一种复合升力飞机模型的设计与飞行验证
2012-11-03曹飞詹浩
曹飞, 詹浩
(西北工业大学 航空学院, 陕西 西安 710072)
一种复合升力飞机模型的设计与飞行验证
曹飞, 詹浩
(西北工业大学 航空学院, 陕西 西安 710072)
针对一种复合升力飞机,建立了相应的研究模型,通过试验、CFD计算和工程估算的方法,研究了直升机和固定翼状态下的飞机性能特性,并通过制作一架模型验证机,验证了该种飞机飞行原理的可行性,并提出了一些意见。
复合升力飞机; 性能特性; 飞行原理
引言
受前行桨叶压缩性的影响及后行桨叶气流分离的限制,常规直升机的最大巡航速度通常在300 km/h左右。固定翼飞机可以具有很高的飞行速度,但是一般需要一定长度的跑道进行滑跑起降,且不能进行悬停和较低速度的飞行。如果有一种飞行器能够兼备直升机和固定翼飞机的优点,则其在民用和军事上将具有非常广阔的应用前景。正因为这样,长期以来,国内外学者一直在不懈地探寻新的技术发展思路,力图研制一种复合升力飞行器,该飞行器既能够保持直升机垂直起降、悬停等机动灵活的特点,又能达到固定翼飞机的高速飞行性能。
本文提出的复合升力飞机有一副既可高速旋转当做旋翼,又可锁死为固定翼的机翼,使其既可像直升机那样垂直起降和定点悬停,又可拥有固定翼飞机的高速巡航性能。该飞机的出现较好地克服了以前传统的以发动机推力转向和倾转旋翼方式进行垂直起降的高速飞机技术所带来的缺点,它具有结构简单、可维护性好、造价低廉、起降区域限制低的优点[1]。
本文通过设计一架复合升力模型验证机,研究其直升机状态下主机翼的气动特性和固定翼状态下鸭翼、尾翼配平时对全机纵向特性的影响,并通过模型试飞验证了该布局的飞行原理可行性。
1 总体方案的提出
本文提出的复合升力飞机模型布局如图1所示。在固定翼状态,该机采用鸭翼、尾翼和主机翼作为飞机高速前飞时所需的升力面,这种三翼面布局通过获得理想的升力分布,可使其在巡航状态下获得最小的诱导阻力,从而使整机拥有较高的升阻比[2]。
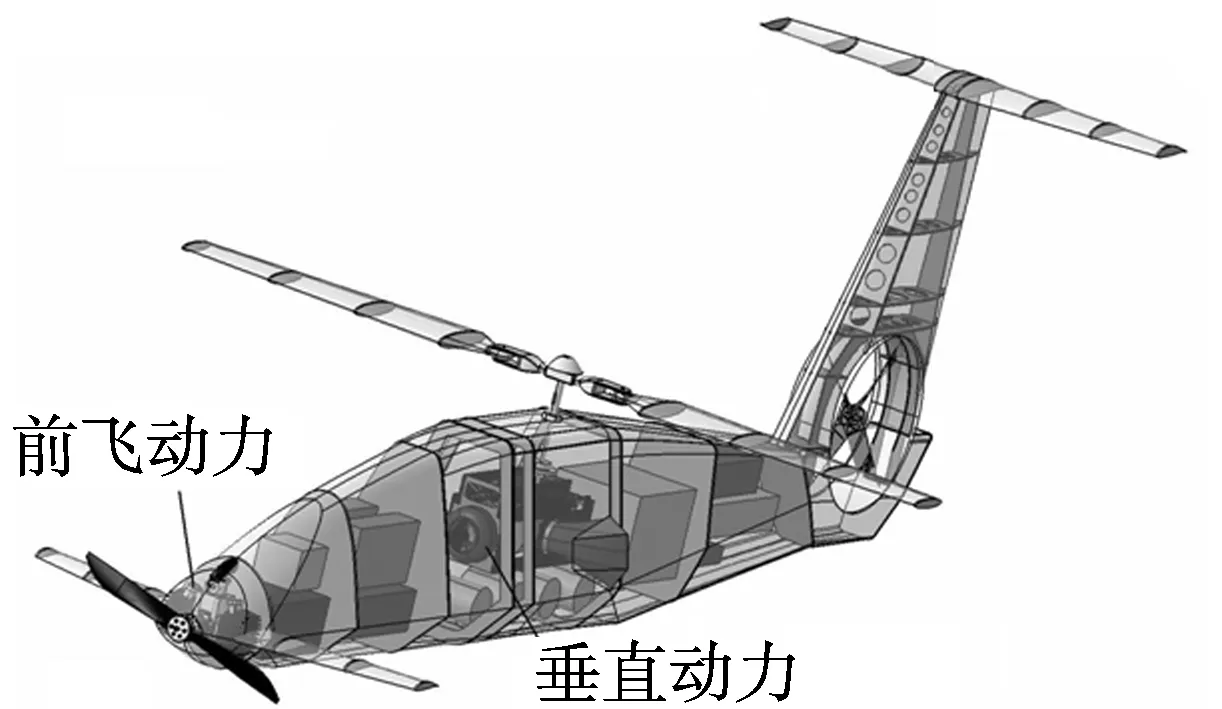
图1 复合升力飞机模型样机
在直升机状态,飞机的主机翼通过高速旋转使飞机可以垂直起降和悬停,并进行小速度前飞。主机翼旋转的驱动力可采用轴驱动和桨尖喷气驱动两种方式,该机采用轴驱动方式,垂尾处布有抵消反扭矩的尾桨。为了兼顾固定翼的前飞性能,主机翼展弦比比传统直升机要小。因此在直升机状态下飞行时,飞机的桨盘载荷高,桨盘下洗速度大。为了减少旋翼尾迹对平尾的影响,增加飞机的稳定性,尾翼采用高置T尾形式。
在过渡飞行状态,随着前飞速度的增加,飞机鸭翼和尾翼进行偏转,产生升力使主机翼进行卸载。当鸭翼和尾翼产生的升力足以平衡飞机重力时,主机翼完全卸载,慢慢停转并与机身锁死。主机翼由锁定到高速旋转的过渡过程则相反。
该模型飞机的总体设计参数如下:旋翼/机翼展长为1.30 m;鸭翼、尾翼展长均为0.64 m;机翼总面积为0.22 m2;机长为2.20 m;设计最大起飞重量为10 kg;前拉动力功率为2 kW;旋翼动力功率为4 kW;设计升力系数为0.8。
2 发动机的解耦设计
该布局飞机的动力系统通常由一台发动机和一套特殊的排气系统组成。飞机的起降和过渡飞行都是通过换气阀的转换来获取所需的垂直动力和前飞动力,于是这种飞行-推进耦合在一起的推进方式成为该类飞机研究的关键。但是在技术探索和小比例模型技术验证机设计阶段,这种复杂的推进系统对该布局飞机的方案设计造成了巨大的困难。为此对其推进系统进行解耦设计,即通过两台不同的发动机分别提供飞机所需的垂直和前飞动力。虽然这种设计方式在飞机的不同状态下必有一台发动机成为全机重量中的多余重量,但降低了推进系统设计的复杂度,也不会对飞机过渡飞行产生任何影响,而且在任意一台发动机发生意外停车后不会因为动力不足而导致验证机的坠毁,直接降低了技术验证机的试飞风险。
3 直升机状态特性的估算与分析
3.1 旋翼翼型的选取
由于该种飞机的主机翼既当旋翼又当固定翼,这种特点决定了其机翼只能使用特殊的前后对称翼型,而椭圆翼型是前后对称翼型中最简单的一种。
在无弯度的情况下,相对厚度越大的椭圆翼型失速迎角越大,最大升力系数和阻力系数也越大。在同等厚度下,无弯度翼型的抬头力矩要高于有弯度的翼型,所以在主机翼充当旋翼时,在具有同等升力系数的情况下,有弯度翼型的旋翼所需的变距操纵力的角度小于无弯度翼型的机翼。虽然有弯度的椭圆翼型升力特性要优于无弯度的翼型,但其阻力特性和最大升阻比要劣于无弯度的翼型[3-4]。
本文中的主机翼采用14%厚度无弯度椭圆翼型。主要考虑过渡飞行状态,当总矩为零时,高速旋转的无弯度翼型机翼拉力刚好为零,可以使主机翼完全卸载。而选用有弯度翼型,在卸载时为使主机翼拉力为零,需要进行复杂的总矩和周期变矩调节,增加了飞机飞行控制的复杂度。
3.2 旋翼气动特性的估算
通过对椭圆翼型旋翼的地面旋转试验和对旋翼参数进行无因次化处理[5],给出了在不同的桨尖马赫数下,总矩(变化范围在8°~14°之间)、拉力系数(CT)和功率系数(MK)之间的关系,如图2所示。
由图2可知,飞机在直升机状态,主机翼为了拉起同样的起飞重量,桨尖马赫数越高,需用总矩值越低,需用功率越高。桨尖马赫数在0.24~0.34时,该机主机翼需用功率都在选用发动机功率范围内,需用总矩值在设计最大总矩范围内,满足设计要求。
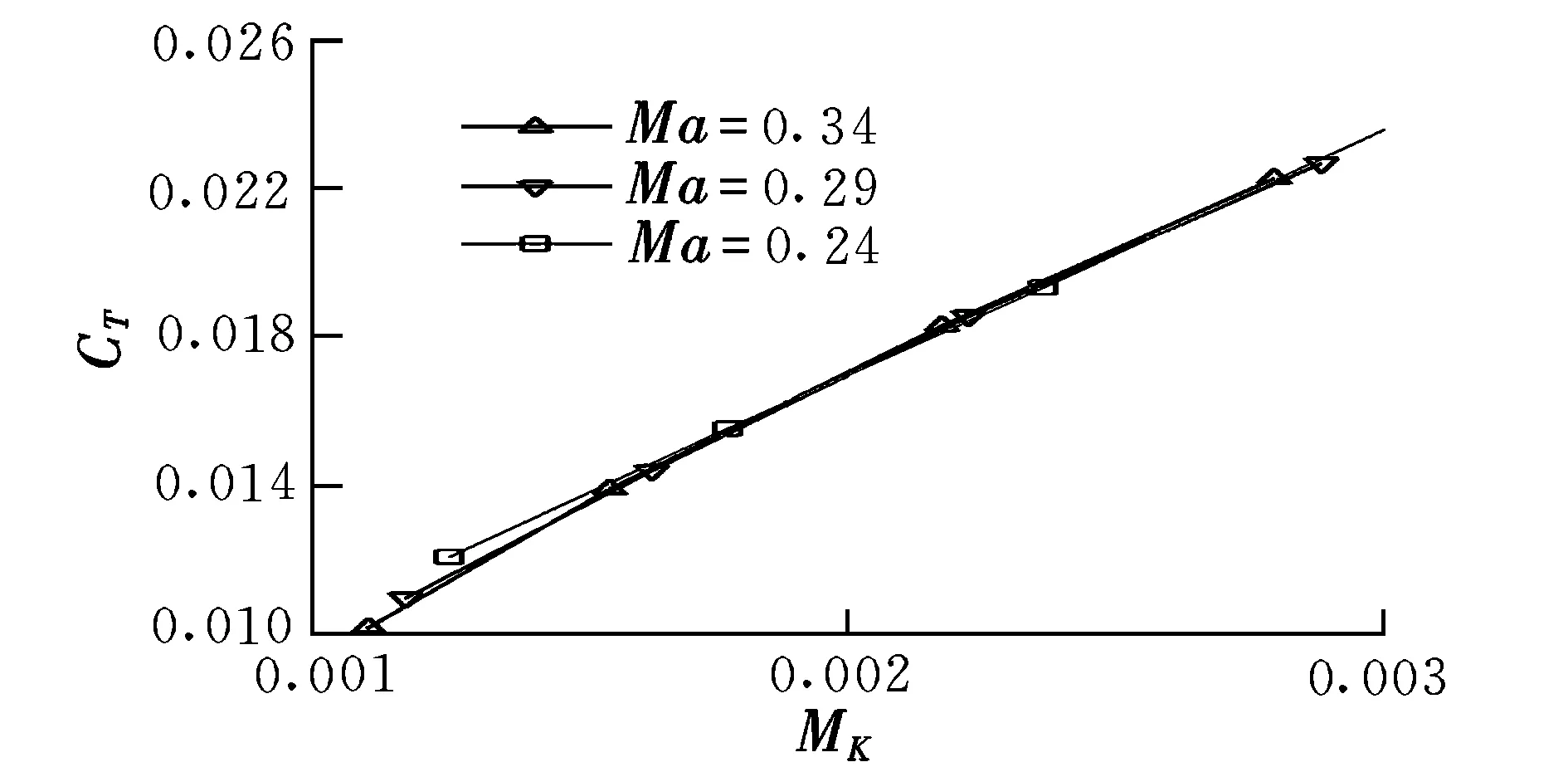
图2 拉力系数和功率系数曲线
4 固定翼状态特性的估算与分析
4.1 干净构型升阻特性
本文通过CFD计算方法获得全机固定翼状态下干净构型的升阻比。CFD利用N-S方程计算程序,Fluent求解器进行求解。全机升阻比随迎角的变化曲线如图3所示。由图3可知,该机干净构型在30 m/s的巡航速度下,全机迎角在8°左右可获得全机最大升阻比。
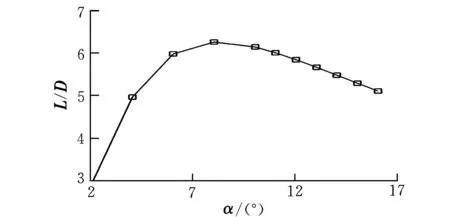
图3 全机升阻比随迎角的变化曲线
4.2 操纵面布置
由于主机翼的特殊工作方式使其翼面上无法布置操纵面。在进行固定翼飞行时,全机的纵向配平就由另外两个升力面承担。所以研究鸭翼、尾翼是否拥有足够配平能力对该布局飞机试飞很重要。
该模型由鸭翼操纵面和尾翼操纵面4个控制面控制模型飞机的纵向配平。控制面弦长占机翼弦长的30%,展向位置为半展长的34%~90%。控制面布置如图4所示。

图4 控制面布置
4.3 纵向配平构型的升阻特性
飞机在配平构型下的升力、诱导阻力、纵向静稳定度以及配平舵偏角采用涡格法计算程序求解[6]。在不考虑控制面之间相互干扰的情况下,因配平舵偏角引起的零升阻力用下式求解[7-8]:
ΔCD0δi=(∂ΔCD0/∂δi) cosΛ1/4ScsSrefδi
式中,ΔCD0δi为配平舵偏角引起的零升阻力增量;∂ΔCD0/∂δi为控制面零升阻力随舵偏角偏转的变化率,与控制面类型有关,鸭翼、尾翼操纵面均为升降副翼,取 0.0025/(°);Λ1/4为机翼1/4弦线后掠角;Scs为控制面面积;Sref为机翼参考面积;δi为操纵面舵偏角。
采用鸭翼操纵面和尾翼操纵面分别进行纵向配平控制时,为了配平飞机的低头力矩,鸭翼操纵面需下偏,尾翼操纵面需上偏。
图5~图7给出了干净构型和各操纵面单独配平时的纵向特性曲线。
由图5~图7可知,在各设计升力系数下,鸭翼配平的全机升阻比要大于尾翼配平的全机升阻比,这是由于尾翼面积大于鸭翼面积,尾翼配平时产生了较大的诱导阻力;鸭翼操纵面的配平舵偏角要比尾翼操纵面的配平舵偏角大,主要是由于鸭翼的纵向配平力臂比尾翼的纵向配平力臂小;鸭翼配平时降低了配平迎角,尾翼配平则增大了配平迎角,这是由于鸭翼和尾翼单独配平时一个产生正升力,一个产生负升力。
鸭翼、尾翼操纵面组合配平时的全机升阻特性(CL=0.8)如图8所示。图中,δC为鸭翼舵偏角,δH为尾翼舵偏角。由图可知,当鸭翼操纵面由0°逐渐下偏,尾翼操纵面逐渐由单独配平最大舵偏角下偏时,配平升阻比逐渐提高;当鸭翼舵偏角偏到6°,尾翼舵偏角偏到-4°左右时,全机达到最大配平升阻比;当鸭翼操纵面下偏超过单独配平最大舵偏角时,将产生多余的抬头力矩,尾翼操纵面继续下偏,产生低头力矩,平衡全机的纵向力矩,此时鸭翼、尾翼均产生正的配平升力,但全机配平升阻比随配平阻力的增加继续降低,而全机配平迎角则始终是降低的。

图5 配平升阻比
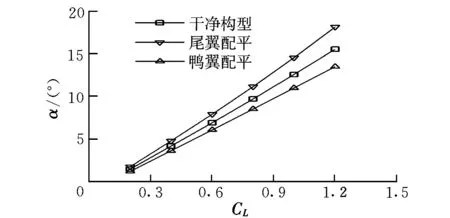
图7 配平迎角
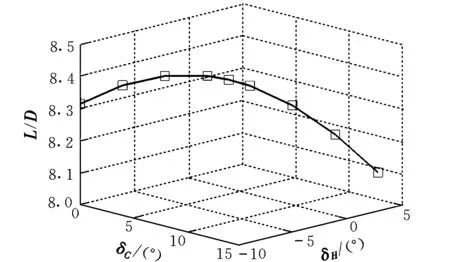
图8 鸭翼、尾翼操纵面组合配平特性
通过鸭翼、尾翼操纵面组合进行全机纵向配平后,全机配平升阻比比单独鸭翼配平和尾翼配平分别提高了1.0%和1.2%; 配平迎角比鸭翼单独配平提高了11.36%,比尾翼单独配平降低了13.76%。
4.4 纵向配平静稳定特性

图9 组合配平纵向静稳定度
图9为组合配平纵向静稳定度曲线。由图9可知,鸭翼和尾翼组合配平时(CL=0.8),全机纵向静稳定度随鸭翼操纵面的舵偏角增大而降低,改变纵向静稳定度的原因是由于操纵舵面的偏转引起了鸭翼和尾翼的升力线斜率发生变化。在最大组合配平升阻比下的静稳定度值介于尾翼、鸭翼单独配平的静稳定度值之间。
5 飞行原理验证与分析
为了验证该布局飞机的飞行原理可行性,按总体设计参数制作了等尺寸的模型样机,该飞机通过两套无线电遥控系统分别控制直升机系统和固定翼系统。通过直升机状态、固定翼状态和组合状态进行飞行验证。通过飞行试验可知,飞机在直升机状态飞行时,前拉发动机处于待速状态,通过旋翼动力驱动桨叶。由于鸭翼、尾翼面积较小,机身长度大,鸭翼、尾翼受旋翼干扰较小,飞机可具有与直升机一样的飞行性能。
飞机在固定翼状态模式下飞行时,分别对鸭翼、尾翼操纵面进行单独和组合配平控制,结果符合文中分析的特性,其飞行性能也比直升机状态要好。
飞机在过渡状态模式下飞行时,由于旋翼系统采用模型成品,而且没有加装旋翼固定锁死机构,因此在进行过渡飞行时只能通过旋翼发动机减速来模拟旋翼卸载飞行。初始时,旋翼转速较高,飞机固定翼舵面操控性较差,需与直升机操纵机构组合控制。在旋翼转速降低后,固定翼舵面操纵性提高,但直升机系统的平衡小翼会引起主旋翼偏转,造成飞机左右两侧升力不平衡,增加了飞机飞行控制的难度。
通过飞行试验发现,飞机在直升机和固定翼状态下具有良好的可控性,在旋翼/固定翼过渡状态下需要固定翼与旋翼的操纵系统组合控制飞机,其控制难度较高,应该通过旋翼减速锁定装置缩短过渡飞行时间。最终证明这种拥有直升机起降特性并能进行固定翼飞行的新式飞行原理是可行的。
6 结论
(1)通过计算发现,鸭翼参与配平会降低全机静稳定度,但可以降低全机配平迎角,提高全机升阻比和操纵响应。
(2)鸭翼、尾翼组合配平模式比单独配平模式可以获得更高的升阻比等优势,对于更高级别的该布局飞机布置多组控制面配平将成为研究重点。
(3)由于旋翼/固定翼过渡状态存在较强的非定常和非线性的气动特点,通过模型验证机的飞行测试可以成为了解其特性的一种方法。并且旋翼系统及锁定机构的设计也成为以后工作的研究重点。
[1] 邓阳平,高正红,詹浩.鸭式旋翼/机翼飞机的技术发展及其关键技术[J].飞行力学,2006,24(3):1-4.
[2] Steven M Bass,Thosmas L Thompson,John W Rutherford.Fixed-wing performance predictions of the canard rotor/wing concept based on wind tunnel test results[R].AIAA 95-1887,1995.
[3] 詹浩,邓阳平,高正红.椭圆翼型低速气动特性研究[J].航空计算技术,2008,38(3):25-27.
[4] 邓阳平,高正红,詹浩.两种椭圆翼型高速气动特性试验研究[J].实验力学,2009,24(2):103-107.
[5] 王适存.直升机空气动力学[M].南京:南京航空航天大学出版社,1993.
[6] Margason R J,Lamar J E.Vortex-latticefortran program for estimating subsonic aerodynamic charateristics of complex planforms[R].NASA TN D-6142,1971.
[7] 高浩.飞行动力学——飞机的操纵性与稳定性[M].西安:西北工业大学出版社,2001.
[8] 《飞机设计手册》总编委会.飞机设计手册(第6册):气动设计[M]. 北京:航空工业出版社,2002.
Researchonconceptuallayoutdesignandflighttestforamultimodeaircraft
CAO Fei, ZHAN Hao
(College of Aeronautics, NWPU, Xi’an 710072, China)
In this paper, a multimode aircraft research model is built. The rotor mode and fix wing mode’s performance characters that have been researched by the experiment, CFD and the project evaluation methods. According to the aircraft flight test verification, the way of flight of the multimode aircraft is feasible, and provides some suggestions for improving its performance.
multimode aircraft; performance characteristics ; flight principle
2011-04-27;
2011-10-18
曹飞(1987-),男,北京人,硕士研究生,研究方向为飞行器设计。
V221
A
1002-0853(2012)01-0009-04
(编辑:姚妙慧)
