挠性航天器的退步直接自适应姿态跟踪控制
2012-11-16刘敏徐世杰韩潮
刘敏, 徐世杰, 韩潮
北京航空航天大学 宇航学院, 北京 100191
挠性航天器的退步直接自适应姿态跟踪控制
刘敏, 徐世杰*, 韩潮
北京航空航天大学 宇航学院, 北京 100191
针对参数不确定的挠性航天器姿态跟踪控制问题,提出了一种退步直接自适应控制算法。首先验证了挠性航天器动力学子系统的近似严格正实性,并设计了具有理想控制性能的参考模型;然后对以姿态四元数描述的运动学子系统设计常系数输出反馈中间控制律,使航天器姿态四元数输出渐近跟踪参考模型输出;最后退一步,对具有参数不确定特性的动力学子系统,基于非线性直接自适应控制理论和Lyapunov稳定性理论,设计了退步直接自适应姿态跟踪控制器,并证明了闭环系统的稳定性。仿真结果表明,所提控制方法能有效抑制挠性附件的振动,对挠性航天器的控制是有效的。
挠性航天器; 不确定性; 姿态控制; 退步控制; 非线性直接自适应控制; 正实性
现代航天器通常带有太阳能电池帆板、空间机械臂、天线、桁架等大型挠性部件,这些部件的振动与航天器的姿态运动产生耦合会影响航天器姿态控制的精度,甚至会危害到航天器的正常运行[1]。所以近几十年来,大型挠性航天器的姿态控制一直是航天领域研究的热点之一。针对此问题,专家们提出了诸如基于状态变量的 Riccati方程方法[2]以及滑模变结构控制等[3-4]控制方法,然而上述方法均依赖航天器的参数信息,或需设计模态观测器[4]。而挠性航天器具有因燃料消耗以及太阳帆板、机械臂等机构的运动而造成的系统参数不确定性,挠性部件模态坐标维数高不可直接用于控制器设计的特点,所以上述控制方法较难满足参数不确定挠性航天器的姿态控制精度要求。
直接自适应控制(Direct Adaptive Control)是由Sobel等[5]首先提出的一类基于参考模型的自适应控制方法。其结构简单、不依赖被控对象参数、能实现低阶控制器对高阶甚至任意阶被控对象的控制,且闭环系统稳定性仅依赖被控对象的近似严格正实(Almost Strictly Positive Real, ASPR)[6]性,因而在挠性空间结构控制领域得到广泛的研究[7-9],但直接自适应控制在航天器姿态控制领域的研究受到航天器系统的强非线性和非近似严格正实性的限制。虽然文献[10]和文献[11]研究了刚体航天器的直接自适应姿态控制,但是他们并没有考虑挠性部件振动对航天器姿态控制的影响,也没有分析航天器系统的近似严格正实性。
退步控制方法是由Kanellakopoulos等[12]首先提出并广泛应用于线性系统以及非线性系统的一类递推控制器设计方法,其最大的特点为可以将高相对阶被控对象分解成低相对阶子系统并设计递推控制器[13-14]。本文利用退步控制方法处理高相对阶被控对象的灵活性,将非近似严格正实的挠性航天器系统分解成低相对阶的动力学子系统以及非线性的运动学子系统,并验证了动力学子系统的近似严格正实性,然后基于非线性直接自适应控制理论[15]和退步控制方法,设计了挠性航天器的退步直接自适应姿态跟踪控制器。通过对不同仿真初始值下的仿真结果进行分析和比较,验证了该控制器可有效抑制挠性振动并实现对参数不确定挠性航天器的有效控制。
1 问题描述
挠性航天器姿态动力学方程可以描述为[16]
(1)
(2)
式(1)和式(2)分别为挠性航天器的转动方程和挠性部件振动方程。式中:I为挠性航天器转动惯量;ω=[ωxωyωz]T为本体系下描述的航天器姿态角速度;F为耦合系数矩阵;Tb为在本体系下描述的姿态控制力矩;η=[η1η2…ηi]T为模态坐标列阵;ξf=[ξ1ξ2…ξi]T为阻尼矩阵;ωf=[ω1ω2…ωi]T为模态频率矩阵;i为挠性模态阶数,通常情况下i值较大。假设上述参数中航天器的转动惯量I、挠性信息F、ωf以及ξf均具有不确定性,不能直接用于控制器设计,而ω的反对称矩阵为
(3)
当航天器姿态敏感器与执行机构同位安装时,动力学子系统的输出为姿态角速度ω,挠性航天器动力学子系统的状态方程为
{

(4)
式中:
Ei为适当维数的单位矩阵;0为适当维数的零矩阵。由于I、F、ωf以及ξf均为不确定参数,所以式(4)中的系数Ap、Bp均不确定,不能直接用于控制器设计。


(5)
参数不确定挠性航天器姿态跟踪问题可以描述为:对于给定的期望姿态角速度以及期望姿态四元数,设计不依赖航天器参数的控制律u,使航天器实现从初始姿态对期望姿态的渐近跟踪。
2 近似严格正实性
近似严格正实性是直接自适应控制理论中一个非常重要的定义,由指令发生跟踪器(Command Generator Tracker, CGT)理论[6]以及非线性直接自适应控制理论[11-12]可以得知,线性系统{A,B,C}满足近似严格正实性条件,则系统在直接自适应控制作用下,能实现对理想输出的理想跟踪。对于正实性有以下定义与引理[9]:
定义1对于线性系统{A,B,C},如果存在正定对称阵P以及正定阵Q,满足Kalman-Yacubovic条件
{
ATP+PA=-Q
BTP=C
(6)
则称线性系统{A,B,C}为严格正实的,其传递函数为严格正实函数。

{

(7)
为严格正实的,则称线性系统{A,B,C}为近似严格正实的,其传递函数为近似严格正实函数。
引理1对于传递函数为G(s)=C(sE-A)-1B的最小相位线性系统{A,B,C},若满足CB>0,则系统{A,B,C}为近似严格正实的,其传递函数为近似严格正实函数。
对于敏感器与执行机构同位安装的挠性航天器,其动力学方程式(4)中的线性部分{Ap,Bp,Cp}为最小相位系统,且有
(8)
式中:M为挠性航天器广义质量阵的逆矩阵,由式(4)中M的定义可得出M为正定对称阵。所以对于{Ap,Bp,Cp}有CpBp>0,由引理1可知挠性航天器动力学子系统中{Ap,Bp,Cp}满足近似严格正实性条件,其传递函数为近似严格正实函数。
3 控制器设计
3.1 参考模型的选取
为对挠性航天器进行退步直接自适应控制器设计,首先需设计具有理想控制性能的参考模型,该参考模型的输出即为实际航天器的期望姿态信息。与实际被控对象相对应,参考模型也分为参考动力学子系统与参考运动学子系统。
设航天器的期望姿态角速度、期望姿态四元数分别为
由于航天器运动学方程式(5)中不包含不确定参数,为精确已知系统,所以可以选择参考运动学子系统为

(9)
对于动力学子系统式(4),设计如下具有理想控制性能的参考动力学子系统:
{

(10)
式中:Am、Bm和Cm为适当维已知系数矩阵;um为参考输入;xm为参考状态变量,且xm的维数不受实际状态变量x的限制,亦即允许式(11)成立。
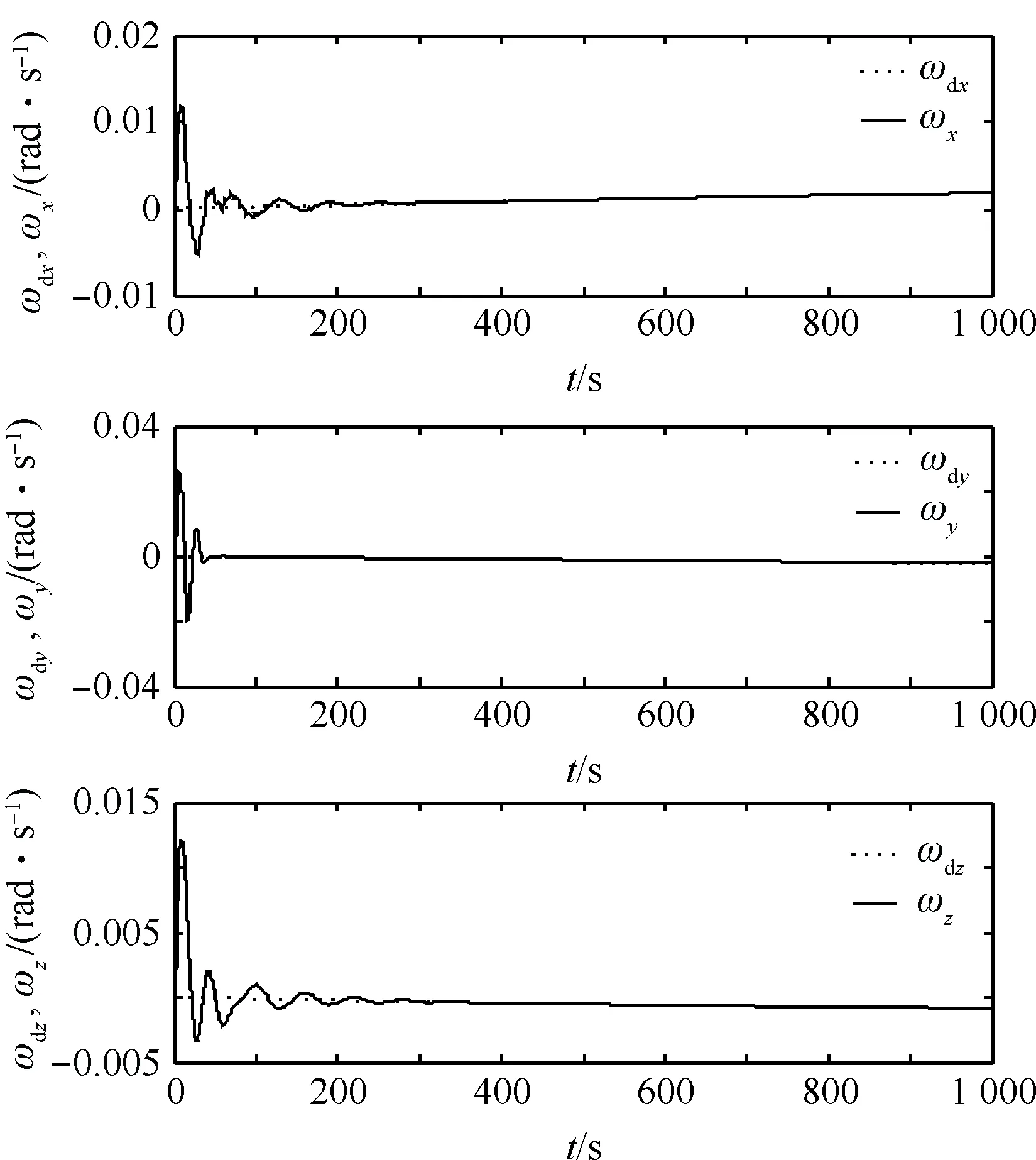
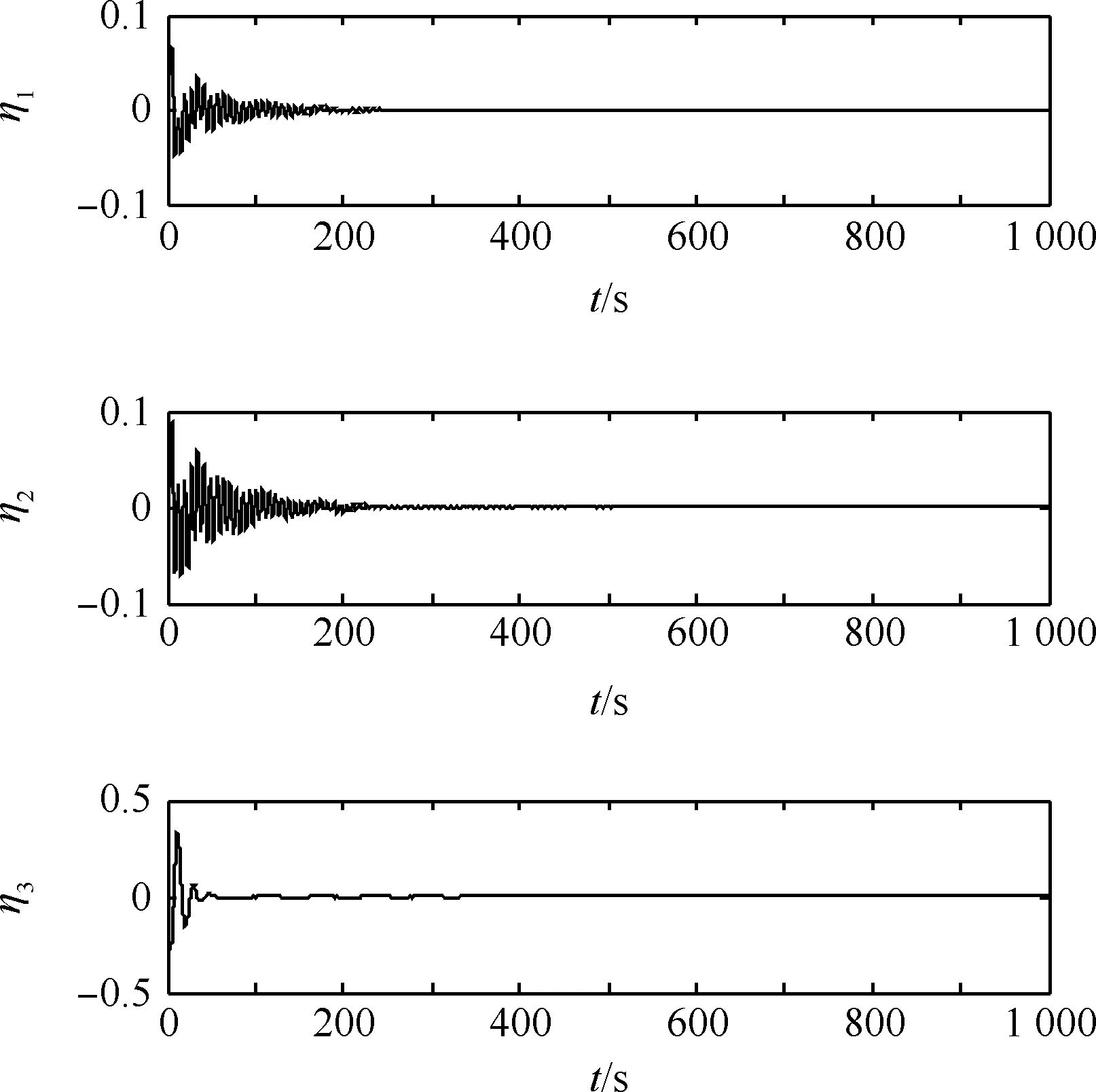
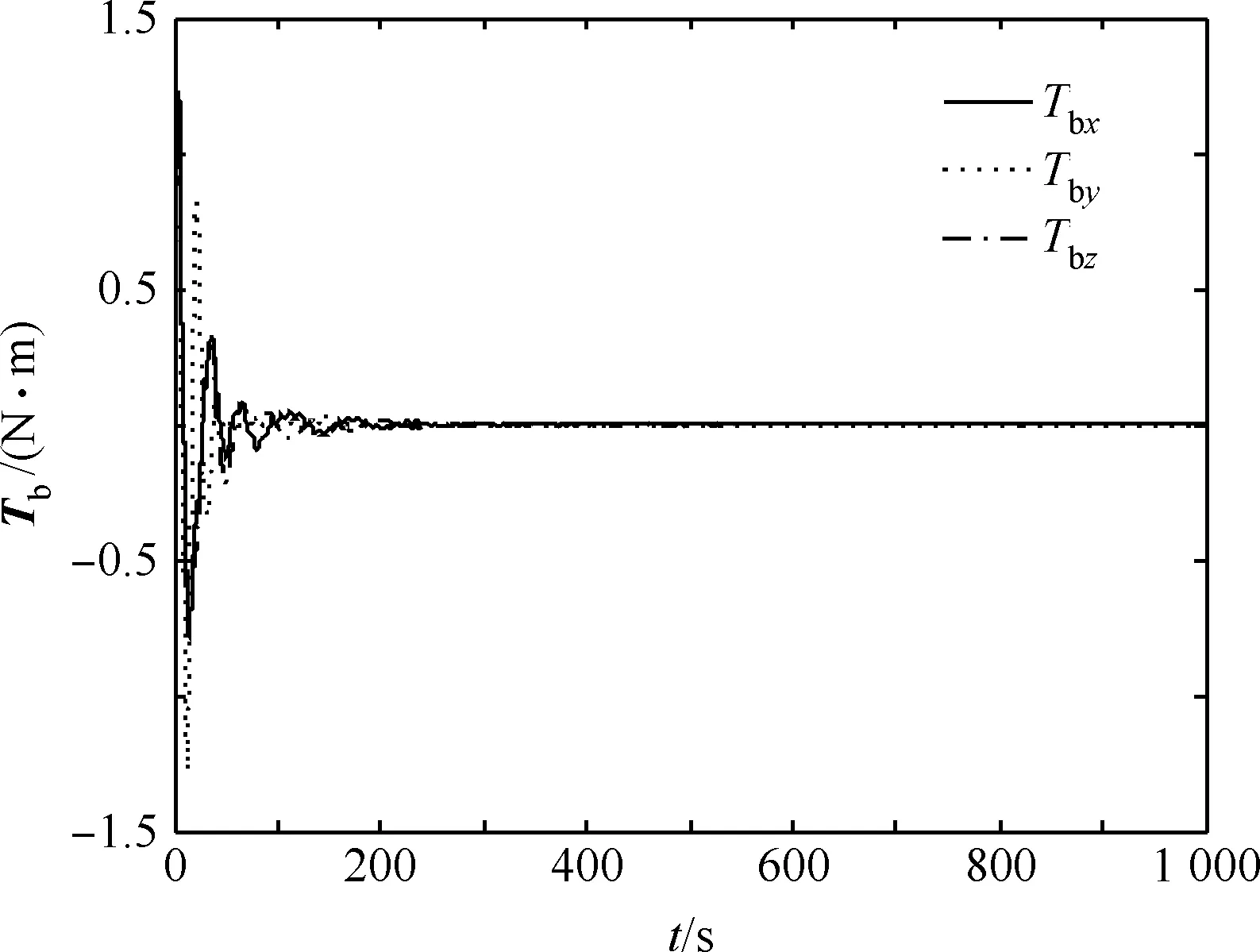
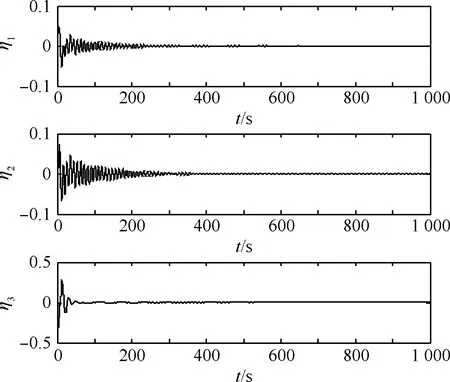
dim(x)< (11) 式中:dim(·)表示求向量维数。式(11)说明参考模型的维数可以远远小于被控对象的维数,控制器只需保持参考模型的输出维数和实际被控对象输出维数一致。 参考输入um由以下指令发生器给出: { (12) 式中:vm为指令发生器状态变量;Av和Cv为定常矩阵,在控制器设计时无需求解其具体值,只需满足um可测。 3.2 中间控制律 选取姿态角速度ω作为中间控制变量,将挠性航天器分解为运动学子系统和动力学子系统。首先以航天器运动学子系统式(5)为研究对象,应用Lyapunov稳定性理论设计中间控制律,以实现航天器姿态四元数对期望姿态四元数的渐近跟踪。 定义姿态四元数跟踪误差与姿态角速度跟踪误差分别为 (13) ωe=ω-Abdωd (14) 式中:Abd为期望姿态到航天器本体系的坐标转换矩阵。则航天器运动学误差方程为 (15) 取以下正定Lyapunov函数: (16) 式中:sgn(qe0)为符号函数,定义为 (17) 对式(16)分段求导,可得: (18) 由于航天器运动学误差方程式(15)为精确关系式,不受未建模动力学信息的直接影响,可以设计常系数控制律实现误差方程渐近稳定。取 ωem=-sgn(qe0)k1qe (19) 式中:k1为正定对称控制器参数阵。则中间控制律为 ωm=ωem+Abdωd (20) 若有ωe=ωem,则 (21) 当且仅当qe=0时,不等式取等号,所以由LaSalle不变性原理可知航天器姿态角速度等于中间控制律ωm时,航天器运动学误差方程渐近稳定,姿态四元数实现对期望姿态四元数输出渐近跟踪。 3.3 退步直接自适应控制器 接下来退一步,以航天器动力学子系统为研究对象,并以中间控制律ωm作为动力学子系统的期望输出,通过非线性直接自适应控制理论以及Lyapunov理论设计挠性航天器姿态控制律,使得动力学子系统输出对ωm实现渐近跟踪,从而实现航天器的姿态跟踪控制。 定理1对于由式(4)、式(5)所描述的挠性航天器系统,若动力学子系统式(4)中的线性部分{A,B,C}满足近似严格正实性,非线性项f(x)满足局部Lipchitz条件,则在自适应控制律 { u=kr=kee+kqqe+kxxm+kuum (22) 以及自适应律 (23) 的作用下,挠性航天器姿态输出对参考模型式(9)和式(10)的输出渐近跟踪,且自适应系数k保持有界。其中 而Γ=diag(Γe,Γq,Γx,Γu),Γe、Γq、Γx和Γu均为正定对称控制系数阵。 证明定义中间变量跟踪误差为 e=ω-ωm (24) 由于中间变量跟踪误差e的存在,此时有 ωem=ωe-e (25) 将式(25)代入式(18),得到 (26) 由于挠性航天器动力学子系统满足近似严格正实性,其能实现对参考输出的理想跟踪。定义x*、u*和ω*分别为动力学子系统理想跟踪状态下的理想状态变量、理想输入和理想输出。可得动力学子系统的理想状态方程为 { (27) 式中:上标“*”表示在实现理想跟踪时系统各变量所处的状态。定义实际状态变量与理想状态变量之差为状态误差,亦即 ex=x-x* (28) 则理想输出为 ω*=Cpx*=ωm (29) 而中间变量跟踪误差 e=Cpex (30) 对状态误差求导得到: (31) (32) (33) 式中: (34) 为证明在控制律式(22)的作用下闭环控制系统的渐近稳定性,选取如下正定Lyapunov函数: (35) 对式(35)求导可以得到: (36) (37) (38) (39) (40) 若L满足以下关系: (41) 式中:λmin(Q1)为矩阵Q1的最小特征值;λmax(P)为矩阵P的最大特征值。则有 (42) 当且仅当qe=0,ex=0时,不等式取等号,由LaSalle不变性原理可知,式(4)和式(5)所描述的挠性航天器系统可实现对参考模型输出的渐近跟踪,且自适应系数k保持有界,定理得证。 注1在定理1的证明过程中,不涉及动力学子系统的参数,控制器不依赖航天器的模型,只需要姿态四元数以及姿态角速度可测,对航天器参数不确定性具有强鲁棒性。 注2动力学子系统状态变量包含航天器的姿态信息以及挠性部件的模态坐标,控制器实现状态变量对理想状态变量的渐近跟踪,亦即控制器在实现航天器姿态信息对期望信息稳定跟踪的同时也实现了对挠性振动的有效抑制。 注3控制器无需状态观测器,无需对挠性航天器模型降阶,结构简单,维数与航天器姿态输出维数保持一致,可调控制参数较少。 注4该控制器设计方法不仅适合挠性航天器姿态控制,亦可以推广到其他满足动力学子系统为近似严格正实性的二阶系统以及高阶系统。 4.1 仿真参数 为验证本文所提出的退步直接自适应控制器对参数不确定性挠性航天器姿态控制的有效性,选取文献[18]所描述的挠性航天器分别在标称参数以及在具有参数偏差两种仿真条件下进行数值仿真。 仿真2为挠性航天器具有参数偏差的数值仿真,选取的挠性航天器参数分别为0.3I,0.5F,0.8ωf以及0×ξf,以验证控制器不依赖航天器的参数以及对挠性振动抑制的有效性,仿真2中其他仿真参数与仿真1保持一致。 表1星体仿真参数(仿真1) Table1Simulationparametersofspacecraft(Simulation1) 4.2 仿真结果 仿真时长为1 000 s,仿真结果如图1~图8所示。其中图1~图4给出的是挠性航天器在标称参数情况下(仿真1)的仿真结果。图1给出的是挠性航天器实际姿态四元数对期望姿态四元数的跟踪曲线,可以看出在仿真进行300 s左右后,航天器姿态四元数实现了对期望姿态四元数的稳定跟踪,姿态四元数跟踪精度达到10-4单位级别。图2给出的是航天器姿态角速度对期望姿态角速度的跟踪曲线,与姿态四元数跟踪曲线一样,在仿真进行约300 s后,航天器姿态角速度实现了对期望姿态角速度的稳定跟踪,航天器姿态稳定度达到10-5rad/s的级别。通过理论分析不难发现,仿真前期为控制器自适应参数在线自适应的过程,在控制器参数完成在线自适应后,航天器姿态信息实现对期望曲线的渐近跟踪。图3和图4分别给出的是航天器控制力矩响应曲线以及挠性部件挠性模态坐标响应曲线。图4显示,航天器挠性振动得到了有效的抑制。 图1 实际姿态四元数与期望姿态四元数(仿真1) Fig.1 Actual and desired attitude quaternion (Simulation 1) 图2 实际姿态角速度与期望姿态角速度(仿真1) Fig.2 Actual and desired angular velocities (Simulation 1) 图3 姿态控制力矩变化曲线(仿真1) Fig.3 Time history of attitude control torques (Simulation 1) 图4 模态坐标响应(仿真1)Fig.4 Response of modal coordinates (Simulation 1) 图5~图8给出的是在挠性航天器具有参数偏差情况下(仿真2)的仿真结果,图5与图6分别给出了挠性航天器的姿态四元数与姿态角速度对期望曲线的跟踪情况。通过与仿真1的结果(图1、图2)比较可以发现,尽管航天器参数具有较大的偏差,所设计的退步直接自适应姿态控制器的控制性能基本不变。图7给出的是航天器控制力矩的变化曲线,较之图3控制力矩的峰值减小了不少,主要是因为仿真2中航天器的转动惯量小于仿真1中航天器的转动惯量,相对应的控制力矩也小。而图8则表明在挠性部件本身不具有振动阻尼的情况下,航天器的挠性振动依然得到了有效的抑制,进一步验证了退步直接自适应控制器对挠性航天器振动的有效抑制。 图5 实际姿态四元数与期望姿态四元数(仿真2)Fig.5 Actual and desired attitude quaternion (Simulation 2) 图6 实际姿态角速度与期望姿态角速度(仿真2)Fig.6 Actual and desired angular velocities (Simulation 2) 图7 姿态控制力矩变化曲线(仿真2) Fig.7 Time history of attitude control torques (Simulation 2) 图8 模态坐标响应(仿真2)Fig.8 Response of modal coordinates (Simulation 2) 对两组仿真结果分析和对比可知,在航天器参数具有较大的偏差时,退步直接自适应控制器对挠性航天器的控制依然有效,特别是在挠性模态参数显著变化时,控制器仍然能有效地抑制航天器的挠性振动。控制器对具有参数不确定性的挠性航天器的控制是有效的。 1) 利用退步控制方法和非线性直接自适应控制方法设计了参数不确定挠性航天器的退步直接自适应姿态稳定控制器,并进行了数值仿真。 2) 理论分析与仿真结果表明该控制器不仅能实现航天器姿态信息对期望姿态信息的稳态跟踪,亦能有效抑制挠性部件的振动,对参数不确定的挠性航天器的控制是有效的。 3) 该控制器不依赖航天器参数,维数低,结构简单,无需模态坐标反馈,具有工程应用前景。 [1] Tsuchiya K. Dynamics of a spacecraft during extension of flexible appendages. Journal of Guidance, 1983, 6(2): 100-103. [2] Zhang J, Xu S J. Control of flexible spacecraft via state-dependent Riccati equation technique. Journal of Astronautics, 2008, 29(1): 138-144. (in Chinese) 张军, 徐世杰. 基于SDRE方法的挠性航天器姿态控制. 宇航学报, 2008, 29(1): 138-144. [3] Sun Z W, Ye D, Yang Z X, et al. Variable structure tracking control of flexible spacecraft based on output feedback. Acta Aeronautica et Astronautica Sinica, 2010, 31(5): 1060-1065. (in Chinese) 孙兆伟, 叶东, 杨正贤, 等. 基于输出反馈的柔性航天器变结构跟踪控制方法. 航空学报, 2010, 31(5): 1060-1065. [4] Hu Q L, Ma G F, Jiang Y. Adaptive variable structure output feedback maneuvering control for flexible spacecraft with input constraints. Journal of Astronautics, 2007, 28(4): 876-880. (in Chinese) 胡庆雷, 马广富, 姜野. 控制受限的挠性航天器姿态机动自适应变结构输出反馈控制. 宇航学报, 2007, 28(4): 876-880. [5] Sobel K, Kaufman H, Mabius L. Model reference output adaptive control system without parameter identification. 18th IEEE Conference on Decision and Control Including the Symposium on Adaptive Processes, 1979: 347-351. [6] Kaufman H, Bar-kana I, Sobel K. Direct adaptive control algorithms. 2nd ed. New York: Springer-Verlag, 1998. [7] Bar-Kana I, Kaufman H. Some applications of direct adaptive control to large structural systems. Journal of Guidance, 1984, 7(6): 717-724. [8] Bar-Kana I, Fischl R, Kalata P. Direct position plus velocity feedback control of large flexible space structures. IEEE Transactions on Automatic Control, 1991, 36(10): 1186-1188. [9] Barkana I, Ben-Asher J Z. Simple adaptive control applications to large flexible structures. Journal of Guidance, Control, and Dynamics, 2011, 34(6): 1929-1932. [10] Lam Q M, Chipman R, Hu T H G, et al. Adaptive control applied to space station attitude control system. AIAA-1992-4483, 1992. [11] Harvey S A, Balas M J. Direct model reference adaptive attitude control of a PNP satellite with unknown dynamics. AIAA-2007-6436, 2007. [12] Kanellakopoulos I, Kokotovic P V, Morse A S. Systematic design of adaptive controllers for feedback linearizable systems. IEEE Transactions of Automatic Control, 1991, 36(11): 1241-1253. [13] Zheng M J. Spacecraft attitude control system design via backstepping control method. Beijing: School of Astronautics, Beihang University, 2007. (in Chinese) 郑敏捷. 退步控制设计方法在航天器姿态控制系统中的应用. 北京: 北京航空航天大学宇航学院, 2007. [14] Wang X Y, Ding S H, Li S H. Stabilization of flexible spacecraft attitude based on backstepping control. Acta Aeronautica et Astronautica Sinica, 2011, 32(8): 1512-1523. (in Chinese) 王翔宇, 丁世宏, 李世华. 基于反步法的挠性航天器姿态镇定. 航空学报, 2011, 32(8): 1512-1523. [15] Torres S C, Mehiel E A. Nonlinear direct adaptive control and disturbance rejection for spacecraft. AIAA-2006-6038, 2006. [16] Di Gennaro S. Output stabilization of flexible spacecraft with active vibration suppression. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 747-759. [17] Barkana I. On gain conditions and convergence of simple adaptive control. AIAA-2003-5327, 2003. [18] Di Gennaro S. Passive attitude control of flexible spacecraft from quaternion measurements. Journal of Optimization Theory and Applications, 2003, 116(1): 41-60. DirectAdaptiveAttitudeTrackingControlofFlexibleSpacecraftBasedonBacksteppingMethod LIUMin,XUShijie*,HANChao SchoolofAstronautics,BeihangUniversity,Beijing100191,China Abacksteppingdirectadaptivecontrolstrategyisproposedfortheattitudetrackingoflargeflexiblespacecraftwithparameteruncertainties.First,thealmoststrictlypositiverealpropertyofaflexiblespacecraftdynamicssubsystemisconfirmedandareferencemodelwithidealcontrolperformanceisdesigned.Second,aconsistentoutputfeedbackintermediatecontrollawisdesignedforthekinematicssubsystemdescribedbyattitudequaternion,whichcanmaketheattitudequaterniontrackthereferenceoutputasymptotically.Thenbackingastep,abacksteppingdirectadaptiveattitudetrackingcontrollerisderivedfortheparameterunknowndynamicssubsystembasedonthenonlineardirectadaptivecontroltheoryandtheLyapunovstabilitytheory,anditsclose-loopstabilityisproved.Finally,thecontrolstrategyisemployedtodesignanattitudetrackingcontrollerforaflexiblespacecraft.Numericalsimulationresultsindicatethatthecontrollercandampthevibrationoftheflexiblecomponentsofthespacecraft,anditiseffectiveforitscontrol. flexiblespacecraft;uncertainty;attitudecontrol;backsteppingcontrol;nonlineardirectadaptivecontrol;positiverealproperty 2012-02-24;Revised2012-03-18;Accepted2012-04-12;Publishedonline2012-04-171004 URL:www.cnki.net/kcms/detail/11.1929.V.20120417.1004.007.html NationalNaturalScienceFoundationofChina(10902003) .Tel.:010-82339275E-mailstarsjxu@yahoo.com.cn 2012-02-24;退修日期2012-03-18;录用日期2012-04-12; < class="emphasis_bold">网络出版时间 时间:2012-04-171004 www.cnki.net/kcms/detail/11.1929.V.20120417.1004.007.html 国家自然科学基金(10902003) .Tel.:010-82339275E-mailstarsjxu@yahoo.com.cn LiuM,XuSJ,HanC.Directadaptiveattitudetrackingcontrolofflexiblespacecraftbasedonbacksteppingmethod.ActaAeronauticaetAstronauticaSinica,2012,33(9):1697-1705. 刘敏,徐世杰,韩潮.挠性航天器的退步直接自适应姿态跟踪控制.航空学报,2012,33(9):1697-1705. http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn 1000-6893(2012)09-1697-09 V448.22+3 A 刘敏男, 博士研究生。主要研究方向: 挠性航天器动力学与控制, 自适应控制理论与应用。 Tel: 010-82339751 E-mail: liumin@sa.buaa.edu.cn 徐世杰男, 博士, 教授, 博士生导师。主要研究方向: 航天器、月球与深空探测动力学与控制, 鲁棒控制理论及应用。 Tel: 010-82339275 E-mail: starsjxu@yahoo.com.cn 韩潮男, 博士, 教授, 博士生导师。主要研究方向: 航天器动力学与控制, 航天器导航、 制导与控制, 航天系统动力学仿真等。 Tel: 010-82339583 E-mail: hanchao@buaa.edu.cn


e=ω+sgn(qe0)k1qe-Abdωd








4 数值仿真






5 结 论