高分辨率SAR图像道路交叉口检测与识别新方法
2012-10-25程江华库锡树孙即祥
程江华 高 贵 库锡树 孙即祥
(国防科技大学电子科学与工程学院 长沙 410073)
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动式微波传感器,具有全天时、全天候、强穿透等工作特点,能够提供地物表面粗糙度、内部结构和介电常数等可见光和红外光传感器难以获取的信息,因此在遥感成像领域得到广泛应用。道路网是重要的基础地理信息,在城市区域高分辨率遥感图像中,近80%的目标是建筑物和道路网。交叉口既是道路网中基本而重要的组成元素,也是稳定且可靠的特征,能提供道路的位置、连接性、方向性等信息,在辅助导航(巡航导弹或无人机)[1]、道路网自动匹配[2]、GIS数据变化检测及自动更新[3]等领域应用广泛。道路交叉口还可作为道路网半自动提取方法(种子点生长、跟踪、Snake模型等)的初始种子点,其正确检测有助于提高道路网提取的质量[4]。
在低分辨率遥感图像[5]和光栅地图[6]中,道路交叉口表现为点目标(2条或2条以上的道路线在某点交叉),传统方法是在道路交叉口检测之前先行提取道路线特征[5-6]。Iisaka等[5]先将SAR图像分割为重叠的局部子图像,然后在子图像用Hough变换提取线特征,最后将线的交叉点确定为道路交叉口。受噪声干扰影响,通常提取出的线存在断裂情况,需要对线进行内插或外插,得到线的交叉点,进而确定为道路交叉口[6]。由于计算线特征本身复杂度较高,且成像向高分辨率发展,因此该类方法适用性不强。
在中高分辨率遥感图像中,道路交叉口表现为区域特性。通常利用道路交叉口区域的灰度、边缘、方向、几何形状等多种特征共同进行检测。归纳起来,大致分为两类:
(1)直接检测法。Barsi等人[7]将图像的均值、方差、边缘等信息用于训练前向神经网络,在滑动窗口中判断是否存在道路交叉口。该方法无需先行提取道路网,但存在虚警率偏高的问题。陈晓飞等人[8]先检测道路候选区域,然后通过提取直线的方法估计道路交叉口的中心、道路的数目及方向,最后从统计和几何形状两个方面共同验证道路交叉口,该方法存在准确率高、鲁棒性强的特点,但本质上还是沿袭先行线特征提取的思路。外部GIS数据等先验知识有助于检测道路交叉口。Mehdi等人[4]首先借助于外部数据的拓扑和几何信息,获取连接到交叉口的道路数量、交叉口的大致位置及道路的宽度等信息,然后提取交叉口的形状,最终得到高分辨率航空图像乡村道路简单交叉口的提取结果。该类方法存在的缺点是需要依赖外部GIS数据。
(2)间接检测法。道路交叉口是道路网提取的附带产物。Negri等人[9]以最大程度保留交叉口信息为准则,使用圆形窗口计算多特征值,在此基础上采用矩形窗口获取道路线段和交叉口,并在马尔科夫方程中约束线段必须经过交叉口,最终迭代得到道路网。该方法阈值设置偏多,且多依赖经验,自动化程度不高。Hu等人[10]使用种子点跟踪的方法获取道路树形结构,交叉口作为树形结构的分叉点,根据Bays准则对树形结构进行裁剪,最终获得道路网。该方法适用于光学遥感图像,且需要手动输入种子点。
经过 20多年的研究,人们尽管提出大量的道路网络提取方法。然而,仅有少数针对于光学遥感图像的道路交叉口检测方法,鲜有开展高分辨率SAR图像道路交叉口检测的文献,与其重要性极不匹配。
本文针对当前现状,考虑到SAR图像与光学遥感图像的差异:道路与附近地物的灰度差异不大,且受不同干扰的影响,同时结合高分辨率SAR图像道路交叉口的灰度及形状等特征,提出一种直接检测识别道路交叉口的新方法。本文结构安排为:第2节详细阐述道路交叉口的类型特征,第 3节给出检测识别方法,第4节实验结果及分析,第5节得出结论。
2 道路交叉口类型及特征
2.1 类型
在道路网规划中,交叉口的设置、形状、规模等都有具体的规定。本文参照文献[4]的分类方法,将其大致归纳为3类:
(1)简单平面交叉口。包含3个及3个以上的道路分叉,没有中间环岛。常见的有“T”、“Y”、“+”、“L”等几何形状。在临近交叉口区域,根据交通安全规则,道路宽度一般固定且有平行双边缘。
(2)复杂平面交叉口。不仅包含3个及3个以上的道路分叉,还有中间环岛。
(3)立体交叉口。道路不在同一个平面上相交形成的立体交叉,主要由立交桥、引道和坡道等组成,可分为分离式和互通式两种。
本文只研究简单平面交叉口检测识别方法。
2.2 特征
在高分辨率SAR图像中,由于道路两旁建筑物等地物的二次回波反射、路面沥青材料吸波、后向散射等共同影响,道路表现为双边缘包围的暗长区域。“T”、“Y”、“+”、“L”等平面交叉口的灰度较一致,具有一定的形状。然而,由于各种噪声干扰的影响,实际情况下高分辨率SAR图像道路交叉口呈现以下特性:
(1)交叉口区域内的车辆、岗哨等干扰会造成其灰度不一致,存在杂散亮点或区域;
(2)交叉口区域附近的红绿灯架、天桥、铁护栏等金属地物具有强雷达回波反射特性,会形成较亮的噪声干扰,破坏交叉口的形状;
(3)道路两旁的建筑物、绿化带、铁护栏等,会造成交叉口附近区域道路的平行双边缘不明显,甚至被打断;
(4)SAR固有乘性相干斑噪声干扰,造成道路交叉口区域与周围地物的对比度不明显。
鉴于繁多的干扰类型及复杂的背景环境,高分辨率 SAR图像道路交叉口检测识别是个艰巨的研究课题。
3 道路交叉口直接检测识别方法
SAR图像背景杂波的统计分布极为复杂,很难用某一概率密度函数具体描述杂波的分布特性,以此进行分类识别。另外,根据第2节分析知,各类噪声干扰物的存在,以及道路交叉口区域与附近地物对比度不明显。这些因素增加了道路交叉口区域的分割和识别难度。
本文借鉴SAR图像自动目标识别的一般流程,根据道路交叉口的灰度及形状特征,提出一种道路交叉口位置检测及形状识别的新方法(图1)。该方法分为两个步骤:全局区域检测和局部形状识别。全局区域检测用于去除明显不是道路交叉口的区域,并得到候选区域的中心点坐标;局部形状识别用于去除遮挡阴影及水体等灰度特征类似于道路交叉口区域的其他干扰区域,最终识别出道路交叉口类型。该方法无需依赖外部GIS数据,无需预先提取道路网线特征。
3.1 全局区域检测
形态学是基于探测的思想,利用结构元素作为探针,获取图像目标的形状结构特征。形态学作为典型的非线性方法,广泛应用于图像预处理、形状分割和识别等诸多领域,在描述物体形态特征上具有独特的优势。
与周围其他地物灰度值相比,道路、交叉口、遮挡产生的阴影、水体等地物要素整体灰度值低,是图像中的暗目标,表现为“波谷”。底帽(Bottom Hat)变换是灰值形态学变换的一种,也叫做波谷检测器,可用来寻找图像的灰度谷值(暗目标),定义为图像闭操作与原始图像之差:

其中,f为原始图像,f⋅b为闭运算,b为结构元素。尽管道路交叉口区域形状类型多样,但交叉口与道路连成一体,连接中心呈现灰度较均匀的类圆形区域特征。因此,选择圆形结构元素,有利于突出这种特征,便于后续提取。结构元素的尺寸选择小于图像中最小道路交叉口区域的内径,但大于一般道路宽度,这样便于模糊掉道路区域。
经过底帽变换后,尚有大量的杂散噪声干扰,采用闭运算不仅可滤除比结构元素小的噪声,且可填充被噪声干扰所破坏的缺口形状。

闭运算后,整个图像呈现较明显的几种类型目标,交叉口区域等地物要素表现为最暗区域,通过计算图像灰度最小值,并与之比较,可得到二值化图像:

其中,设置δ体现实际情况下不同道路交叉口区域灰度均值存在的微小差异。
进一步对二值化图像连通域进行标记,计算面积,并获取中心点坐标,步骤如下:
(1)在二值化图像中任选一未被标记的非零像素,对该像素赋标记值,并按“8-邻域”的顺序搜索附近非零未标记像素,赋同样的标记值,直到搜索完该连通区域未被标记的所有非零像素。转向步骤(2)。
(2)判断其是否搜索完整幅图像。若是,转向步骤(3);若不是,则反转向步骤(1)。
(3)对不同标记值的连通区域计算像素点个数,作为该区域的面积;并计算该区域上下左右 4个边缘角点坐标,这4个边缘角点坐标的中心位置作为该区域的中心点坐标。
3.2 局部形状识别

图1 本文提出的道路交叉口检测识别流程图
经过形态学变换区域检测后,得到候选区域的中心点坐标,并可去除大部分明显与道路交叉口灰度值有差别的区域。但遮挡阴影、水体等与道路交叉口灰度值相接近的区域却无法区分。道路交叉口连接多条道路,呈现出中间为类圆形,四周有多条方向不同的道路与之连接的形状特征,有别于遮挡阴影、水体等其他地物要素。利用这一特征与其他地物要素进行区分,是一个自然的思路。一旦识别出与之连接的道路个数,则可确定道路交叉口的形状并剔除遮挡阴影、水体等其他地物区域。
Hu等人[10]提出了一种独特的光学遥感图像道路方向计算方法。该方法首先以道路中心点为圆心,固定线长旋转一圈,以直线上像素点与圆心点灰度值之差大于所有直线上像素点灰度值的均方根为准则,搜索道路的边缘Ci(图2(a)),形成2维角度距离图(图 2(b));接着以角度为横轴,以道路边缘点到中心点的距离为纵轴,将2维角度距离图转化为1维(图2(c));最后通过计算1维角度距离图中峰值点对应的角度来确定道路大致的方向。从图 2(c)可以看出,存在3个波峰,且有两个波峰对应的角度差近似 180°,则道路交叉口的类型为类“T”型。受此启发,如果计算出道路交叉口区域与之连接的道路主方向,并得到不同主方向道路的个数,则可确定交叉口的类型。
与光学遥感图像不同,由于高分辨率 SAR图像受相干斑噪声及路面各种地物干扰的影响,根据2.2节所述,道路的边缘变得更加模糊,连续的道路区域被干扰物遮挡打断,直接采样文献[10]的方法不能正确得到与交叉口相连的道路方向及类型。如图3(a)所示,实际道路交叉口为“+”型。然而,由于交叉口正上方干扰的存在,正上方道路没有被检测出(图 3(b)),1维角度距离图(图 3(c))中只显示3个明显的波峰。因此,该道路交叉口被误判为“T”型。
为减弱 SAR图像中噪声及干扰对道路交叉口检测的影响,本文提出在应用文献[10]方法之前,先采用非线性扩散滤波[11]滤除道路候选区域内的SAR图像乘性噪声;然后再采用多阈值Otsu分割算法[12]提取出道路区域,减少地物干扰的影响;最后采用矩形模板代替直线,减少分割出不光滑道路边缘的影响,并进行旋转获取道路方向,识别出交叉口形状。

图2 文献[10]道路方向计算示意图
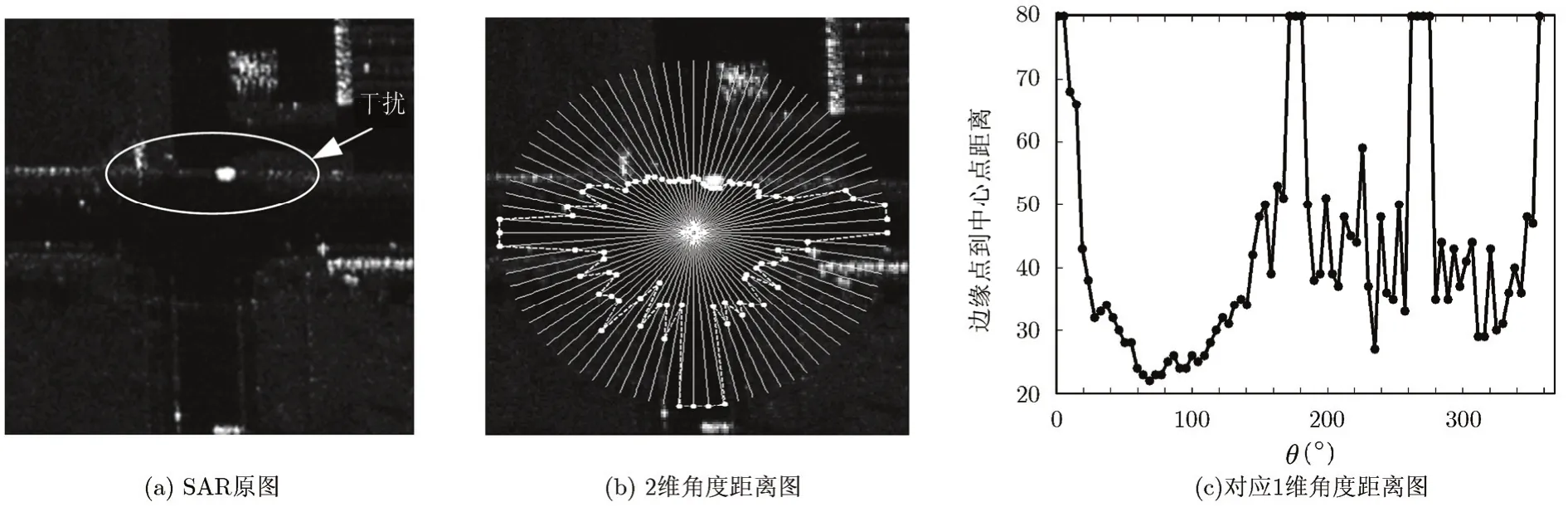
图3 文献[10]道路方向计算方法应用于SAR图像结果
3.2.1 非线性扩散滤波
由于高分辨率SAR图像道路边缘不明显,采用一般的Lee,Frost等乘性滤波器虽然去斑效果较好,但边缘信息保持不够。非线性扩散滤波主要优点在去噪的同时能够保持边缘信息。为了便于说明问题,先给出常用P-M非线性扩散方程模型:

3.2.2 多阈值Otsu分割
在道路交叉口区域图像中,除了存在低灰度值道路外,还存在灰度值与之接近的绿化带等地物,以及高亮度的车辆、铁护栏、红绿灯架、天桥、金属屋顶等地物。采用单阈值 Otsu分割方法易将绿化带等地物误分为道路。安成锦等人[12]通过实验证明:多阈值Otsu较之单阈值递归Otsu,能够更好地提取出SAR图像水域轮廓,且漏警率低。SAR图像水域区域及周边地物的灰度特征类似于道路区域,因此多阈值Otsu同样适合于分割道路区域。
设图像f有L级灰度,存在m个待分类,则需要有m−1个阈值T1,…Tk,…,Tm−1,将图像f分为m类,其类间方差σB为

其中,ωi为第i类的概率,μi为第i类的灰度均值,μ为图像f的均值。
类间方差越大,说明类间的差别性越大,误分的概率越小。类间方差最大值所对应的一组阈值T1,…Tk,…,Tm−1就是所求的最佳分割阈值。
经过多阈值Otsu分割后,得到m类目标。将灰度值最低的道路区域分为一类,赋值为“0”;将其他的m− 1类合并为另一类,赋值为“1”,进行二值化。对尚有部分孤立的小区域,通过计算连通区域的大小,滤除孤立的小区域,并进行形态学孔洞填充。
3.2.3 矩形旋转形状识别
道路交叉口区域经过多阈值 Otsu分割及后续的滤除孤立小区域、孔洞填充后,得到的二值化图像边缘仍不光滑,直接采用 Hu等人[10]提出的直线旋转获取道路方向的方法易造成道路交叉口形状误判。本文提出采用矩形模板代替直线,可克服个别非光滑边缘像素对方向计算的影响;另外,在交叉口附近,出于交通安全考虑,道路一般设计的较直,矩形模板从形状上与道路区域较相似。
定义道路交叉口区域中心点为p,矩形宽度为w,长度为l。矩形模板围绕中心点p,以角度θi=2πi/n进行旋转,n为围绕中心点p旋转的矩形模板个数,则图像中的任意矩形模板可用R(i,p,w,l,n)唯一表示。计算每个矩形模板所包含像素灰度值的均值,形成1维角度均值图m(θi)。
根据1维角度均值图,相对于文献[10]求波峰点的方法,本文按照下列规则求取正确的波谷点:
(1)计算所有波谷点:如果m(θi)=0,或m(θi)<m(θi−1)且m(θi)<m(θi+1),则认为m(θi)为波谷点p(θi);
(3)合并邻近波谷点:设p(θi)和p(θj)为 2 个波谷点,若°,且m(θi)≤m(θj),则可能道路较宽,包含2个以上的矩形区域,选p(θj)为这2个波谷点合并后的波谷点;
(4)去除伪波谷点:设p(θi)为波谷点,p(θj)和p(θk)为 2 个邻近的波峰点,且p(θj)和p(θk)将p(θi)夹在中间。如果,则 2个相邻波峰之间的波谷深度不够,将p(θi)去除。
正确的波谷点对应实际道路的主方向,可得到道路交叉口的类型:
(1)“L”型:存在 2 个峰值点p(θi)和p(θj),且°;
(2)“T”型:存在 3 个峰值点p(θi),p(θj)和p(θk),且存在某 2个峰值点角度差近似 180°,假设;
(3)“Y”型:存在 3 个峰值点p(θi),p(θj)和p(θk),且存在某2个峰值点,假设;
(4)“+”型:存在 4 个峰值点p(θi),p(θj),p(θm)和p(θn),且存在两两峰值点角度差近似180°,假设。
4 实验结果及分析
为测试本文方法的有效性,选择2幅中电集团38所提供分辨率为1 m的机载高分辨率SAR图像切片进行实验。图4和图5为本文全局区域检测过程实验结果。其中,图 4(a)大小为 1224×852,图5(a)大小为677×632,底帽变换结构元素b为15,底帽变换和闭运算后得到候选区域的轮廓线(图4(b),图5(b)),接着二值化(阈值δ为5)。从图4(c)和图 5(c)中可以看出,底帽变换加闭运算能够完全检测出道路交叉口中心点,但由于遮挡阴影、水体等与交叉口灰度值相类似的干扰区域存在,造成过检测情况。图6为本文局部形状识别过程实验结果。其中,图 6(a)为图 4(c)中的区域 1,大小固定为200×200,矩形窗宽度为 8,长度为 80,旋转步进角度6°。
图7为从图4(c)和图5(c)中选择出的5个代表性区域(大小与图 6(a)一样)角度均值图,包含了多种干扰情况。在图4(c)区域1中,正上方道路口区域几乎完全被遮挡住(图 6(b)),由于采用了矩形窗的方法,通过计算矩形内均值,可有效克服遮挡的影响。从图6(d)中可以看出,相对于文献[10]方法只能检测出3个波峰(图3(c)),造成误判为“T”型,本文方法能够有效克服正上方干扰的影响,得到 4个完美的波谷(360°与 0°方向一致),从而正确地判断为“+”型。在图4(c)区域2中,道路与建筑物前停车场粘连,造成道路突然变宽,误以为道路交叉口。本文方法通过剔除小波谷点和波谷不深点,可将其排除开。在图4(c)区域3中,右上方道路上存在与道路方向平行的绿化带干扰,本文矩形窗口内灰度求平均方法能克服此干扰,正确判断出交叉口类型。图5(c)区域4中高大建筑物形成的阴影干扰与图5(c)区域5中水体区域,其大小及灰度值类似于道路交叉口区域,但经矩形窗旋转一周后,搜索不到明显的波谷,因此本文方法可将其排除出。

图4 切片1道路交叉口全局区域检测

图5 切片2道路交叉口全局区域检测
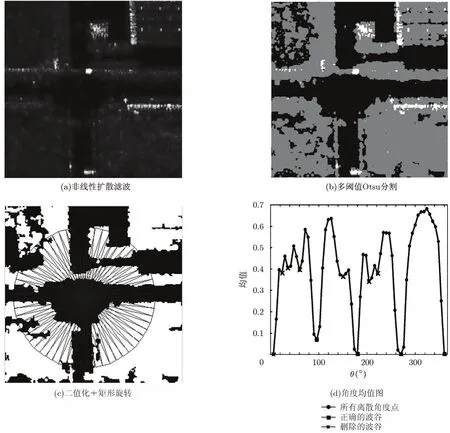
图6 图4(c)区域1道路交叉口局部形状识别

图7 部分代表性区域角度均值图

表1 部分代表性道路交叉口候选区域实验数据统计
表1为图4(c),图5(c)区域1-区域5代表性区域的实验数据统计,从以上分析可以得出,本文方法可有效克服道路上遮挡、道路与建筑物粘连、绿化带干扰、建筑物阴影干扰以及水体干扰等的影响,准确地识别出高分辨率SAR图像道路交叉口的类型。
5 结论
高分辨率SAR图像细节丰富、地物繁多、背景复杂,道路交叉口附近存在各种干扰,且道路与周围地物的对比度不明显。采用先提取线特征,然后搜索线交点为交叉口的传统道路交叉口提取方法很难奏效。本文提出一种道路交叉口直接检测识别的新方法,该方法先全局检测搜索交叉口候选区域中心点,然后再局部识别其类型。实验结果证明,本文方法可有效克服遮挡、粘连、绿化带等干扰的影响,能够去除阴影及水体等灰度值类似于道路交叉口区域的其他干扰区域。该方法无需依赖外部 GIS数据,无需预先提取道路线特征。
