多螺旋桨太阳能无人机横航向操稳特性研究
2012-11-03王睿祝小平周洲
王睿, 祝小平, 周洲
(1.西北工业大学 无人机特种技术国家重点实验室, 陕西 西安 710072;2.西北工业大学 无人机研究所, 陕西 西安 710072)
多螺旋桨太阳能无人机横航向操稳特性研究
王睿1, 祝小平2, 周洲1
(1.西北工业大学 无人机特种技术国家重点实验室, 陕西 西安 710072;2.西北工业大学 无人机研究所, 陕西 西安 710072)
首先分析了大型高空长航时太阳能无人机由于超大展弦比和高效多螺旋桨带来的航向阻尼增量和航向操纵导数,接着分析了由此带来的横航向动态特性变化,并结合多螺旋桨的操纵特性,提出了多桨航向控制方法,最后进行了仿真验证。结果表明,分布式多桨布局对提高该类无人机的横航向稳定性有较大作用,以多桨的转速变化量最小为目标的最优化航向控制分配方法对超长航时飞行很有利。
太阳能无人机; 多螺旋桨; 动态特性; 最优航向控制
引言
太阳能无人机由于不受能源的限制,理论上可以实现“永久飞行”,特别适合执行超长时间的侦察、监视和通信中继等任务,因此是未来无人机的一个重要发展方向。国外已经出现了多种型号的高空长航时太阳能无人机,而国内正处于快速起步阶段[1]。
对于大型高空长航时太阳能无人机,由于太阳能的能量有限,为了实现高空超长航时飞行,需要具有很高的升阻比和推进效率,因此展弦比很大,而且由于单台螺旋桨难以满足大型高空长航时太阳能无人机的动力需求,因此多螺旋桨成为必然选择[2]。最典型的高空长航时太阳能无人机是美国的“太阳神”,其翼展75.3 m,展弦比31,由于太阳能的功率有限,所以最大平飞速度只有51.5 km/h[3],其中的HP01型采用了14个分布式宽弦定距螺旋桨,HP03型采用了10个桨,每个桨直径2 m,航向控制通过外侧8个桨的差动实现[4]。
大直径多螺旋桨以及超大展弦比的布局给大型高空长航时太阳能无人机带来了比常规飞机更明显的附加气动力,影响了太阳能无人机很多方面的特性,在方案设计阶段必须进行充分评估。另外,多桨给航向控制带来了更多选择方案,如何在不影响超长续航时间的前提下进行最优航向控制,也是一个值得研究的关键问题。本文从操稳特性角度出发,首先分析了多螺旋桨产生的附加气动导数,然后分析了其对太阳能无人机横航向动态特性的影响,最后进行了多螺旋桨的最优航向控制研究。
1 附加气动导数分析
本文所研究的太阳能无人机如图1所示。考虑到铺设太阳能电池板以及气动弹性等原因,没有配置副翼,沿翼展方向均布了8个螺旋桨,航向控制通过螺旋桨的差动来实现。为了叙述方便,把对称的两个桨分为一组,从翼根到翼尖分别为δp1~δp4,每一组桨分别标有下标l和r以区分左右两边,下文将该布局简称为“多桨”。为了对比分析多桨对操稳特性的影响,还引入了在对称面上布置单个桨的布局,简称为“单桨”。
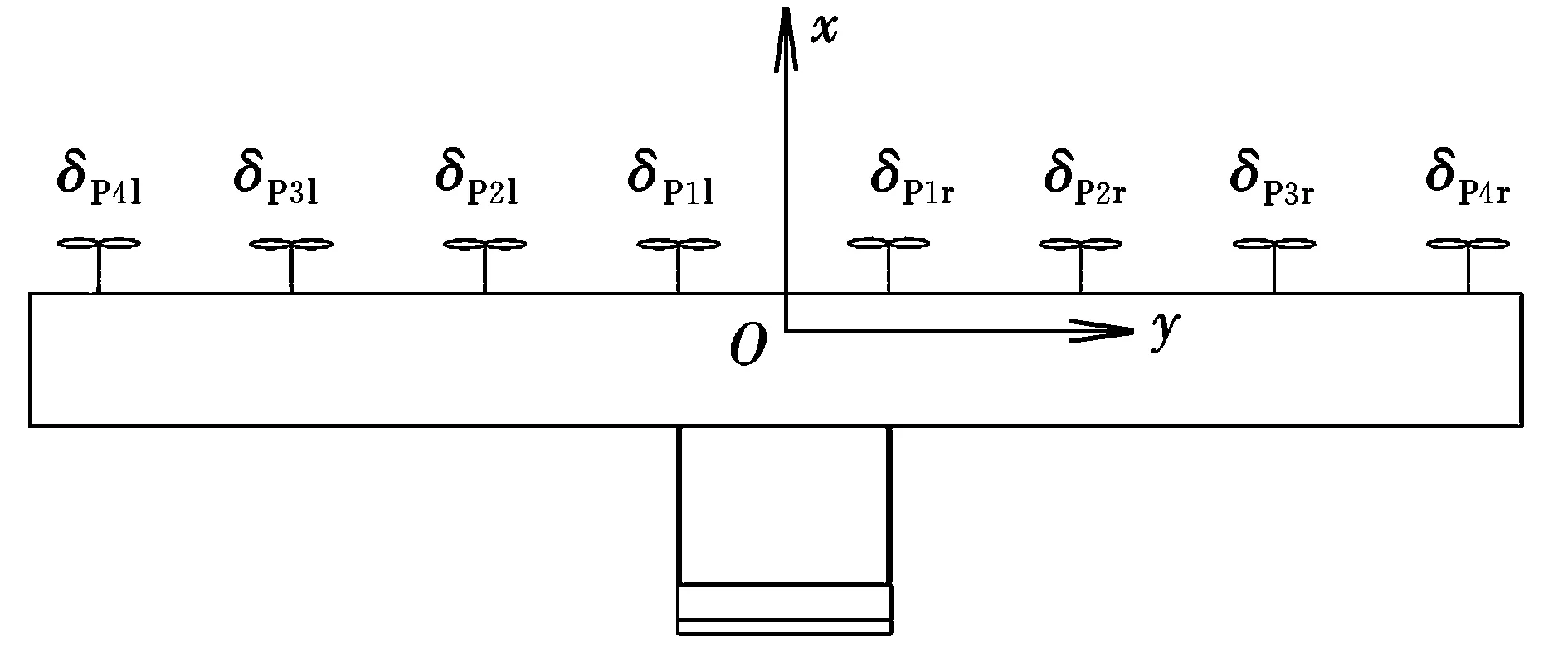
图1 多桨太阳能无人机布局示意图
该无人机所采用的螺旋桨在巡航飞行状态的特性曲线如图2所示。巡航飞行时螺旋桨工作在最大效率的设计点,这时其效率为81%左右,且由图可见,该桨在设计点附近的效率(η)随前进比(J)变化很平缓,推力系数(CT)随前进比的增加基本上是线性减小。

图2 螺旋桨特性曲线
1.1 航向阻尼导数
螺旋桨决定了推力,所以它首先影响了推力对速度的导数;另外,由于展弦比很大,而螺旋桨又是在机翼上均布的,所以当无人机产生偏航角速度时,机翼两边具有较大的飞行速度差,尤其是因为无人机的飞行速度很低,使得该速度差的相对值很大。
当无人机有偏航角速度时,不在重心位置的螺旋桨的相对来流速度发生了变化,所以相对基准状态产生了一个推力增量。由于对电机的控制,可以假设受扰动过程中螺旋桨转速不变,桨之间以及桨与机翼之间没有气动干扰,则推力增量可以表示为:
(1)
式中,i为桨的编号;Tv为推力对速度的导数;v,y,r分别为来流速度、桨到无人机对称面的位置矢量和无人机的偏航角速度。
由推力增量产生的附加偏航力矩为:
(2)
因此,可求得附加的偏航阻尼大导数为:
(3)
在方案的初步设计阶段,可以认为Ixz=0,这时有:
(4)
根据式(3)也可以推导得到附加的偏航阻尼小导数为:

(5)
式中,S,b分别为无人机的机翼面积和展长。
由上式可见,若Tv和y越大,则附加的偏航阻尼导数越大。
(6)
式中,η和P分别为螺旋桨的效率和轴功率。
根据一般的螺旋桨特性曲线[5],在设计点,当转速不变时,有∂η/∂v=0,而且一般∂Cp/∂J<0且是一个绝对值较大的常值。由于太阳能无人机的螺旋桨效率很高而飞行速度很低,所以Tv一般是绝对值较大的负值。
在高空巡航飞行状态,螺旋桨转速不变时,可根据图2和相关公式求得本无人机的Tv,进而可求得单桨和多桨布局的气动导数,如表1所示。

1.2 航向操纵导数


式中,δp为螺旋桨的相对转速差;np为螺旋桨的转速。
假设航向控制过程中飞行速度不变,则有:

(7)

由上面的公式可求得右侧机翼从内到外的各个桨的航向操纵导数Cnδp1r,Cnδp2r,Cnδp3r,Cnδp4r分别为:-0.003 3,-0.009 8,-0.016 4,-0.022 9。
文献[6]中给出了Navion,Beoing 747和某型飞翼的航向操纵导数Cnδr分别为-0.072,-0.090和-0.005。注意到本机的δp∈[0,1],而且多桨具有对称性和叠加性,以及其它方向的耦合操纵力矩很小,因此可知本太阳能无人机多桨差动的航向操纵方式效率较高。
2 动态特性分析
采用纵向和横航向分离的小扰动方程,代入上节得到的由多桨引起的附加航向阻尼导数后,可得到单桨、多桨两种情况的无人机横航向特性,如表2所示。

表2 不同桨布局的无人机横航向特性对比
表中,ξd,ωnd,ξdωnd和T1/2,s分别表示荷兰滚模态的阻尼比、频率、总阻尼和螺旋模态的半衰时,若T1/2,s为负值,则表示该模态是不稳定的,对应的值是倍增时。
由表2可见,从单桨到多桨布局,滚转模态差别很小,荷兰滚模态的频率差别也很小,而荷兰滚模态的阻尼和螺旋模态的阻尼在多桨布局下得到了很大的提高,尤其是使得螺旋模态从不稳定变成稳定的。
以上结论也可以从特征根的简化表达式得到验证。螺旋模态的特征根表达式为[7]:
(8)
荷兰滚模态的阻尼比表达式为:

(9)

3 多螺旋桨的航向控制方法
无人机的航向通过左右两边螺旋桨的差动来实现,而该无人机具有4对螺旋桨,因此需要研究多螺旋桨的优化控制问题。
由于巡航飞行时桨工作在最大效率的设计点,而由图2可见,偏离设计点越大,桨的效率下降越快,平飞所需的能量也将越大。因此为了进行超长航时飞行,航向控制时,希望在满足操纵转矩需求的前提下,所有桨的转速变化量(总控制量)最小。用数学语言描述该最优控制问题为:
(10)
式中,Bp为螺旋桨的航向操纵矩阵;nd为期望的航向操纵转矩,可以根据控制目标采用多种控制方法得到。
(11)
把式(11)代入式(10),并根据拉格朗日乘子法,可求得上述最优化问题的解为:

(12)
根据式(7),考虑到每个电机、螺旋桨的规格相同、初始工作状态相同而且等距、对称地布置在机翼上的特殊情况(本无人机的配置),最优化控制量为:
(13)
4 仿真验证
当只用螺旋桨差动进行航向控制时,根据文献[8]中的虚拟舵控制律设计方法得到nd,然后采用式(13)的最优控制分配方法,得到在180°转弯时的无人机响应和右侧机翼的螺旋桨相对差动量分别如图3和图4所示。

图3 180°转弯时的无人机响应
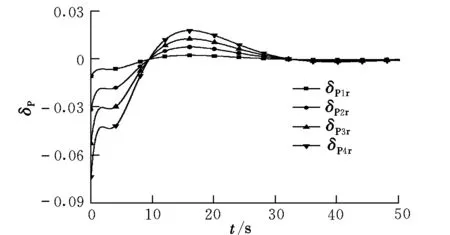
图4 180°转弯时的右侧螺旋桨操纵量
由图可见,无人机的参数响应合理,而且通过分析发现,初始时刻桨的前进比J平均变化量为5.6%,这时的桨效率下降1%左右,而在3 s后J偏差很快下降到0.4%以内,桨效率下降在0.2%以内。这是在航向角控制量较大的情况下得到的,如果减小航向控制量,或者进行控制输入的淡化处理以减小初始控制量[9],还能进一步减小桨的差动控制量,说明了所提出的长航时飞行条件下的多桨差动航向控制分配方法可行。
5 结论
根据本文分析,得到了以下结论:
(1)基于螺旋桨效率曲线的拉力差计算能够得到由螺旋桨产生的附加偏航阻尼导数和航向操纵导数。采用该方法分析发现,本文所研究的大型高空长航时太阳能无人机由于超大展弦比、低飞行速度、高效率分布式多螺旋桨的布局使航向阻尼明显增大,多桨差动的航向控制效率也较高;
(2)多螺旋桨引起的航向阻尼增量使该类型无人机的荷兰滚模态阻尼和螺旋模态的稳定性都明显增加;
(3)所提出的以桨的转速变化量最小为目标的最优化航向控制分配方法,能以最小的螺旋桨差动量进行有效的航向控制,对螺旋桨工作在最大效率点的超长航时飞行很有利。
[1] 高广林,李占科,宋笔锋,等.太阳能无人机关键技术分析[J].飞行力学,2010,28(1):1-4.
[2] Giulio Romeo,Giacomo Frulla.Heliplat:aerodynamic and structural analysis of HAVE solar powered platform [R].AIAA 2002-3504,2002.
[3] 《国外无人机大全》编写组.国外无人机大全[M].北京:航空工业出版社,1999.
[4] Thomas E Noll,Stephen D Ishmael,Bart Henwood,et al.Investigation of the helios prototype aircraft mishap,volume I-mishap report [R].NASA Report,2004.
[5] 《飞机设计手册》总编委会.飞机设计手册(第13册):动力装置系统设计[M].北京:航空工业出版社,2006.
[6] 马松辉,吴成富,陈怀民.飞翼飞机稳定性与操纵性研究[J].飞行力学,2006,24(3):17-21.
[7] 方振平,陈万春,张曙光.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社,2005.
[8] 王鹏.飞翼式长航时无人机轮式起降控制技术研究[D].西安:西北工业大学,2009.
[9] 申安玉,申学仁,李云保,等.自动飞行控制系统[M].北京:国防工业出版社,2003.
Researchonlateral-directionalflyingqualitiesofmulti-propellersolarpoweredUAV
WANG Rui1, ZHU Xiao-ping2, ZHOU Zhou1
(1.National Key Laboratory of Science and Technology on UAV, NWPU, Xi’an 710072, China;2.UAV Research Institute, NWPU, Xi’an 710072, China)
This paper analyzed additional derivatives of the yaw damping and control resulted from multi-propeller and large aspect-ratio wing for the high altitude long endurance (HALE) solar powered UAV, and then carried out further researches on the difference between LAT-DIR dynamic properties, then, an optimal yaw control allocation method for the purpose of minimizing the total rotate speed of multi-propeller was proposed and validated by simulation. The results show that the large aspect-ratio wing integrated with multiple propellers can improve its LAT-DIR stabilities significantly, and the proposed optimal yaw control allocation method is very favorable for long endurance flight.
solar powered UAV; multi-propeller; dynamic property; optimal yaw control
2011-04-08;
2011-09-08
国防基础科研基金资助(A2720060290);中国博士后科学基金资助(20100471637)
王睿(1981-),男,广西百色人,博士,研究方向为无人机飞行动力学与控制;祝小平(1963-),湖南衡阳人,教授,博士生导师,主要研究方向为无人机系统总体设计、控制与制导。
V212; V279
A
1002-0853(2012)01-0005-04
(编辑:姚妙慧)
