空气悬架系统控制策略仿真研究
2012-10-25时培成
周 永,时培成
空气悬架系统控制策略仿真研究
*周 永,时培成
(安徽工程大学机械与汽车工程学院,安徽,芜湖 241000)
针对空气悬架系统,分别建立了基于模糊控制和PID控制的仿真模型。通过仿真,对比了两种不同控制策略空气悬架的簧载质量振动加速度、车轮动载荷以及悬架的动行程的动态变化。结果表明,模糊控制的空气悬架在车辆的操纵性、平顺性和安全性等基本性能的控制上优于PID控制的空气悬架。本文的研究结果可以为空气悬架的实验研究以及产品开发提供一定的理论参考。
空气悬架;模糊控制;PID控制;仿真
随着汽车工业的发展以及我国高速公路网的完善,汽车的操纵稳定性、高速行驶的平顺性和轮胎与路面的接地性等将越来越受到人们的重视。安装空气悬架的车辆比装有普通弹簧悬架的车辆具有更高的乘坐舒适性和操纵稳定性,并且可以改善轮胎与路面的接地性,降低对路面的破坏,提高对货物的保护。所以,研究空气悬架具有实际意义。本文将对空气弹簧的力学特性和空气悬架整体的动力学原理进行仿真和分析,通过对比采用模糊控制策略的空气悬架与采用PID控制策略的空气悬架在簧载质量振动加速度、车轮动载荷以及悬架的动行程等关键评价指标的动态变化,来探讨不同控制方式的控制效果。
1 空气悬架的数学模型
1.1 1/4悬架模型
二自由度汽车模型不但具有分析行驶平顺性的必要条件,而且结构简单易懂,被广泛应用于悬架控制策略的研究。所以本文也应用二自由度的1/4汽车模型[1],如图1所示。

图 1 二自由度悬架模型
该模型的运动微分方程由牛顿第二运动定律可得,如下式所示:


其中空气弹簧刚度(此刚度可变)是气囊内压力的非线性连续函数用k表示,轮胎的径向刚度用k表示,减振器的阻尼系数用C表示,路面的激励为x、非簧载质量位移为x,簧载质量位移为x,非簧载质量为m,簧载质量为m。
1.2 路面激励模型
在分析研究悬架在时域内的动态特性时,一般把频域内路面的不平度统计特性转化成时域内的时间序列。生成随机路面时间轮廓(路面的粗糙度),一般可用积分器根据单位白噪声得到该路面输入。表达式为:

其中单位白噪声用()表示。

1.3 空气囊模型[2-3]
空气弹簧内的压缩气体的压力决定了空气弹簧的支承和弹性作用,可描述为:

式中为气体压力;为气囊容积;为指数,由弹簧的变形速度决定,变形速度慢时取=1,此时是等温过程;变形速度快时取=1.4,此时是绝热过程。
用表示空气弹簧的承载力,其表达式为:
空气弹簧承载力对弹簧行程求导得到空气弹簧的刚度k如下式所示:

其中,p表示气囊的工作时的压力;A表示气囊工作的有效面积,p表示气囊内的最初压力。
由 (6)式可知,气囊的工作有效面积A、压力p和容积决定了刚度k。当压力p已知时,若要降低空气弹簧的刚度,可通过增大空气囊的容积,减小气囊工作有效面积的变化率来实现。
2 空气悬架的仿真模型
2.1 路面仿真模型[4]
根据路面激励模型,在SIMULINK中建立的路面仿真模型如图2所示;对图2进行调整,可得到路面输入的精简模型,如图3所示。
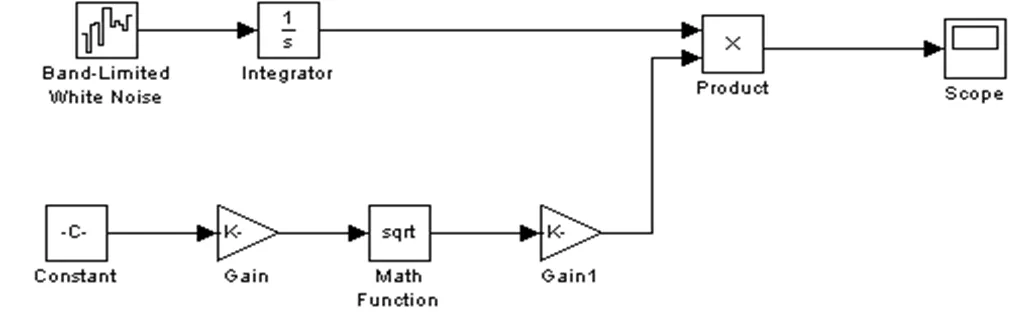
图2 随机路面输入的MATLAB模型

图3 随机路面输入的MATLAB精简模型
在MATLAB中运行,得到路面不平度的仿真曲线如图4所示(其中横坐标为时间s,纵坐标为垂直位移m)。
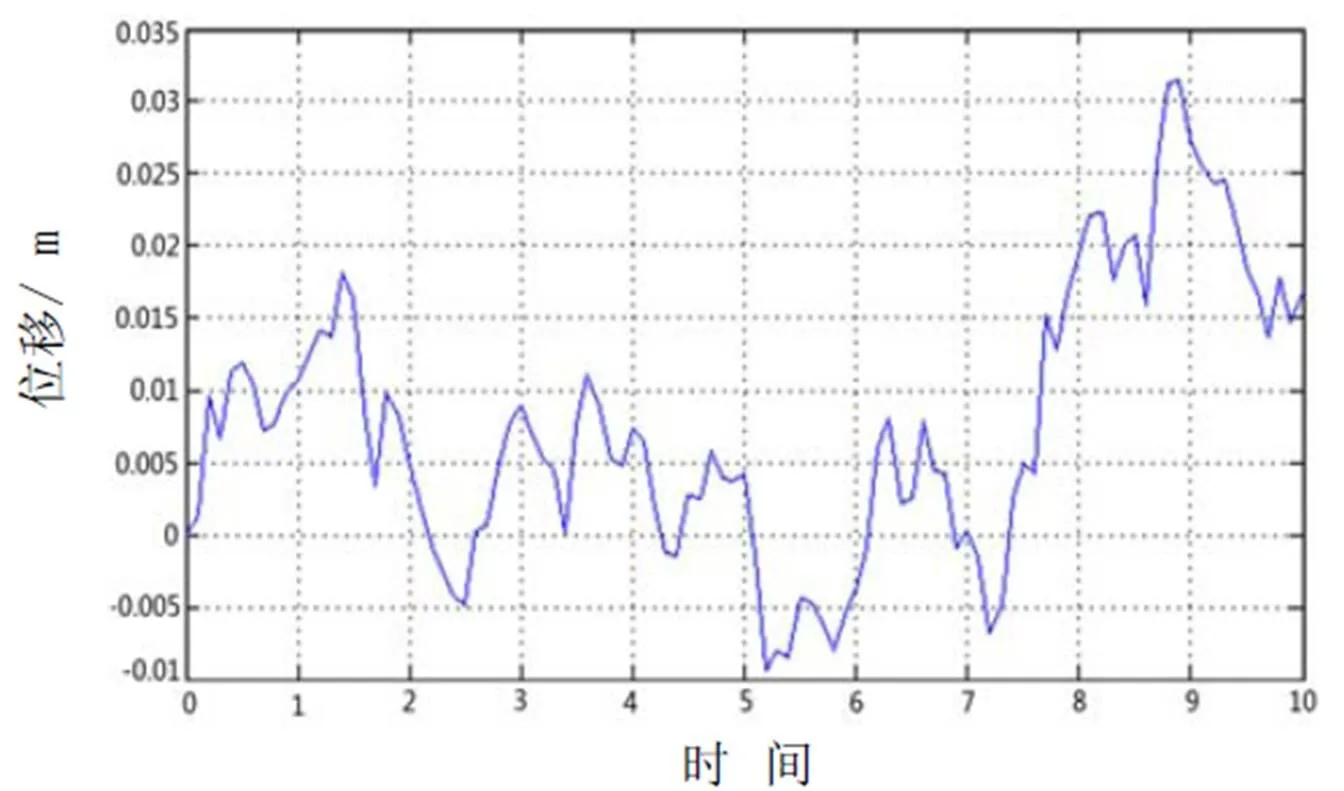
图4 路面不平度仿真曲线
2.2 空气悬架仿真模型
2.2.1悬架性能评价指标的选取
在悬架研究中,常用簧载质量垂向振动加速度、悬架的动行程、车轮的动载荷等较为简单直观的方法评价悬架性能。簧载质量垂向振动加速度直接反映了汽车的行驶平顺性(舒适性)。汽车总体设计运动空间限制了悬架上弹簧的动行程也就是动挠度。悬架的限位行程为从车身平衡位置起所允许的悬架最大压缩行程。在既定的运动空间下,如果悬架的弹簧动行程过大,在行驶中撞击限位块的概率将变大,从而降低了行驶平顺性,汽车的操纵稳定性也将受到不利影响。车轮和路面的附着效果直接受到车轮动载荷的影响,如果车轮静载荷的幅值小于动载,此时轮胎的法向载荷将小于零,这时将出现车轮跳离地面的现象,致使纵向附着力和侧向附着力丢失,将大大降低行驶安全性和操纵稳定性。
2.2.2 模糊控制空气悬架系统模型

图5 空气悬架的模糊控制仿真模型
2.2.3 PID控制空气悬架系统模型
3 控制策略比较研究
基于上述建立的模型和控制策略,为对比不同控制策略的有效性,仿真模拟了三种汽车行驶工况即(1)B级路面车速50 km/h;(2)B级路面车速120 km/h;(3)E级路面20 km/h。这三种工况包含了较好路面的正常车速行驶;较好路面的高速行驶以及较差路面的行驶。分别对模糊控制悬架和PID控制悬架在上述三种工况下进行仿真,得簧上质量垂向振动加速度时间历程见图7~图9;车轮动载荷见图10~图12;悬架的动行程见图13~图15,图中细实线表示PID控制结果,粗实线表示模糊控制结果。
3.1 簧载质量振动加速度
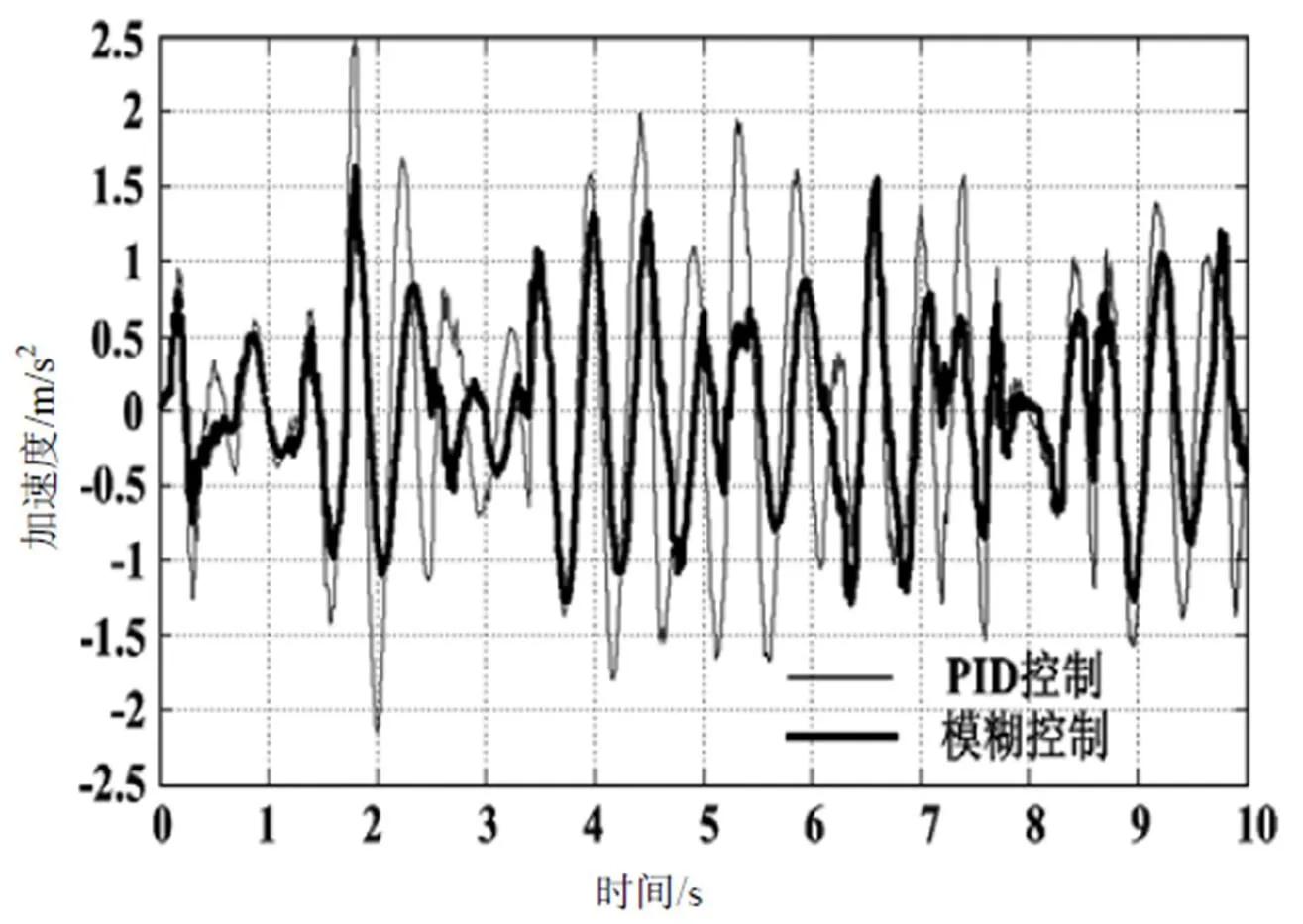
图7 B级路面车速50km/h簧载质量振动加速度

图8 B级路面车速120 km/h簧载质量振动加速度

图9 E级路面车速20 km/h簧载质量振动加速度
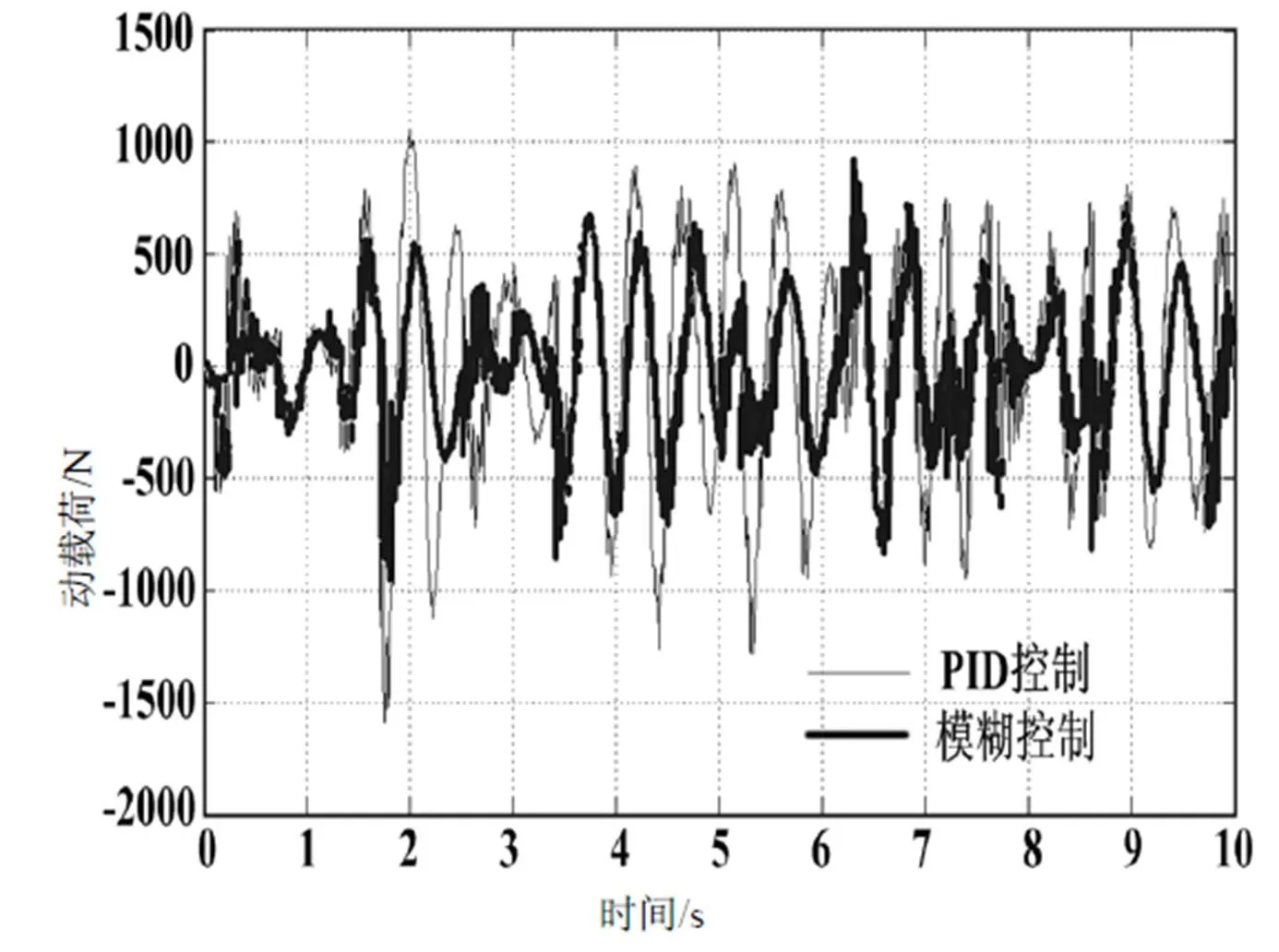
图10 B级路面50km/h车轮动载荷
由图7、图8及图9可以看出,车辆在B级路面50 km/h和120 km/h及E级路面20 km/h这三种行驶工况下,采用模糊控制的空气悬架簧载质量垂直振动加速度明显低于采用PID控制的空气悬架,说明在簧载质量振动加速度的抑制方面模糊控制策略的控制作用比PID控制策略的控制作用明显。
3.2 车轮动载荷
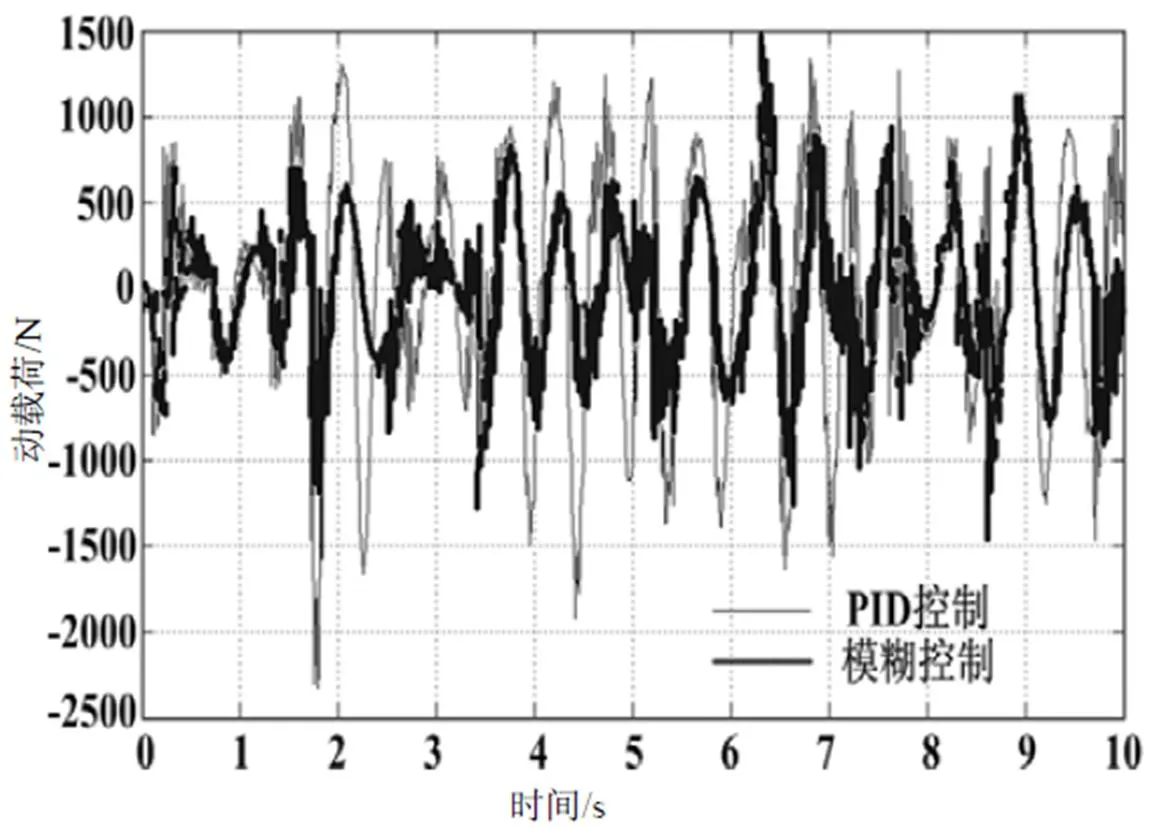
图11 B级路面120 km/h时车轮的动载荷
由图10、图11及图12可以看出,车辆在B级路面50 km/h和120 km/h及E级路面20 km/h这三种行驶工况下,模糊控制策略在对车轮动载荷的控制中起到的效果较PID控制策略好。结合簧载质量垂向振动加速度的仿真结果,可以得知模糊控制策略对于车身垂直振动加速度的减小、乘坐舒适性和行驶平顺性的改善方面有较好的效果;而且在模糊控制策略下由于有效的减小了车轮动载荷,从而在一定程度上提高了行驶安全性和操纵稳定性,所以模糊控制策略对于空气悬架的控制效果较好。
3.3 悬架的动行程的控制
由图13、图14及图15可以看出,车辆在B级路面50 km/h和120 km/h及E级路面20 km/h这三种行驶工况下,模糊控制的空气悬架在悬架的动行程并没有比采用PID控制的空气悬架优越,两者的悬架的动行程相差并不明显。

图13 B级路面50 km/h时悬架的动行程
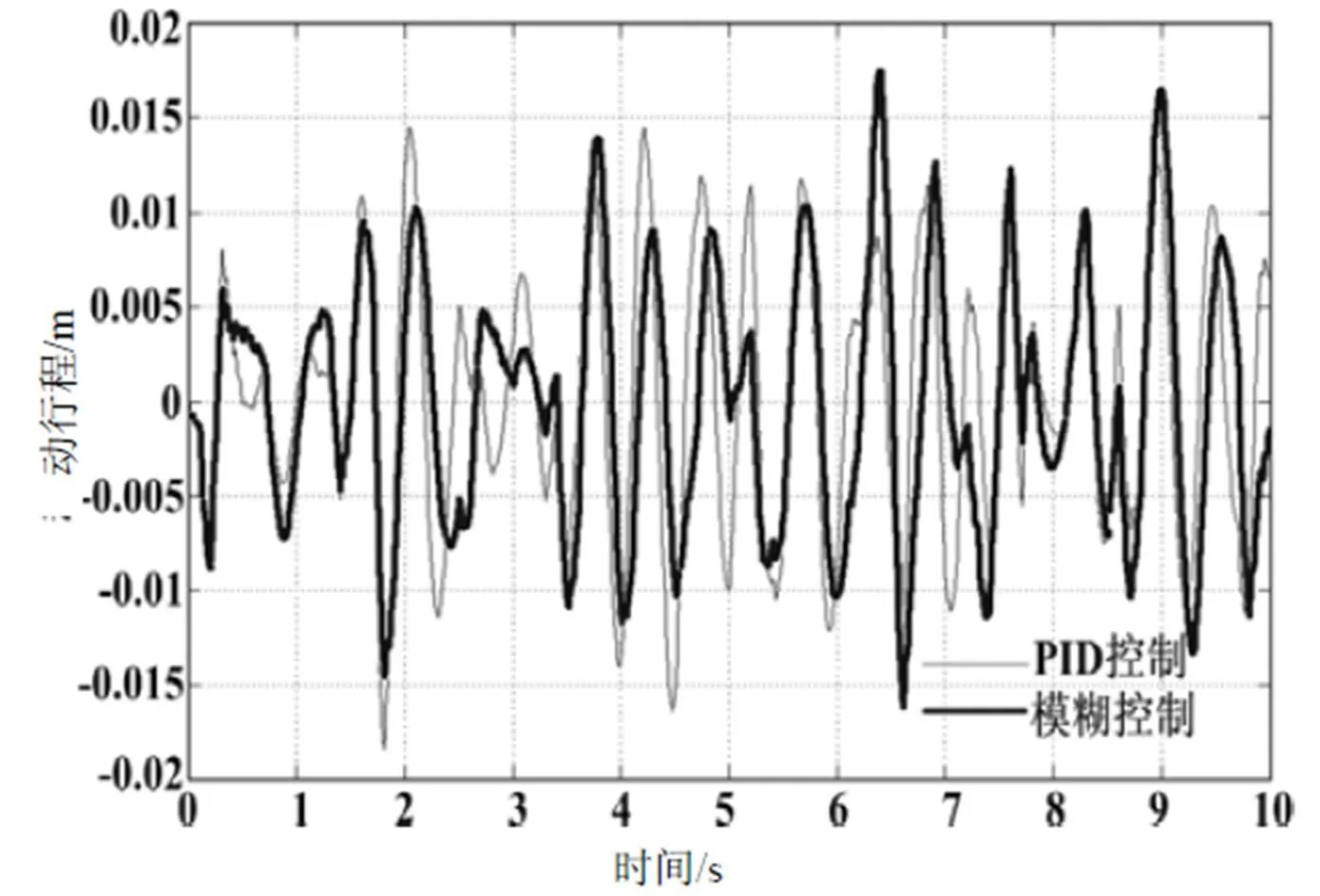
图14 B级路面120 km/h时悬架的动行程
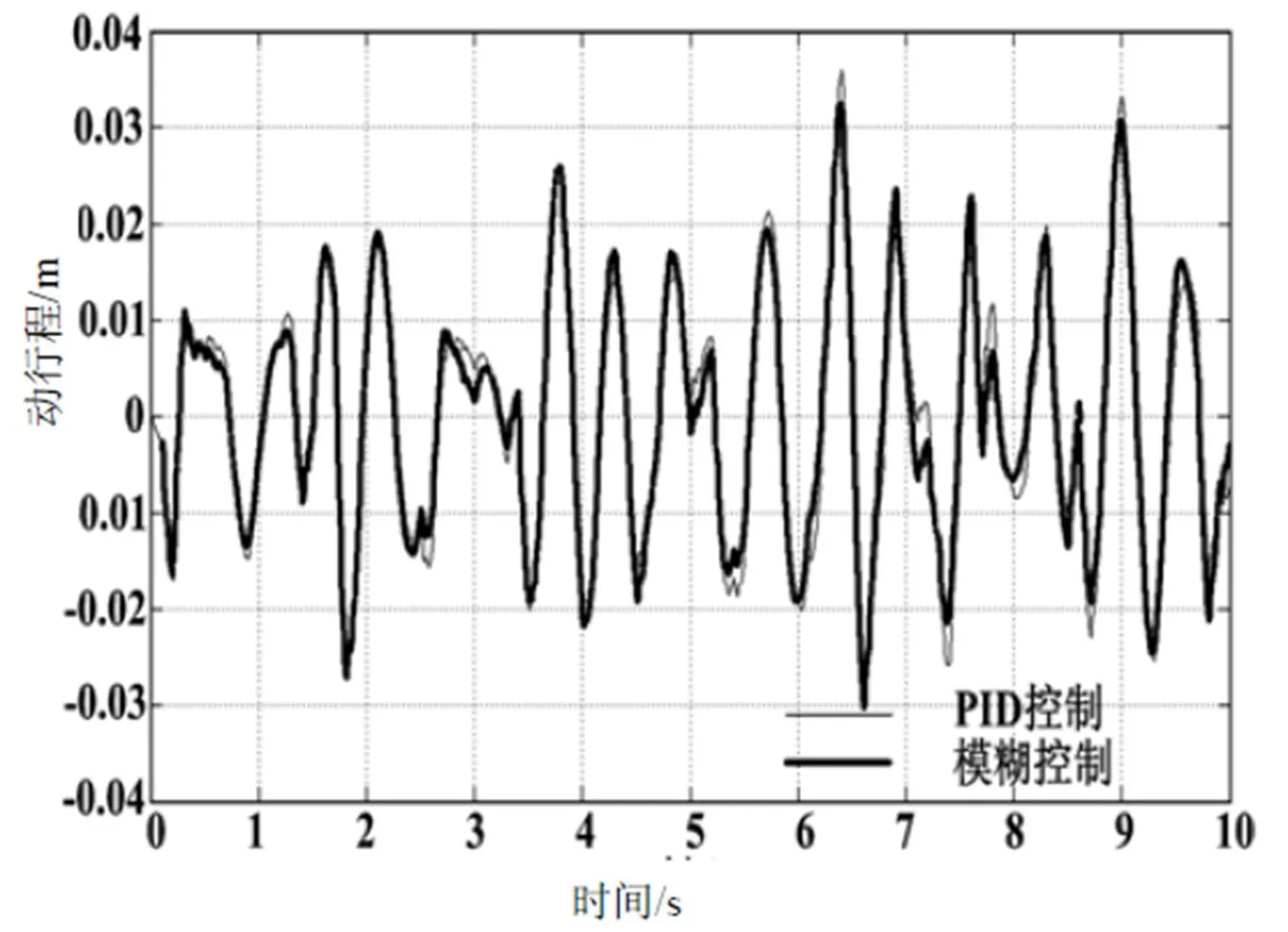
图15 E级路面20 km/h时悬架的动行程
通过以上仿真分析,发现采用模糊控制的空气悬架的性能要明显优于采用PID控制的空气悬架,和PID控制的空气悬架相比模糊控制方式可以更大力度的减小车身加速度的幅值,并使加速度变化相对平缓,同时在车轮动载荷方面控制效果也非常理想。可见采用模糊控制的空气悬架对提高汽车的操纵稳定性的帮助更大,同时也可较大幅度的延长车辆轮胎的使用寿命,并减小车辆对路面的损坏。
4 结束语
综上,本文通过研究后所设计的模糊控制空气悬架对于簧载质量的垂直振动加速度的减小、乘坐舒适性和行驶平顺性的改善方面有明显的效果;而且可以有效地减小车轮动载荷,从而在一定程度上提高了汽车的行驶安全性和操纵稳定性;虽然模糊控制的空气悬架的动行程较PID控制的空气悬架的动行程并没有什么明显的改善,但是在其控制之下悬架的动行程被控制在了一个比较理想的范围内。从文中的仿真结果来看,模糊控制的空气悬架在车辆的操纵性、平顺性和安全性等基本性能的控制上优于PID控制的空气悬架。
[1] 戴清桥,易孟林.汽车半主动控制油气悬架测试研究[J].机械与液压,2003(2):78-83.
[2] 孙为群,柳玉春,陈建武.汽车空气弹簧的理论分析与试验研究[J].汽车科技,1999,2:1-5.
[3] 朱德库.空气弹簧及其控制系统[M].淄博:山东科学技术出版社,1989.
[4] 杨立.计算机控制与仿真技术[M].北京:中国水利水电出版社,2006.
[5] Kashani R, Strelow J E. Fuzzy logic semi-active control of a suspension for off-road vehicle [C].Dallas: Proceeding of ASME Dynamics and Control Division,1997,8:735-741.
[6] Kum-Gil Sung, Young-Min Han, Jae-Wan Cho et al. Vibration control of Vehicle ER suspension system using fuzzy moving sliding mode controller[J].Journal of Sound and Vibration,2008,311(4):1004-1019.
[7] 孙建民.一种汽车主动悬架系统模糊控制器设计及试验[J].振动与冲击,2005,24 (1):13-17.
[8] 刘金棍.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
Study on Control Strategy Simulation of Air Suspension System
*ZHOU Yong,SHI Pei-cheng
(College of Mechanical and Automobile Engineering, Anhui Polytechnic University, Wuhu, Anhui 241000, China)
For the air suspension systems, two simulation models are established which based on fuzzy control and PID control strategy. Through the simulation, we compare the dynamic changes of the sprung mass vibration acceleration, the dynamic wheel load and the suspension travel of the two different control strategies for air suspension. Results show that the fuzzy control of the air suspension is superior to the PID control of the air suspension on the basic properties of controls, such as handling, ride comfort and security. The research results can provide theory reference to the experimental research and product design of the air suspension.
air suspension; fuzzy control; PID control; simulation
U461.1
A
10.3969/j.issn.1674-8085.2012.05.016
1674-8085(2012)06-0070-05
2012-05-12;
2012-09-11
安徽省教育厅自然科学研究项目(KJ2011A036)
*周 永(1987-),男,安徽巢湖人,硕士生,主要从事现代机械设计理论与方法研究(E-mail:zhouyong_06@126.com);
时培成(1976-),男,安徽六安人,副教授,博士,主要从事汽车系统动力学、汽车振动分析与测试技术等研究(E-mail: shipeicheng@ahpu.edu.cn).
