绳系网捕系统的定位与测姿方法研究
2012-11-03胡真坚鲜勇冯杰雷刚
胡真坚, 鲜勇, 冯杰, 雷刚
(第二炮兵工程学院 603教研室, 陕西 西安 710025)
绳系网捕系统的定位与测姿方法研究
胡真坚, 鲜勇, 冯杰, 雷刚
(第二炮兵工程学院 603教研室, 陕西 西安 710025)
基于双目视觉原理,建立了空间目标的三维坐标计算模型,利用安装在捕获端的摄像头对主星进行观测,建立了捕获端定姿方法。仿真算例验证了所提方法能够以较高的测量精度实现定位和测姿,可以满足绳系卫星捕获端的姿态确定精度需求。
绳系卫星系统; 双目视觉; 定位; 测姿
引言
绳系卫星系统(Tethered Satellite System, TSS)是指由两颗或两颗以上的卫星通过系绳相连所构成的系统。该系统具有广阔的应用前景,如太空发电、人工重力、变轨飞行、处理太空垃圾以及大气层的研究等[1-3]。目前有大量的学者对其控制方法进行了研究[4-7],这些研究均是基于系绳参数精确已知的情况下开展的,而在实际工程应用中,要想实现捕获端实时精细控制,必须掌握捕获端的位置和姿态信息等参数。李强[8]针对应力控制和速率控制方式,对珠式模型和不考虑系绳质量和形状特性的简化模型的动力学特性进行了仿真分析。仿真结果表明,无论采取何种控制方式,都会存在-10°~+10°的面内角,且变化并不规律。目前主要存在以下两个问题:(1)绳系卫星系统的系绳存在面内、外角,将影响子星的姿态;(2)子星在释放过程中由于存在干扰,将引起姿态的变化。因此,捕获端实时参数的获得变得尤为重要。
T S Denney Jr[9]和M E Greene[10]考虑了以三轴张力计为测量信息,通过Kalman滤波方法完成对系绳的面内、外角及其相应角速率的估计,但M E Greene的方法适用于面外摆角为小角度的情况,而T S Denney Jr的滤波算法适合用于系绳参数的离线估计,对于系绳参数的实时估计将会由于计算量太大而无法实现。
目前,国内外对于捕获端姿态的研究并不多。本文基于双目视觉原理,建立了空间目标的三维坐标计算模型,利用安装在捕获端的摄像头对主星的观测建立了捕获端定姿方法。该方法精度较高,可以满足捕获端定姿的精度要求。
1 对捕获端和非合作目标的定位
为了实现双目视觉,对摄像机进行如图1所示的安装。
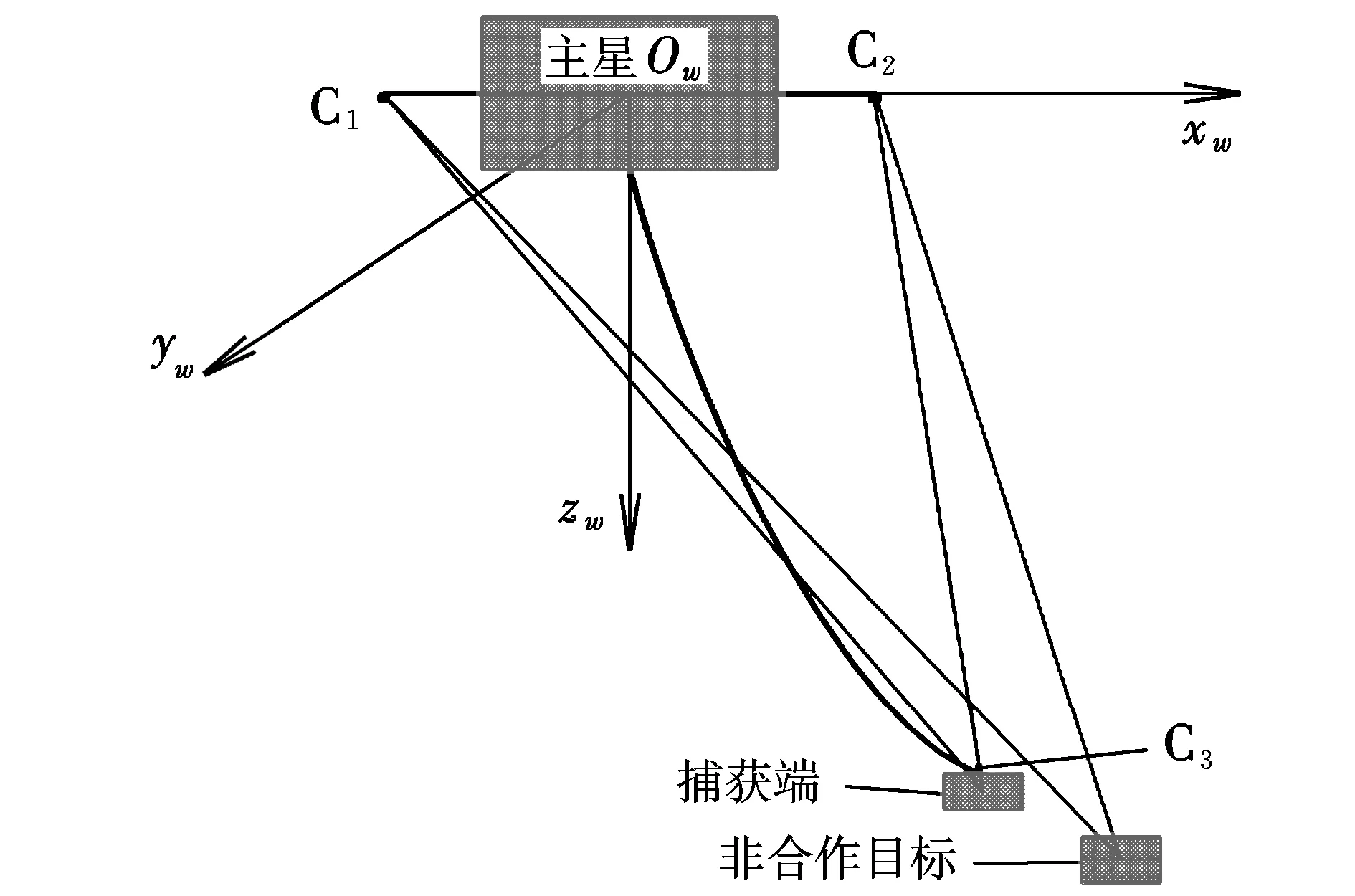
图1 相对位置示意图
建立以主星质心为原点Ow的主星坐标系Owxwywzw,在主星两侧安装两台摄像机C1,C2,使Owxw轴过C1,C2的光心,Owzw轴指向地心方向,Owyw与Owxw,Owzw轴构成右手直角坐标系。在捕获端安装摄像机C3,使其光轴与捕获端垂直,镜头朝向主星一侧,实现摄像机的定姿,具体实现方法在下节介绍。由中心透射原理可得空间点在主星的三维坐标与像素坐标之间的关系为:
式中,z为相机坐标系中的坐标值;u,v为像素坐标系中的坐标值;M1为相机内部参数,只与相机内部结构有关;M2为相机外部参数,只与相机相对于主星坐标系的方位有关;H为3×4矩阵,为透视变换矩阵。上式即为中心透射模型[11-12]。
若同时有两个摄像机的多个对应点,即可形成双目视觉的情况,如图2所示。

图2 双目视觉原理
安装完摄像机后,在绳系卫星系统发射前,在地面采用“TSAI”两步标定算法[13]分别对左右摄像机进行标定。在标定过程中,设定主星坐标系为世界坐标系,获得左右摄像机的内部、外部参数。
利用最小二乘法计算空间目标点A在主星坐标系的三维坐标[11-12]:
其中:

由此可知,如果已知相机的内、外参数,即矩阵H1,H2已知,对任何空间点A(包括捕获端和非合作目标),知道它在图像像素坐标系中的坐标(u1,v1),(u2,v2),就可以由上式计算得到A在主星坐标系的三维坐标,从而实现定位。
2 对捕获端的测姿
绳系系统在空间飞行时,系绳存在面内角(α)和面外角(β),如图3所示。
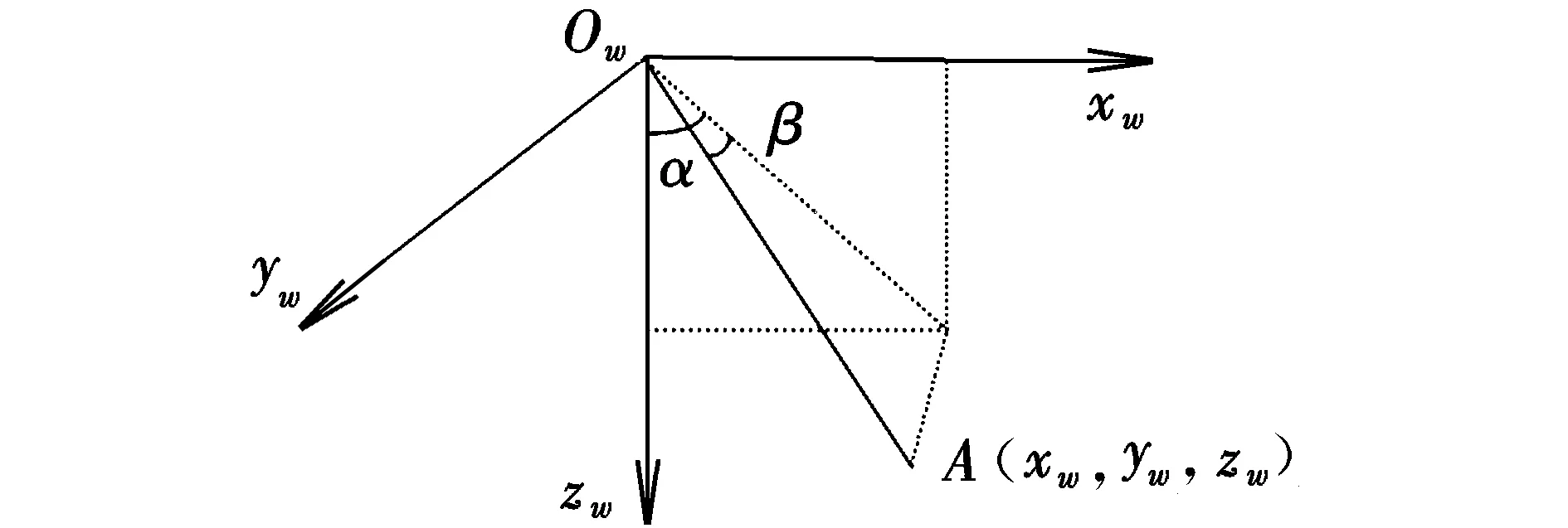
图3 面内、外角示意图

否则,主星可以通过调姿,使C1,C2的光心位于轨道面内。
建立捕获端摄像机C3坐标系,Oxyz为相机坐标系,其原点位于C3的光心,Oy轴沿相机光轴方向,Ox,Oz轴与CCD成像平面边缘平行。同时建立成像平面坐标系Obxbzb,使xb∥x,zb∥z,如图4所示。
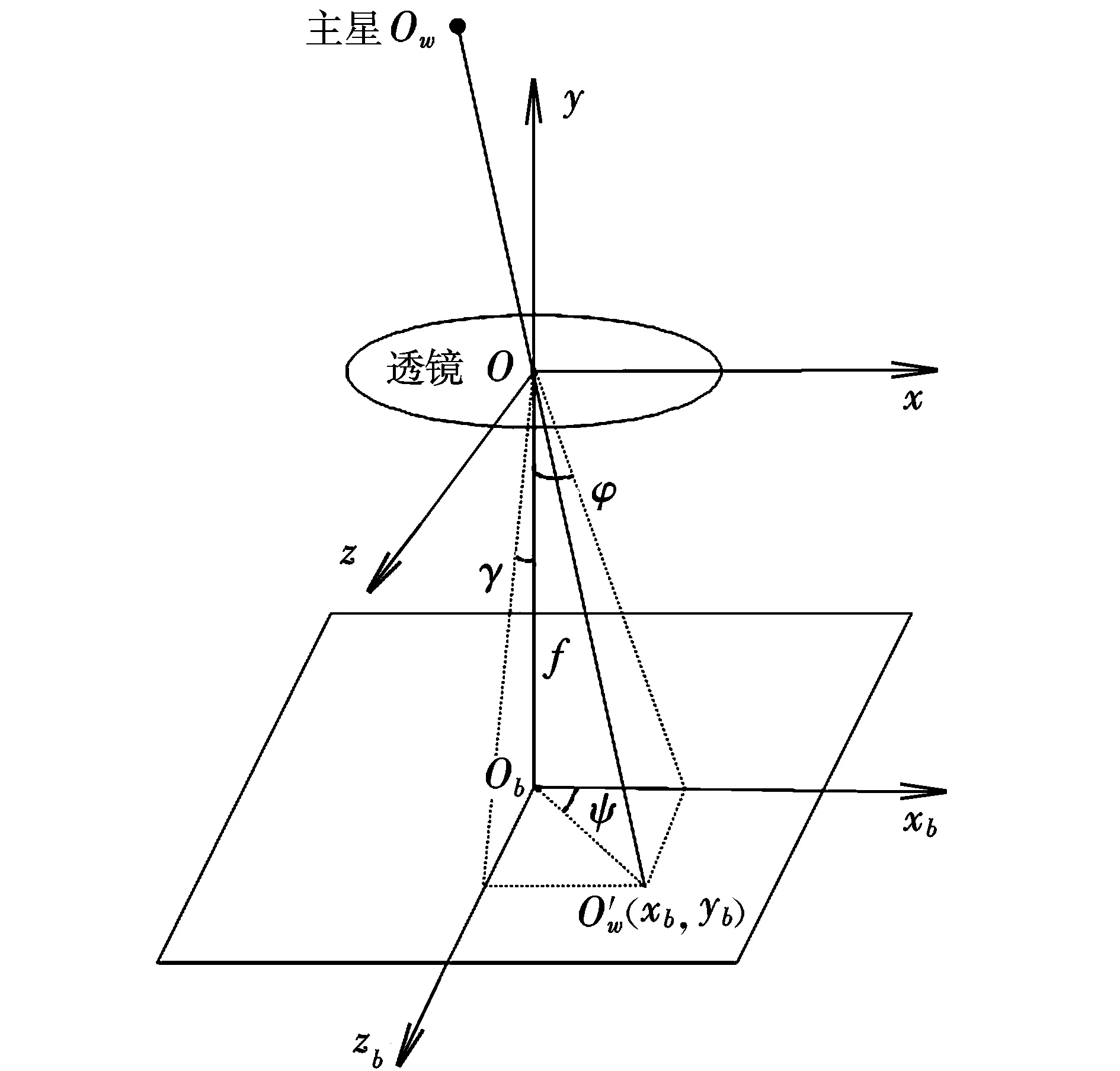
图4 测姿原理图
捕获端的俯仰、偏航和滚动角分别定义为:
俯仰角φ:视线主轴在xbOby平面的投影与相机光轴Oy的夹角。并规定视线主轴在xbOby平面的投影在Oy右侧时(顺着Obzb正方向看去),定义为正,反之为负;
偏航角ψ:视线主轴在xbObzb平面的投影与Obxb轴的夹角。并规定视线主轴在xbObzb平面的投影在Obxb左侧时(顺着Obxb正方向看去),定义为正,反之为负;
滚动角γ:视线主轴在yObzb平面的投影与相机光轴Oy的夹角。并规定视线主轴在yObzb平面的投影在Oy左侧时(顺着Oy正方向看去),定义为正,反之为负。
若捕获端摄像机C3的光轴与捕获端垂直,且成像平面坐标系的Obxb,Obzb轴与捕获端边缘平行,则φ,ψ,γ即为捕获端的俯仰、偏航和滚动角。
当主星位于视线范围内时,由图中几何关系可得:

式中,xb,zb为主星在摄像机C3中的像坐标。当φ=ψ=γ=0°时,相机坐标系Oxyz的Ox,Oz轴分别与主星坐标系的Owxw,Owyw平行,Oy轴与Owzw重合。


式中,α,β以逆时针绕对应轴旋转为正,顺时针为负。因此捕获端自身的姿态角分别为:
3 测姿精度初步分析

表1 测姿最小误差分析
从表1可以看出,该方法测姿精度较高,并且精度随着摄像机分辨率的提高而提高,同时φ和γ的测量精度高于ψ的测量精度。可以满足绳系卫星捕获端的姿态确定精度需求。
4 结束语
本文基于双目视觉原理,探索了绳系卫星系统主星对捕获端和非合作目标的定位方法,建立了空间目标的三维坐标计算模型,并由此获得系绳的面内、外角。利用安装在捕获端的摄像机,通过对主星的观测,实现了捕获端自身姿态的确定。随着绳系卫星空间应用的不断拓展,对系统子星的定位和定姿将会越来越得到大家的关注。
[1] Mantri P,Mazzoleni A P,Padgett D A.Parametric study of deployment of tethered satellite systems[J].Journal of Spacecraft and Rockets,2007,44(2):412-424.
[2] 于绍华,刘强.有分布质量系绳的卫星系统的动力学[J].宇航学报,2001,22(3):52-61.
[3] Kumar K D.Review of dynamics and control of non-electrodynamic tethered satellite systems [J].Journal of Spacecraft and Rockets,2006,43(4):705-720.
[4] Williams P.Optimal deployment/retrieval of tethered satellites[J].Journal of Spacecraft and Rockets,2008,45(2):324-343.
[5] Padgett D A,Mazzoleni A P.Analysis and design for no-spin tethered satellite retrieval[J].Journal of Guidance,Control,and Dynamics,2007,30(5):1516-1519.
[6] Williams P.Spacecraft rendezvous on small relative inclination orbits using tethers[J].Journal of Spacecraft and Rockets,2005,42(6):1047-1060.
[7] Williams P.Optimal deployment/retrieval of a tethered formation spinning in the orbital plane[J].Journal of Spacecraft and Rockets,2006,43(3):638-650.
[8] 李强.空间绳系卫星系统动力学建模及仿真研究[D].长沙:国防科学技术大学,2007.
[9] Denney T S Jr,Greene M E.On state estimation for an orbiting single tether system[J].IEEE Transactions on Aerospace and Electronic Systems,1991,27(4):680-695.
[10] Greene M E,Denney T S Jr.Real-time estimator for control of an orbiting single tether system[J].IEEE Transactions on Aerospace and Electronic Systems,1991,27(6):880-883.
[11] 张娟,潘建寿,吴亚鹏,等. 基于双目视觉的运动目标跟踪与测量[J].计算机工程与应用,2009,45(25):191-194.
[12] 周子啸,赵晓林,胡峰,等. 基于仿真机器人的双目视觉定位[J].视频应用与工程,2010,34(08):106-109.
[13] Tsai R Y.A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J].IEEE Trans Rob Autom,1987,23(3):323-344.
Studyonthepositioningandposturemeasurementforthecaptureoftetheredsatellitesystem
HU Zhen-jian, XIAN Yong, FENG Jie, LEI Gang
(Faculty 603, The Second Artillery Engineering College, Xi’an 710025, China)
This article based on the principle of binocular vision, established a three-dimensional coordinate computation model, and by using camera which is fixed on the capture to observe the main-star to establish the methed for the posture of the capture. Simulation example of the proposed method can achieve high precision of positioning and posture measurement, which meets the requirements of posture measurement for the capture.
tethered satellite system; binocular vision principle; positioning; posture measurement
2011-03-24;
2011-08-04
国家863基金资助(2009AA7042005)
胡真坚(1987-),男,浙江缙云人,硕士研究生,主要从事绳系卫星动力学与控制方面的研究。
V448.2
A
1002-0853(2012)01-0071-03
(编辑:姚妙慧)
