,求取闭环飞机响应对杆力指令的传递函数,并进行零极点配置,来完成控制律的调参设计[13]。
5 评定算例
由于所评定的飞行状态(进近及巡航)均处于正常包线内,飞控系统处于正常工作状态,不考虑大气扰动对短周期模态特性的影响 (大气扰动可视为对短周期模态的激励,对短周期特性的实际影响很小),故满足适航符合性的最低操纵品质等级应按“正常包线+轻微大气扰动+较可能发生的事件”的组合确定,也即飞行品质应是“令人满意的”。
5.1 迎角构型闭环品质评定
在电传客机的3种控制构型中,迎角构型下闭环飞机的响应特性与常规飞机最接近(飞机处于进近状态,如图3所示)。该构型用于包线保护,应能快速跟随操纵杆生成的迎角指令。控制律按ζsp=0.7、ωnsp=1.5 rad/s调参。实际飞机的本体运动特性由4阶线化运动方程表征[12],升降舵特性以惯性环节表征。
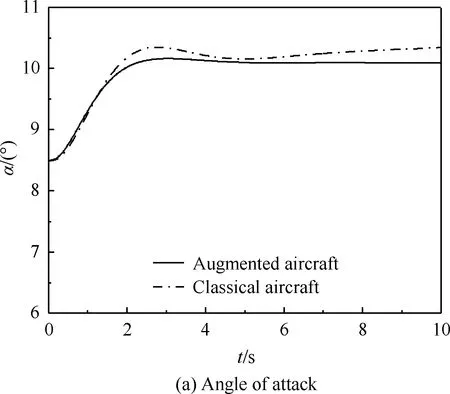
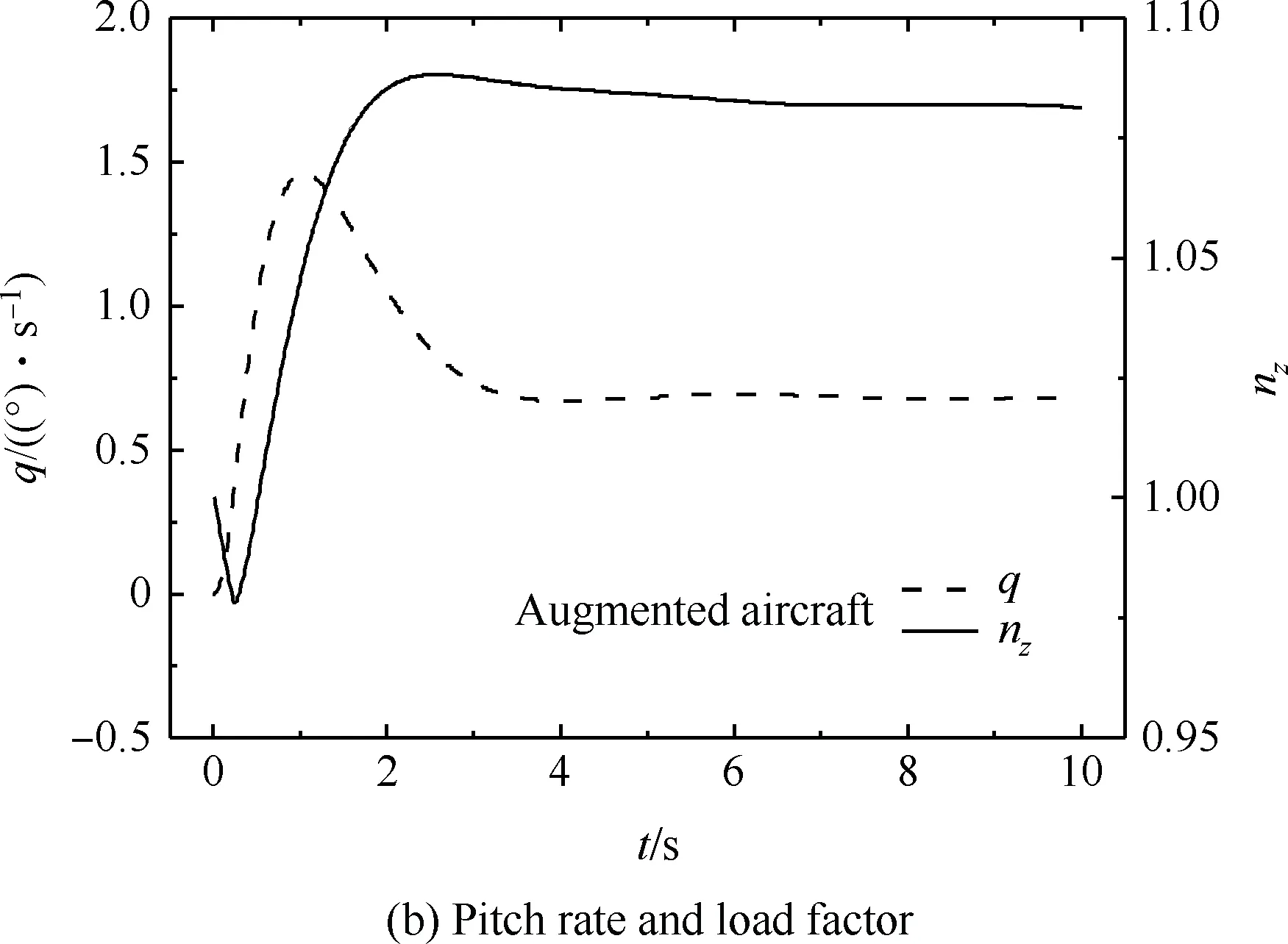
图3 闭环飞机(迎角构型)俯仰轴阶跃响应Fig.3 Pitch axis step-response with augmented aircraft (angle of attack mode)
1) 等效系统方法评定
拟配结果为
(2)
式中:Fe为纵向操纵力,N。等效参数ζsp=0.80、ωnspTθ=2.57,操纵品质等级为“满意”,如图4所示。对应的延迟时间为0.14 s,若简单按照军标评定,仅达到“可接受”等级。MIL-STD-1797A[7]给定的延迟时间等级并未考虑杆力灵敏度与等效时延的关系[8, 16]。由等效ωnsp=

图4 迎角控制构型下的短周期评定结果(进近状态)Fig.4 Short term pitch response rating of angle of attack control mode (power approach)
1.36 rad/s,可知杆力灵敏度较低,等效时延限制应适当放宽。针对运输类飞机,文献[16]将“满意”、“可接受”、“可控”等级的边界分别划为τθ<0.20 s、τθ<0.27 s、τθ<0.43 s。故迎角构型闭环飞机最终满足“满意”等级。
2) 带宽准则评定
根据迎角构型闭环飞机俯仰姿态角θ对纵向操纵力的频响曲线,可得闭环飞机的ωBW=1.68 rad/s、τp=0.11 s。若按军标边界,闭环飞机进近时ωBW不得低于2.5 rad/s,τp不得超过0.1 s[7]。所设计的电传控制律显然不满足上述要求。
由控制增稳的原理可知,提高带宽的直接方法是通过增稳提高ωnsp。对于静稳定度较小的民用客机,仅追求提高带宽容易导致短周期阻尼恶化和大幅值操纵时的舵面饱和。文献[17]指出,2.5~3.0 rad/s的带宽已足以保证军用运输机顺利完成空中加油等精确跟踪类飞行任务;电传客机的飞行剖面无此类任务,对带宽的要求显然不会高于前者,故应适度放宽带宽及时延边界。文献[18]将起降阶段带宽“满意”边界放宽至1.3 rad/s,并放宽了时延限制,如图5所示。采用新边界后,闭环飞机的短周期品质最终达到了“满意”等级。

图5 进近状态下的带宽及时延等级(迎角构型)Fig.5 Bandwidth and time delay grading of power approach (angle of attack mode)
3)俯仰速率准则评定

图6 俯仰角加速率对杆力的频响曲线(迎角构型)Fig.6 Frequency response of pitch acceleration to stick force (angle of attack mode)
表4 迎角构型闭环飞机的俯仰速率阶跃响应评定
Table4Pitchrateresponseratingsofaugmentedaircraft(angleofattackmode)

综上,闭环飞机俯仰速率阶跃响应的特征参数均满足HQRM品质评定的“满意”等级。3条准则的评定结果均表明迎角构型闭环飞机满足适航符合性要求。
5.2 过载构型闭环品质评定
由于迎角与升力之间存在近似线性的关系,高速飞行时控制法向过载与控制飞行迎角相近,因此过载构型闭环飞机的响应特性也与常规飞机相近。控制律按ζsp=0.65、ωnsp=1.5 rad/s调参。巡航状态下闭环飞机对阶跃杆力的响应如图7所示。
巡航状态以缓和机动为主,并不强调操纵响应的快速性。故不采用带宽准则评定(该准则也缺乏此飞行状态的品质边界),只用等效系统参数准则与俯仰速率准则评定。
1) 等效系统参数评定
经拟配得,ζsp=0.61、ωnsp=1.68 rad/s、Tθ=2.47 s、τθ=0.103 6 s。等效参数评定结果如图8所示。
图7 闭环飞机(过载构型)的俯仰轴阶跃响应Fig.7 Pitch axis step-response with augmented aircraft (load factor mode)
图8 过载构型下的短周期评定结果Fig.8 Short periodic pitch response rating of load factor mode
由图8可见,闭环飞机各响应参数均达到“满意”等级。
2) 俯仰速率准则评定
总之,闭环飞机俯仰速率阶跃响应的特征参数均满足HQRM品质评定的“满意”等级。综上,过载构型闭环飞机也满足适航符合性要求。
5.3 C*构型闭环品质评定
飞机处于进近状态,控制律按ζsp=0.7、ωnsp=2.0 rad/s调参。闭环飞机的阶跃响应如图9所示。
表5过载构型闭环飞机的俯仰速率阶跃响应
Table5Pitchrateresponseofloadfactormodeaugmentedaircraft


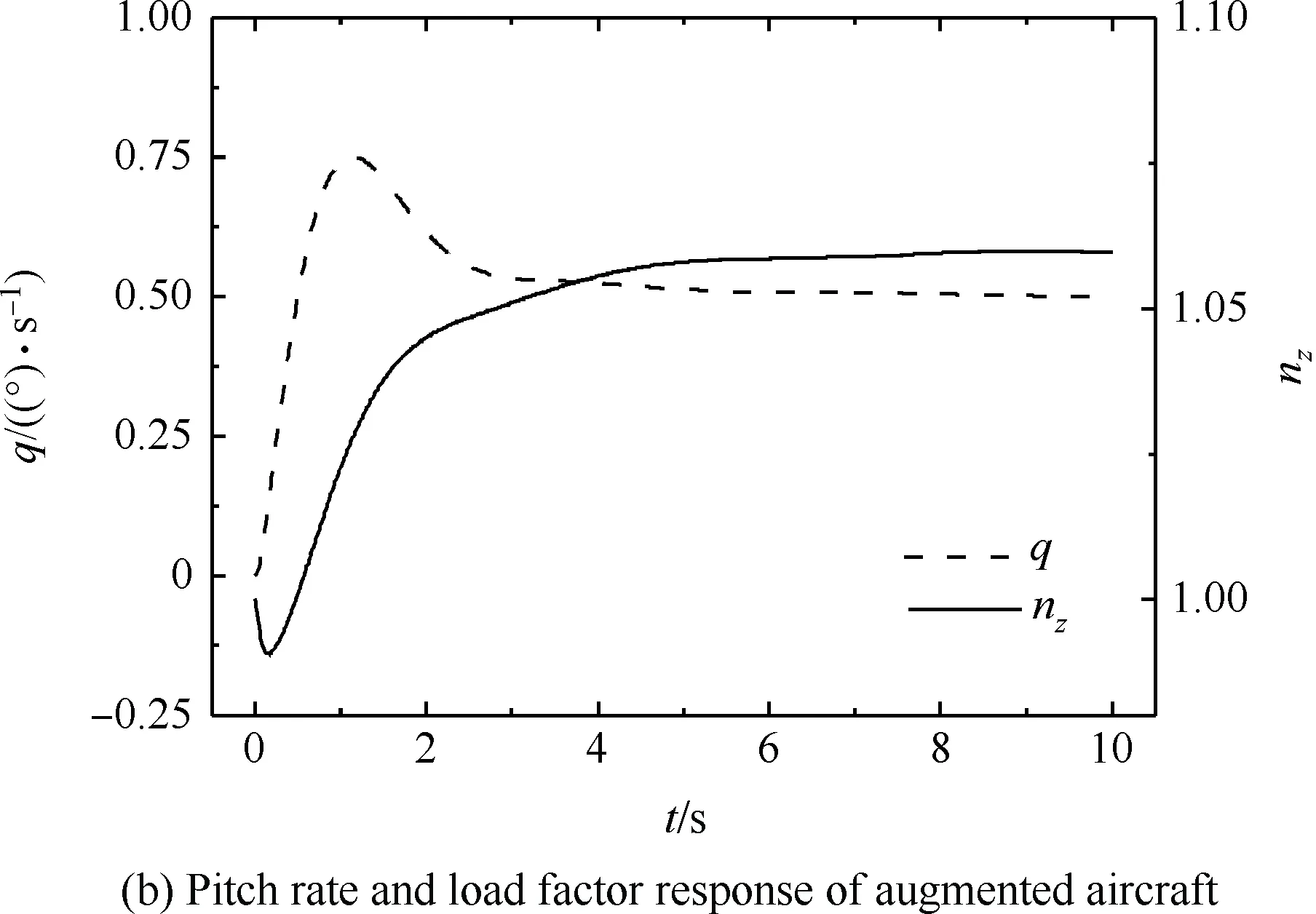
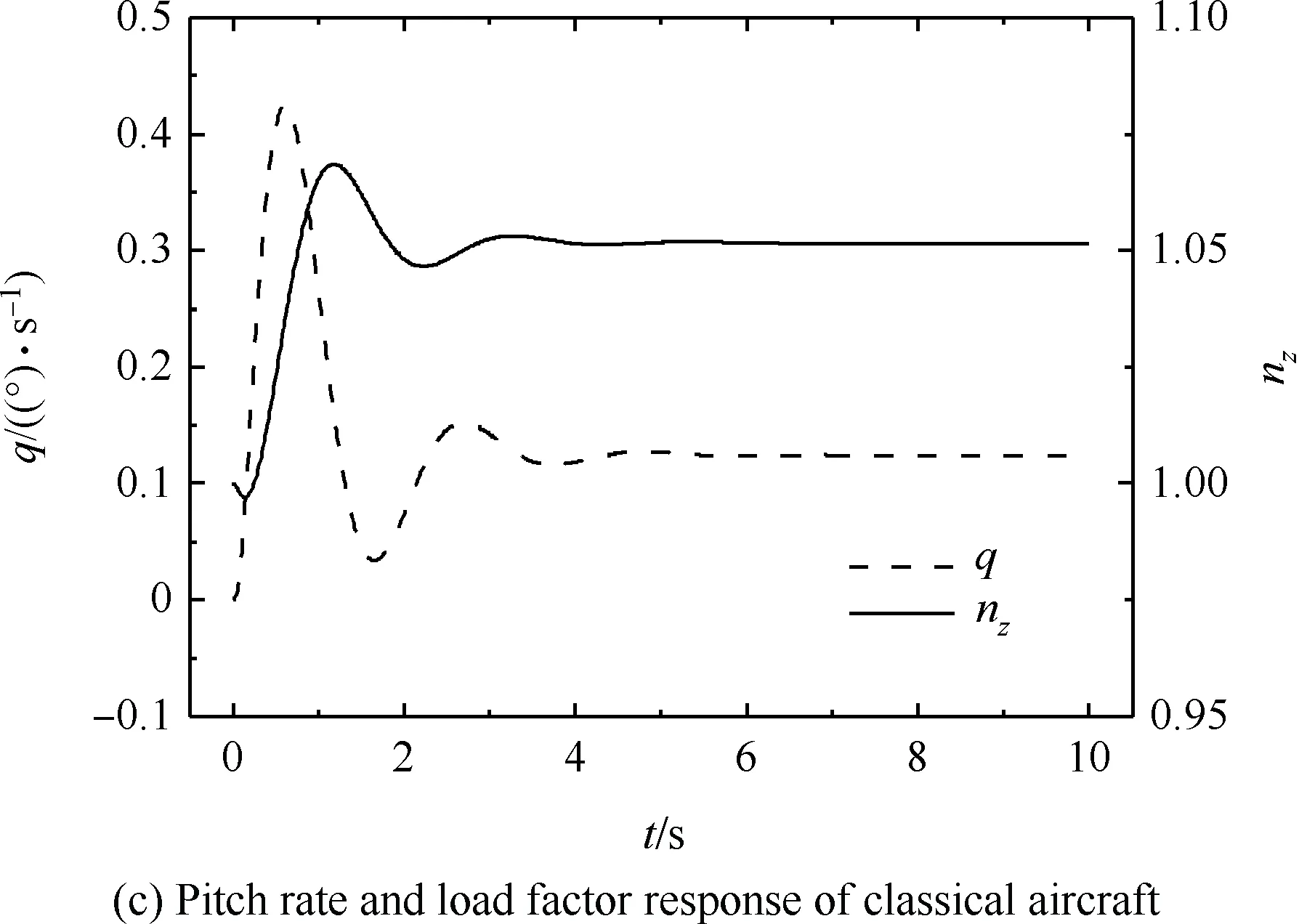
图9 C*构型闭环飞机与常规飞机的俯仰阶跃响应Fig.9 Pitch axis step response with augmented aircraft (C* mode) and classical aircraft
C*是nz与q的混合变量,飞机以低于VCO的速度定常拉升时,q分量占优。为保证理想的C*响应特性(见图9(a)),q上升时间短且超调量大, 响应存在明显滞后且无超调 (见图9(b));而常规飞机nz与q响应均存在超调,且nz响应的滞后时间较短(见图9(c))。可见,C*闭环飞机具有非常规响应特性,等效拟配的失配度较大,应采用带宽准则和俯仰速率准则评定。
1) 带宽准则评定
根据C*构型闭环飞机θ对Fe的频响特性,计算得闭环飞机的ωBW=2.02 rad/s、τp=0.103 s,在适度放宽带宽和时延要求后,其短周期特性满足起降状态的“满意”等级要求[18](边界参见图5)。
2) 俯仰速率准则评定
表6C*构型闭环飞机的俯仰速率阶跃响应
Table6Pitchrateresponseofaugmentedaircraft(C*mode)

总之,闭环飞机俯仰速率阶跃响应的特征参数均满足HQRM品质评定的“满意”等级。综上,C*构型闭环飞机满足适航符合性要求。
6 结 论
1) 电传客机操稳特性应满足的基本要求是适航条例,其短周期飞行品质的评定应按照操纵品质等级评定方法开展。在典型飞行状态点上,闭环飞机的操纵品质应达到“满意”,对应的军标等级为1级。
2) 电传客机飞行品质的设计要求低于军用运输机。因此采用MIL-STD-1797A的准则评定时,应适当降低闭环飞机响应时延和人机系统闭环带宽等要求。
3) 电传客机在不同的飞行阶段采用了C*、法向过载和迎角3种不同构型的飞行控制律,在具体评定条款的选择上有所差异。
4) 采用迎角控制律时,闭环飞机的响应特性与经典飞机最为接近,且此时飞机通常处于起降阶段,故适于采用等效系统方法、带宽准则和俯仰速率准则进行评定;过载控制律主要用于巡航阶段,闭环飞机响应特性也接近于常规飞机,等效系统方法和俯仰速率方法较适用;C*控制律主要用于低速阶段,闭环飞机响应特性与经典飞机有较大不同,难于获得理想的等效系统模型,适于采用带宽准则、俯仰速率准则等直接针对高阶飞机的评定条款。
[1] Abzug M J, Larrabee E E. Airplane stability and control: a history of the technologies that made aviation possible. 2nd ed. Cambridge: Cambridge University Press, 2002: 32.
[2] Federal Aviation Administration. FAR-25: airworthiness standard: transport category airplanes. Washington D. C.: Federal Aviation Administration, 1968: Subpart B- Flight.
[3] Joint Aviation Authority. JAR25: joint aviation requirement. Cologne, Germany: Joint Aviation Authority, 1994: Section 1-Requirements, Subpart B-Flight.
[4] Wang L X. Airworthiness regulation, flying qualities specifications and design criterions. Flight Dynamics, 2000, 18(2): 1-4. (in Chinese)
王立新. 适航性条例、飞行品质规范和设计准则.飞行力学, 2000, 18(2): 1-4.
[5] Civil Aviation Authority of China. CCAR25-R4: China civil aviation regulation: part 25: airworthiness standards: transport category airplanes. Beijing: Civil Aviation Authority of China, 2009: Subpart B-Flight. (in Chinese)
中国民用航空局. CCAR25-R4 中国民用航空规章第25部: 运输类飞机适航标准. 北京: 中国民用航空局, 2009: B分部-飞行.
[6] Federal Aviation Administration. AC No.25-7A. flight test guide for certification of transport category airplanes. Washington D.C.: Federal Aviation Administration, 1998: Appendix 7.
[7] U.S. Department of Defense. MIL-STD-1797A flying qualities for piloted airplanes. Arlington: U.S. Department of Defense, 1990.
[8] Gao J Y, Li L Y, Feng Y C. Aircraft handling qualities. Beijing: National Defence Industry Press, 2003: 77-81. (in Chinese)
高金源, 李陆豫, 冯亚昌. 飞机飞行品质. 北京: 国防工业出版社, 2003: 77-81.
[9] An G. Analysis of control law modes and development techniques for advanced civil aircraft. Compilation of the Symposium on Active Control Technologies and Control Law Development Techniques. Xi’an: First Aircraft Institute, 2005: 57-70. (in Chinese)
安刚. 先进民机电传控制律构型和设计方法分析.主动控制与控制律设计技术研讨会文集. 西安: 中航第一飞机研究院, 2005: 57-70.
[10] Society of Automotive Engineers. ARP4104: design objectives for handling qualities of transport aircraft. Warrendale: Society of Automotive Engineers, 2007: 8-9.
[11] Sun H Z. Principles of automatic control. Rev. version. Beijing: Central Broadcasting and Television University Press, 1994: 117. (in Chinese)
孙虎章. 自动控制原理. 修订版. 北京: 中央广播电视大学出版社, 1994: 117.
[12] Etkin B, Reid L D. Dynamics of flight: stability and control. 3rd ed. New York: John Wiley and Sons Inc., 1996: 369-372.
[13] Brockhaus R. Flugregelung. Jin C J, translated. Beijing: National Defense Press, 1999: 494-498. (in Chinese)
鲁道夫布罗克豪斯. 飞行控制. 金长江, 译. 北京: 国防工业出版社, 1999: 494-498.
[14] Hanke D, Herbst C. Active sidestick technology: a mean for improving situational awareness. Aerospace Science Technology, 1999, 3(8): 525-532.
[15] Airbus Industrie. A320 flight crew operating manual vol. 1: flight control. Blagnac Cedex: Airbus Industrie, 1998.
[16] Rossitto K F, Hodgekinson J. Longitudinal and lateral-directional flying qualities investigation of high-order characteristics for advanced-technology transports. AIAA-1993-3815, 1993.
[17] Iloputaife O I, Svoboda G J, Bailey T M. Handling qualities design of the C-17A for receiver-refueling. AIAA-1996-3746, 1996.
[18] Mitchell D G, Doman D B, Key D L, et al. The evolution, revolution, and challenges of handling qualities. AIAA-2003-5465, 2003.
HandlingQualitiesAssessmentofShortPeriodModeforFly-by-WirePassengerAirlinerwithRelaxedStaticStabilityDesign
ZHOUKun,WANGLixin*,TANXiangsheng
SchoolofAeronauticScienceandEngineering,BeihangUniversity,Beijing100191,China
Thehandlingqualitiesdesignofafly-by-wirepassengerairlinerplacesgreatemphasisonsafetyandcomfort.Lowershortperiodfrequency,controlsensitivity,bandwidthandhighertimedelayareexpectedonairlinersduetoitsdesignandoperatingcharacteristics.Moreover,thecontrollawdesignsdifferfrommilitaryairliftaircraft.Developingahandlingqualitiesandairworthinessassessmentmethod,whichtakemilitarystandardsasreference,iscrucialtotheflightcontrollawdesignforapassengeraircraft.InthispaperaflightcontrollawwithC*mode,loadfactormodeandangleofattackmodearedevelopedtoimprovetheshortperiodhandlingqualitiesofarelaxedstaticstabilitypassengerjet.Handlingqualitiesandairworthinessassessment,basedonhandlingqualitiesratingmethod(HQRM)fromadvisorycurriculumAC25-7A,isusedtoexaminetheshortperiodhandlingqualitiesoftheaugmentedairplane.Loworderequivalentsystemsmethod,bandwidthcriterionandpitchrateresponsecriterionareusedintheassessment.Resultsindicatethattimedelayandbandwidthrestrictionsfrommilitaryspecificationsshouldberelaxedwhenappliedtopassengeraircraft.Forconventionalresponsetypesuchastheangleofattackmode,allthreecriteriaareapplicable.Loworderequivalentsystemsandpitchratecriteriaaresuitableforloadfactormode.C*modefeaturesanunconventionalresponsetype,thusonlybandwidthandpitchrateresponsecriteriaareapplicable.
passengeraircraft;relaxedstaticstability;shortperiodmode;flightcontrolsystem;flightcontrollaw;handlingqualities;controlmode
2011-12-30;Revised2012-01-18;Accepted2012-04-08;Publishedonline2012-04-171002
URL:www.cnki.net/kcms/detail/11.1929.V.20120417.1002.003.html
.Tel.:010-82338821E-mailbhu_wlx@tom.com
2011-12-30;退修日期2012-01-18;录用日期2012-04-08; < class="emphasis_bold">网络出版时间
时间:2012-04-171002
www.cnki.net/kcms/detail/11.1929.V.20120417.1002.003.html
.Tel.:010-82338821E-mailbhu_wlx@tom.com
ZhouK,WangLX,TanXS.Handlingqualitiesassessmentofshortperiodmodeforfly-by-wirepassengerairlinerwithrelaxedstaticstabilitydesign.ActaAeronauticaetAstronauticaSinica,2012,33(9):1606-1615. 周堃,王立新,谭祥升.放宽静稳定电传客机纵向短周期品质评定方法.航空学报,2012,33(9):1606-1615.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
1000-6893(2012)09-1606-10
V212.1
A
周堃男, 博士研究生。主要研究方向: 电传客机飞行控制及飞行品质。
Tel: 010-82338821
E-mail: zhoukun@ase.buaa.edu.cn
王立新男, 博士, 教授, 博士生导师。主要研究方向: 飞行力学与飞行控制。
Tel: 010-82338821
E-mail: bhu_wlx@tom.com
谭祥升男, 博士研究生。主要研究方向: 飞行力学与飞行试验。
E-mail: tanxiangsheng@sina.com