高超声速飞行器大包线切换LPV控制方法
2012-11-16张增辉杨凌宇申功璋
张增辉, 杨凌宇, 申功璋
北京航空航天大学 飞行器控制一体化技术重点实验室, 北京 100191
高超声速飞行器大包线切换LPV控制方法
张增辉, 杨凌宇, 申功璋*
北京航空航天大学 飞行器控制一体化技术重点实验室, 北京 100191
高超声速飞行器飞行包线和参数变化范围大,气动参数存在较强不确定性,要求控制器能够适应大的飞行包线并具有较好的鲁棒性。针对上述问题,提出一种基于间隙度量的大包线滞后切换线性变参数(LPV)控制方法。依照时变参数将设计包线划分为若干子区域,将多胞理论和间隙度量引入控制器求解,提出了基于最优间隙度量的LPV控制方法,并利用此方法独立设计各子区域的LPV控制器,以改善控制器控制性能和鲁棒性能;利用基于重叠区域的滞后切换策略实现大包线内各子区域控制器的切换,以抑制切换面附近控制器的切换抖动,并证明了切换闭环系统的稳定性;最后以某型高超声速飞行器为对象设计了大包线滞后切换LPV控制器。仿真结果表明该方法可实现控制指令的精确跟踪,提高设计包线内LPV控制器的控制性能和鲁棒性能,并能保证切换系统的稳定性。
线性变参数控制; 切换系统; 高超声速飞行器; 大包线; 间隙度量; 滞后切换
高超声速飞行器飞行包线范围大,气动特性和飞行动力学特性变化剧烈,参数存在较强的不确定性,因此对飞行控制系统有着很高的要求,其控制系统必须能够适应较大参数变化范围并具有较好的鲁棒性[1-4]。传统的增益调参方法在大包线内的调参过程极其繁杂,对系统的不确定性鲁棒性较差,并且无法从理论上保证系统在整个包线内的稳定性[5]。线性变参数(Linear Parameter Varying,LPV)控制是一种新颖的增益调度技术,通过实时可测或可估计的系统参数变化体现系统时变特性,可在整个参数轨迹上保证鲁棒稳定性和鲁棒性能[5-6],该方法克服了传统增益调参控制器的插值问题和稳定性问题,大大减少了调参工作量,同时保证了工程实现性,被广泛用于飞机、导弹、卫星等航空航天系统的控制器设计研究中[7-13]。但是随着飞行包线范围的扩大,系统的时变参数范围随之变大,大的设计包线内单一的LPV控制器性能将变得很差甚至无法求得LPV控制器。Lu等[11-13]将LPV控制方法与切换控制理论相结合,提出了一种基于参变Lyapunov函数的切换LPV控制方法,并将其应用于F-16飞机进行了验证;Hu和Yuan[14]将此方法应用于核蒸汽发生器的水位控制,取得了良好的控制器效果;袁士春等[15]忽略了参变Lyapunov函数矩阵的参数导数项,简化了线性矩阵不等式(LMI)的求解。但此类基于参变Lyapunov函数的LPV方法需求解无穷多组LMI,而网格化的求取方法[16]随着高超声速飞行器飞行包线的增大,需求解的LMI将呈级数增加,使控制器求解变得非常困难,并且网格化方法也无法从理论上保证求解控制器的稳定性。
针对上述问题,本文提出了一种新的大包线切换LPV控制方法。针对各子区域的飞行器模型,将多胞理论、间隙度量和单一Lyapunov函数引入控制器求解,以简化控制器求解过程,降低系统的保守性,并从理论上保证系统的稳定性;采用基于重叠区域的滞后切换策略实现子控制器组之间的切换,以保证切换系统的稳定性和切换平稳性。最后将其应用于某型高超声速飞行器中进行了仿真验证。
1 切换LPV系统
考虑如下非线性系统:
(1)
式中:x∈Rn为系统状态;u∈Rnu为系统输入信号;z∈Rnz为所控制的误差信号;y∈Rny为输入到控制系统的测量输出信号;w∈Rnw为外部调参信号或外来信号(如参考信号);v∈Rnv为干扰和噪声输入信号。根据非线性系统的时变特性,选择调参变量θ∈P⊂Rk,θ为可测量或可估计的矢量参数,P为系统变参数区域。则非线性系统(1)可写成如下的开环LPV系统[11]:
(2)
式中:A、B1、B2、C1、C2、D11、D12、D21和D22为LPV系统矩阵。
假设P可由一系列切换面分割为一组子区域集{Pi}i∈ZN即P=∪Pi,ZN={1,2,…,N},各子区域可以互相重叠或是互联。对于开环LPV系统,不同的子区域可独立设计LPV控制器:
(3)
式中:xk∈Rnk为控制器状态。当调参变量θ碰到切换面时,对不同区域的子控制器进行切换,通过合适的切换策略保证设计包线内闭环系统稳定。综合式(2)和式(3),可得闭环切换LPV系统:
(4)

2 大包线切换LPV控制方法
2.1 基于间隙度量的LPV控制原理
定义1[17]矩阵多胞可定义成由有限个顶点矩阵Nm所组成的凸组合,Nm具有相同的维数。具体可描述为
(5)
定义2[17]设变参数向量ρ(t)∈Rl,l为时变参数向量ρ(t)的维数,且ρ(t)=p(θ(t)),其中p:Rk→Rl为一个映射函数,则由变参数描述的多胞为

(6)
式中:r=2l为顶点数;ωm为多胞的顶点。当LPV系统的系统矩阵A(θ(t))、B(θ(t))、…仿射依赖于时变参数向量ρ(t),且ρ(t)变化于多胞Θ内时,称LPV系统为多胞LPV系统。
将LPV系统(2)的系统矩阵做多胞凸分解:
(7)
式中:Am、Bm、Cm和Dm为LPV系统多胞顶点模型系统矩阵。根据多胞系统的顶点性质和实有界定理[17-18],设计控制器时只设计其顶点即可。
定理1(实有界定理)[18]考虑系统

(8)
(9)

(10)
由定理2可知,LPV控制的核心问题为对所有的多胞顶点寻找相同的Lyapunov函数,以保证对LPV对象所有可能轨迹都具有H∞性能。一旦(R,S)确定,对应的Lyapunov矩阵和顶点控制器均可确定。
利用LMI工具箱[19]求解上述2r+1个LMI,寻找(R,S)使得γ的值最小,得到(R,S)和γ。在此基础上选取Lyapunov函数矩阵:
(11)
将求得的Lyapunov函数矩阵和γ应用于实有界定理,利用标准的H∞控制器求解方法[18-19],求取各个多胞顶点的控制器:
(12)
式中:Ak,m、Bk,m、Ck,m和Dk,m为顶点控制器系统矩阵,全部离线计算获得。LPV控制器可由各顶点控制器线性组合得到,形式为
(13)
为了保证系统稳定性,调参系数αm须与凸分解系数相同。
定义3[20]对于多输入多输出系统,总存在规范互质分解,不妨设G1,G2∈Rn×m(s)为具有m个输入、n个输出的传递函数阵,(D1,N1)和(D2,N2)分别为G1和G2的规范右互质分解,则G1和G2之间的间隙度量为

(14)
式中:
其中:RH∞为实H∞空间。
间隙度量提供了系统之间的一种广义距离度量,体现了两系统之间的“差异程度”,距离越小说明两个系统的动态特性越相近[21-22]。将间隙度量引入调参策略中,使控制器设计与系统的动态特性相关联,使得所设计状态点系统模型与顶点模型的间隙度量最小,进而得到性能更优的LPV控制器。调参系数αm的求解步骤如下:
1) 对于任意时刻的参数向量ρ=[ρ1ρ2…ρl]T,计算当前时刻系统模型与r(r=2l)个顶点模型之间的间隙度量δ1,δ2,…,δr。
2) 对于每一个多胞顶点ωm(m=1,2,…,r),调参系数αm可由式(15)优化得到。
(15)

针对各个子区域,利用上述方法独立设计控制器,在子区域控制器设计的基础上,选择合适的切换策略来保证大包线切换系统的稳定性。
2.2 基于重叠区域的滞后切换LPV控制方法
对设计包线进行区域划分,使得任意两个参数子区域相互重叠,如图1所示。

图1 基于滞后切换策略的切换区域Fig.1 Hysteresis switching region
由图1可知,在两个子区域之间存在两个切换面SSij和SSji,用SSij表示从Pi到Pj方向的切换。当参数轨迹碰到切换面时,切换事件将发生。切换信号σ的演化过程描述如图2所示。

图2 基于滞后切换策略的切换信号Fig.2 Hysteresis switching signal
若θ(0)∈Pi,则σ(0)=i。对所有t>0,有
(16)
若θ(0)∈Pj,则σ(0)=j。对所有t>0,有
(17)
定理3[12]对于切换LPV系统(4),假设子区域LPV系统稳定,且子区域集{Pi}i∈ZN存在一组对应的Lyapunov函数:
(18)
Xσ={Xi}i∈ZN为对应的正定矩阵。若在切换面θ∈SSij,Lyapunov函数满足
Vi(xcl)≥Vj(xcl)
(19)
则切换LPV系统可实现稳定切换。

(20)
并且对于任意的θ∈SSij,满足
(21)
则在整个时变参数区域内,基于重叠区域的滞后切换LPV控制器使得闭环LPV系统(4)稳定,并且其性能满足
(22)
证明
1) 在任意选定的时变参数区域Pi中,对于其中任意的θ∈Pi,选定式(20)中的i,直接运用定理2,可得在任意子区域内设计的LPV控制器满足二次H∞性能,即控制器在子区域内稳定且鲁棒性能满足
(23)
综合各子区域γ=max{γi}i∈ZN,即可得式(22)。
2) 对于闭环LPV系统(4),在任意切换时刻变参数θ∈SSij,选定
则

(24)
代入式(18)可得
(25)
由定理3可知,在任意的切换时刻闭环LPV系统(4)保持稳定。综合1)和2),定理4得证。

(26)
将xk(t+)=x(t)代入式(18),结合式(24)可将定理4中的条件式(21)简化为
Ri≤Rj
(27)
依照上述基于重叠区域的滞后切换策略可实现设计包线内子控制器组的稳定切换。切换LPV自增益调参控制方法设计流程如图3所示。

图3 切换LPV控制方法设计流程Fig.3 Flow chart of switching LPV control law design
由图3可知,切换LPV自增益调参控制律设计步骤如下:
① 将非线性系统转化为LPV系统,建立系统的LPV模型。
② 将设计包线分成相互重叠的子区域。
③ 利用基于最优间隙度量的LPV控制方法设计子区域的LPV控制器。
④ 验证切换稳定性条件Ri≤Rj是否满足,若不满足则返回步骤③或步骤②,通过调整子区域控制器的设计参数或子区域划分的大小来保证稳定性条件。
2.3 高超声速飞行器大包线切换LPV控制律设计
以锥形体高超声速飞行器[23-24]为研究对象设计大包线(高度H∈[17,25] km,马赫数Ma∈[10,12])纵向切换LPV控制律。利用Jacobian线性化方法将其非线性模型转化为LPV模型,纵向模型为
(28)

图4中:G为高超声速飞行器LPV模型;Act、Sen分别为作动器和传感器模型;αc为指令信号;σ为切换信号;K1,K2,…,Kσ为子区域LPV控制器;Wu、We、Wn为加权函数阵;ze和zu分别为误差信号和输入信号的加权输出。
以高度和马赫数(H,Ma)为LPV系统调参变量θ,时变参数向量ρ(t)=[a11a21b1b2]T,选取覆盖整个设计包线的状态点θ(t),通过拟合得到ρ(t)中各个元素ρi(t)关于θ(t)的函数,即ρi(t)=p(θ(t)),则高超声速飞行器纵向LPV系

图4 纵向切换LPV控制器结构Fig.4 Structure of longitude switching LPV controller
统仿射依赖于ρ(t)。依据此构型飞行器的LPV模型特性及控制任务要求,将设计包线依照高度分为4个子区域:P1:22.8 km≤H≤25.0 km;P2:20.8 km≤H≤23.2 km;P3:18.8 km≤H≤21.2 km;P4:17.0 km≤H≤19.2 km。切换面为:SS12:H=22.8 km,SS21:H=23.2 km,SS23:H=20.8 km,SS32:H=21.2 km,SS34:H=18.8 km,SS43:H=19.2 km,如图5所示。

图5 包线区域划分图Fig.5 Partition of the envelope

(29)
子区域内的多胞LPV系统为
Pρ∶=Co{Pv1,Pv2,…,Pvl},vl=24
(30)

(31)
(32)
(33)
(34)
整个设计包线内控制输入罚函数Wu为
(35)
作动器模型Wact为
(36)
传感器模型Wsen为
(37)
噪声模型Wn为
Wn=diag(0.1°,0.7 (°)/s)
(38)
针对上述高超声速飞行器的多胞顶点模型,通过2.1节中基于LMI的H∞控制方法求得各个顶点控制器Kσcornm,利用基于最优间隙度量的凸分解策略求得系数αm,构造子区域内的LPV鲁棒控制器,形式为
(39)
当高超声速飞行器调参变量θ(H,Ma)通过切换面时,利用2.2节中的滞后切换策略,实现控制器组K1,K2,…,Kσ间的稳定切换。
3 仿真验证与分析
以锥形体高超声速飞行器为对象对本文方法进行仿真验证。控制律的设计目标是在飞行包线(H∈[17,25] km,Ma∈[10,12])内保证系统的稳定性,并以小于1%的误差跟踪指令信号αc。
仿真分析1:
任意选取初始状态点(H=24 km,Ma=11,α=0.539 1°),利用上述切换LPV控制方法设计高超声速飞行器的纵向控制器,对大包线切换控制器稳定性进行验证。给定如图6所示迎角指令,加入高超声速飞行器非线性模型进行仿真,响应结果如图6~图8所示。
由图6~图8可知,子区域LPV控制器在切换面22.8 km(22.10 s)、20.8 km(33.58 s)和18.8 km(40.36 s)进行了切换,各个切换时刻升降舵偏角有很小范围的波动,迎角实现了平稳精确跟踪,稳态误差均小于0.5%。可见本文设计的切换LPV控制器实现了迎角指令的精确跟踪,并且能够很好地保持控制器之间的平稳切换,保证了系统的稳定性。

图6 迎角响应曲线Fig.6 Response curves of angle of attack

图7 高度曲线Fig.7 Curves of altitude
图8 舵偏曲线Fig.8 Curves of elevator deflection angle
仿真分析2:
在模型参数存在不确定性的情况下,对切换LPV方法的鲁棒性进行仿真验证。任选取初始状态点(H=24 km,Ma=11,α=0.539 1°),利用上述切换LPV控制方法设计高超声速飞行器的纵向控制器,将非线性模型气动力系数加入边界值为±15%的随机不确定性,气动力矩系数加入边界值为±25%的随机不确定性。给定如图9所示迎角指令,对高超声速飞行器非线性系统进行100次蒙特卡罗仿真,结果如图9~图11所示。
由图9~图11可知,采用本文方法设计的大包线切换LPV控制器在模型参数存在不确定性的情况下,仍能实现迎角指令精确跟踪,具有较强的鲁棒性,并且在模型参数存在不确定性的情况下仍实现了平稳切换,保证了系统的稳定性。

图9 不确定性下迎角响应曲线Fig.9 Response curves of angle of attack under uncertainty
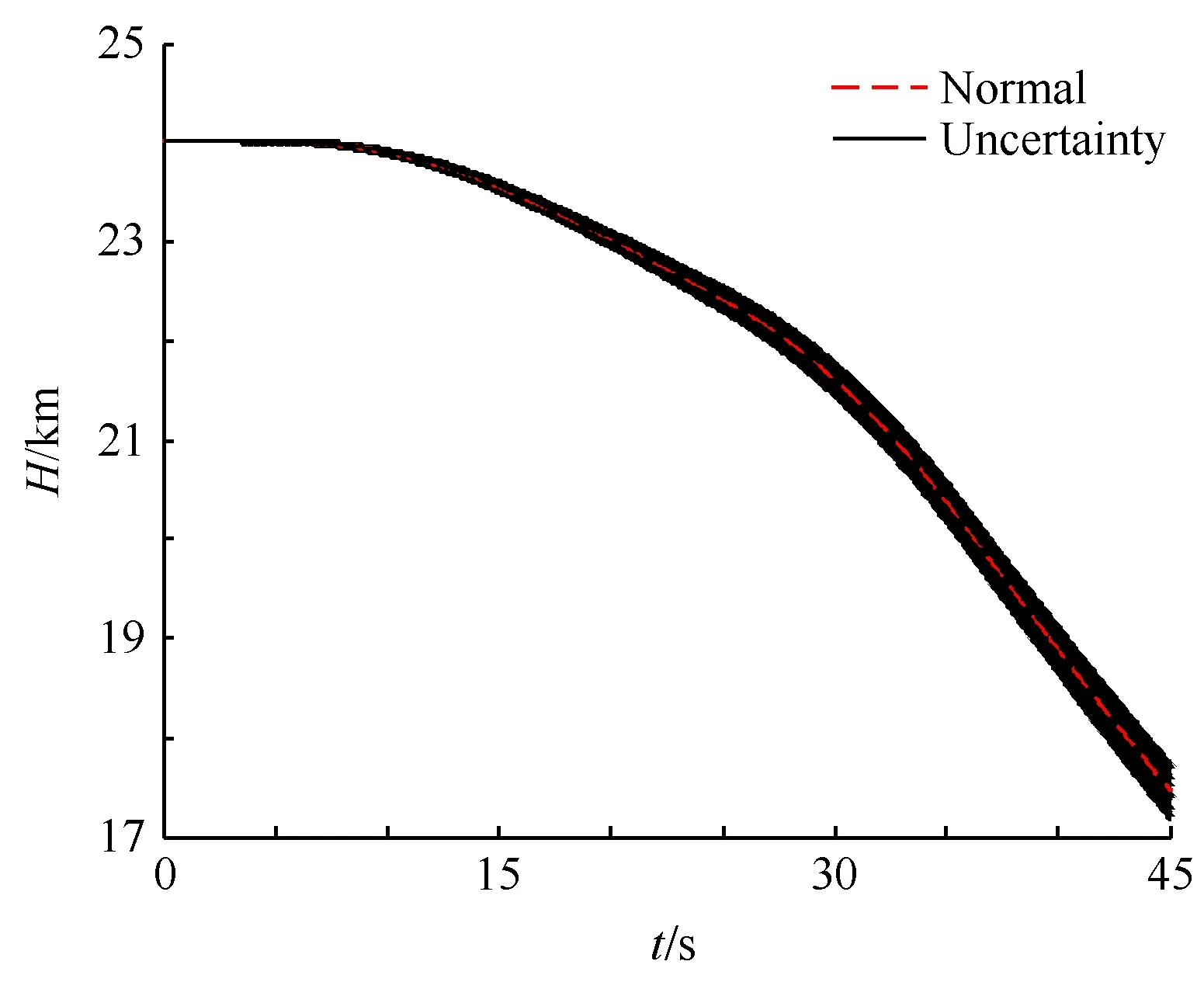
图10 不确定性下高度曲线Fig.10 Curves of altitude under uncertainty
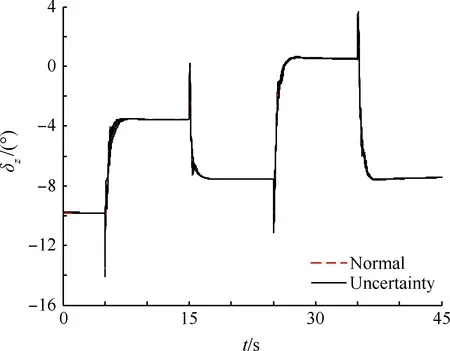
图11 不确定性下舵偏曲线Fig.11 Curves of elevator deflection angle under uncertainty
仿真分析3:
取多组覆盖设计包线的初始飞行状态点,对全包线内单一LPV控制方法和本文基于重叠区域的大包线切换LPV控制方法进行仿真对比。两种方法设计的控制器H∞性能指标γ如表1所示。
表1两种方法H∞性能指标γ对比
Table1EffectofthetwomethodsonH∞performancelevelγ

DesignmethodDesignregionH∞performancelevelγSingleLPVP2418SwitchingLPVP11973SwitchingLPVP21717SwitchingLPVP31628SwitchingLPVP41841SwitchingLPVP1973
由表1可知,不同的子区域独立设计控制器得到的控制器H∞性能指标γ不同。全包线内采用单一LPV控制方法得到的γ为2.418,将设计包线划分为若干子区域,使得设计的区域变小,各个子区域采用单一的LPV控制方法设计得到的γi最大为1.973。因此采用切换LPV方法设计的控制器得到的H∞性能指标γ相比单一LPV方法更优,提高了设计包线内控制器的鲁棒性能。
选取初始状态点(H=24 km,Ma=11,α=0.539 1°),将非线性模型气动力系数加入±25%的不确定性,气动力矩系数加入±40%的不确定性,对切换LPV方法和单一LPV方法设计的控制器的鲁棒性进行对比仿真验证,结果如图12和图13所示。
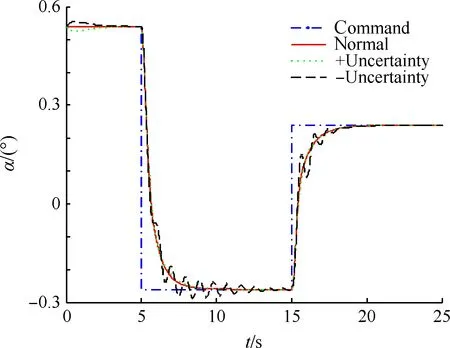
图12 单一LPV方法不确定性下迎角响应曲线Fig.12 Response curves of angle of attack using single LPV method under uncertainty

图13 切换LPV方法不确定性下迎角响应曲线Fig.13 Response curves of angle of attack using switching LPV method under uncertainty
由图12可知,利用单一LPV设计方法设计的控制器,当模型参数存在大的不确定性时,控制器性能下降,迎角响应出现了振荡,鲁棒性较差;而基于切换LPV方法设计的控制器鲁棒性较强,仍能保持良好的跟踪性能(见图13)。
将高超声速飞行器的设计包线扩大,选定设计包线(H∈[15,25] km,Ma∈[10,12]),将上述两种方法分别应用于锥形体高超声速飞行器非线性系统,给定相同的输入指令αc,对控制器的控制性能进行比较。首先将一组覆盖全包线所有初始状态点的迎角控制到相同的初始迎角α0=-0.5°,再给定相同的迎角指令αc=0.5°,其全包线内的迎角响应曲线仿真结果如图14和图15所示,迎角响应的边界对比曲线如图16所示。
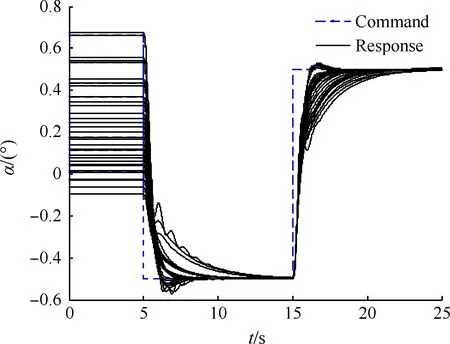
图14 单一LPV方法全包线迎角响应曲线Fig.14 Response curves of angle of attack using single LPV method in the full envelope

图15 切换LPV方法全包线迎角响应曲线Fig.15 Response curves of angle of attack using switching LPV method in the full envelope

图16 全包线迎角响应边界对比曲线Fig.16 Response boundary curves of angle of attack in the full envelope
由仿真图14~图16可知,采用基于重叠区域的切换LPV控制方法设计的控制器较单一LPV控制器的控制性能有所提高。单一LPV控制方法得到的控制器随着包线的增大性能逐步下降,迎角响应出现了振荡,并且大包线内迎角响应调整时间差别很大,控制器性能一致性较差。而切换LPV方法的迎角响应调整时间和超调量的变化范围更小,动态性能更趋向于一致,降低了控制系统设计的保守性,提高了其控制系能。同时,基于重叠区域的滞后切换策略保证了切换LPV控制器在整个设计包线内的稳定性。
4 结 论
提出一种基于间隙度量的大包线滞后切换LPV控制方法,并以某型高超声速飞行器为例进行了仿真验证。此方法相比单一LPV控制方法提高了控制器的性能和鲁棒性能,并能保证大包线内系统的稳定性。
1) 基于间隙度量的大包线滞后切换LPV控制方法可以很好地实现控制指令的跟踪,并能保证控制器切换时的稳定性。
2) 基于间隙度量的大包线滞后切换LPV控制方法具有很好的鲁棒性,在模型参数存在大的不确定性时仍能实现指令的精确跟踪,并保证切换系统的稳定性。
3) 基于间隙度量的大包线滞后切换LPV控制方法比单一LPV控制器设计方法保守性更小,得到的大包线内控制器的控制性能一致性更优,且大包线内控制器的鲁棒性能得到提高。
[1] Fidan B, Mirmirani M, Ioannou P A. Flight dynamics and control of air-breathing hypersonic vehicles: review and new directions. AIAA-2003-7081, 2003.
[2] Hanson J M. Advanced guidance and control project for reusable launch vehicles. AIAA-2000-3957, 2000.
[3] Hanson J M. A plan for advanced guidance and control technology for 2nd generation reusable launch vehicles. AIAA-2002-4557, 2002.
[4] Rodriguez A A, Dickeson J J, Cifdaloz O, et al. Modeling and control of scramjet-powered hypersonic vehicle: challenges, trends, & tradeoffs. AIAA-2008-6793, 2008.
[5] Shamma J S, Athans M. Gain scheduling: potential hazards and possible remedies. IEEE Control System, 1992, 12(3): 101-107.
[6] Lee C H, Shin M H, Chung M J. A design of gain-scheduled control for a linear parameter varying system: an application to flight control. Control Engineering Practice, 2001, 9(1): 11-21.
[7] Shin J Y, Gregory I. Robust gain-scheduled fault tolerant control for a transport aircraft. IEEE Intremational Conference on Control Application, 2007: 1209-1214.
[8] Wu F, Packard A, Balas G. Systematic gain-scheduling control design: a missile autopilot example. Asian Journal of Control, 2002, 4(3): 341-347.
[9] Biannic J M, Pittet C, Lafourcade L, et al. LPV analysis of switched controllers in satellite attitude control systems. AIAA-2010-7903, 2010.
[10] Fezans N, Alazard D, Imbert N, et al. Robust LPV control design for a RLV during reentry. AIAA-2010-8194, 2010.
[11] Lu B, Wu F. Switching LPV control designs using multiple parameter-dependent Lyapunov functions. Automatica, 2004, 40(11): 1973-1980.
[12] Lu B, Wu F, Kim S. Switching LPV control for high performance tactical aircraft. AIAA-2004-4999, 2004.
[13] Lu B, Wu F, Kim S. Switching LPV control of an F-16 aircraft via controller state reset. IEEE Transactions on Control Systems Technology, 2006, 14(2): 267-277.
[14] Hu K, Yuan J Q. On switchingH∞controllers for nuclear steam generator water level: a multiple parameter-dependent Lyapunov functions approach. Annals of Nuclear Energy, 2008, 35(10): 1857-1863.
[15] Yuan S C, Guo C, Lu J. Switching linear parameter-varying of ship steering control. Journal of Center South University, 2007, 38(Supp.1): 335-340. (in Chinese)
袁士春, 郭晨, 吕进. 基于切换LPV的船舶航向控制. 中南大学学报, 2007, 38(增刊): 335-340.
[16] Hughes H D, Wu F. Optimal control for spacecraft large angle maneuvers usingH∞linear varying parameter control techniques. AIAA-2008-7311, 2008.
[17] Apkarian P, Gahinet P, Becker G. Self-scheduledH∞control of linear parameter-varying systems: a design example. Automatica, 1995, 31(9): 1251-1262.
[18] Jia Y M. RobustH∞control. Beijing: Science Press, 2007: 149-160. (in Chinese)
贾英民. 鲁棒H∞控制. 北京: 科学出版社, 2007: 149-160.
[19] Gahinet P, Nemirovski A, Laub A J, et al. LMI control tool box. Massachusetts: The MathWorks, Inc., 1995: 7.2-7.15.
[20] Li W Q, Zheng Z Q. Robust gain-scheduling controller to LPV system using gap metric. Proceedings of the 2008 IEEE International Conference on Information and Automation, 2008: 514-518.
[21] El-Sakkary A. The gap metric: robustness of stabilization of feedback systems. IEEE Transactions on Automatic Control, 1985, 30(3): 240-247.
[22] Kyle A M, Beale G O. Performance and the gap metric. Proceedings of the 33rd IEEE Conference on Decision and Control, 1994: 2656-2658.
[23] Shaughnessy J D, Zane Pinckney S, McMinn J D, et al. Hypersonic vehicle simulation model: winged-cone configuration. NASA TM-102610, 1990.
[24] Zhang Z H, Yang L Y, Shen G Z, et al. Modeling and analysis for a generic hypersonic vehicle. IEEE 2010 8th World Congress on Intelligent Control and Automation, 2010: 152-158.
SwitchingLPVControlMethodinWideFlightEnvelopeforHypersonicVehicles
ZHANGZenghui,YANGLingyu,SHENGongzhang*
ScienceandTechnologyonAircraftControlLaboratory,BeihangUniversity,Beijing100191,China
Hypersonicvehiclestraverseabroadflightenvelopewithawideparametervariationrangeandstrongparameteruncertainties.Thereforeitisimportanttoimprovethecontrollerperformanceandrobustnessinawideenvelope.Anewhysteresisswitchinglinearparametervarying(LPV)controlmethodusingpolytopetheoryandgap-metricispresentedinthispaper.Thedesignenvelopeisfirstlydividedintoseveralsub-regionsinaccordancewiththetime-varyingparameters.AnewLPVcontrolmethodwiththeoptimalgap-metricisproposed,andthenafamilyofsingleLPVcontrollersaredesignedindependentlyusingthenewmethodtoimprovetheperformanceandrobustness,eachsuitableforaspecificsub-region.Theyareswitchedaccordingtothetime-varyingparametertrajectoriesusingthehysteresisswitchingstrategybasedonoverlapregionstoavoidchattering.Thestabilityoftheclosed-loopswitchingsystemisalsoproved.Finally,thenewswitchingLPVdesignapproachisappliedtoahypersonicvehicle.SimulationresultsshowthatthisnewmethodcanimprovetheperformanceandenhancetherobustnessoftheLPVcontrollersinawidedesignenvelope.TheperformanceofcommandtrackingandtherobustnessoftheswitchingLPVcontrolsystemaresatisfactory.Thestabilityofthesystemisalsoguaranteed.
linearparametervaryingcontrol;switchingsystems;hypersonicvehicle;wideflightenvelope;gap-metric;hysteresisswitching
2011-10-14;Revised2011-11-08;Accepted2012-03-14;Publishedonline2012-03-311146
URL:www.cnki.net/kcms/detail/11.1929.V.20120331.1146.004.html
s:NationalNaturalScienceFoundationofChina(60804007);AeronauticalScienceFoundationofChina(20070151004)
.Tel.:010-82338064E-mailshengz@buaa.edu.cn
2011-10-14;退修日期2011-11-08;录用日期2012-03-14; < class="emphasis_bold">网络出版时间
时间:2012-03-311146
www.cnki.net/kcms/detail/11.1929.V.20120331.1146.004.html
国家自然科学基金(60804007);航空科学基金(20070151004)
.Tel.:010-82338064E-mailshengz@buaa.edu.cn
ZhangZH,YangLY,ShenGZ.SwitchingLPVcontrolmethodinwideflightenvelopeforhypersonicvehicles.ActaAeronauticaetAstronauticaSinica,2012,33(9):1706-1716. 张增辉,杨凌宇,申功璋.高超声速飞行器大包线切换LPV控制方法.航空学报,2012,33(9):1706-1716.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
1000-6893(2012)09-1706-11
V448
A
张增辉男, 博士研究生。主要研究方向: 高超声速飞行器飞行控制及制导方法。
Tel: 010-82316873
E-mail: zhangzenghui@asee.buaa.edu.cn
杨凌宇男, 博士, 讲师。主要研究方向: 先进布局飞行器飞行控制技术, 高超声速飞行器飞行控制方法等。
Tel: 010-82316873
E-mail: yly@asee.buaa.edu.cn
申功璋男, 教授, 博士生导师。主要研究方向: 综合控制技术, 先进飞行控制技术等。
Tel: 010-82338064
E-mail: shengz@buaa.edu.cn