双加热湿度传感器的CFD分析与加热策略设计*
2012-10-21刘清惓杨荣康张加宏
刘清惓,杨 杰* ,杨荣康,张加宏,李 敏,戴 伟
(1.江苏省气象探测与信息处理重点实验室,南京 210044;2.南京信息工程大学,电子与信息工程学院,南京 210044;3.中国气象局气象探测中心,北京 100081;4.南京信息工程大学,计算机与软件学院,南京 210044)
湿度传感器通常分为电容式和电阻式两类。近年来,由于电容式湿度传感器显示了温度系数相对较小、响应速度快、湿度的滞后量小等优点[1],电容式湿度传感器已成为气象领域湿度测量的主流技术。
图1(a)为传统湿敏电容器件结构示意图,在衬底正面制备湿敏电容的两个电极和相应的引线及焊盘。图1(b)为双加热湿度传感器结构示意图,双加热湿度传感器由两个相同的湿度传感器构成,传感器与PCB板之间通过薄型PCB板相连。薄型PCB板不仅具有热阻大、热容小的优点,而且当其距离较小的情况下还能够保证一定的刚度。

图1 湿度传感器结构示意图
常规高空气象观测中,不仅需要湿度传感器具有较高的精度,而且响应速度需达到秒级,因此湿度传感器表面应与空气充分接触。测量时,为便于气流吹过湿度传感器芯片表面,湿度传感器需暴露在探空仪的外部。然而,随着探空高度增加,环境温度降低可能使得湿度传感器表面结霜或结冰,霜或冰覆盖在其表面会导致测量结果偏离准确值。即使表面没有附着霜、冰、雨滴等,当环境温度达到-30℃甚至更低时,水分子在湿敏薄膜中扩散会变得相当困难,从而降低响应速度和测量精度[2]。芬兰Vaisala(维萨拉)公司为了解决上述问题,提出了一种基于双加热湿度传感器的探空测量方法,初步解决了雨滴、霜、冰晶等表面覆盖物烘干问题。如图1(b)所示,这类传感器由两个相同的电容式湿度传感器构成,在芯片上还集成了加热电阻及与之相连的焊盘。其工作原理为两个湿度传感器交替循环工作,湿度传感器A进行烘干时,湿度传感器B在进行测量,当A完成烘干进行测量时,B再进入烘干。双加热湿度传感器是气象传感领域一种前沿技术,国内外鲜有公开发表的论文和专利对其加热特性和加热策略进行研究,金建东等初步研究了具有加热功能的双模块湿度传感器的应用,但是未进一步研究其双加热机理[3]。本文提出利用计算流体动力学(CFD)仿真方法对其加热特性和加热策略进行研究,通过对双加热湿度传感器进行流固耦合传热仿真,即可求解出它的特性参数,从而可以提出合理的加热策略。
为便于数学描述,将双加热湿度传感器的工作周期分为加热段、稳定段、冷却段和测量段,分别用图2中的t1~t4表示。在加热段加热传感器使其温度从T1(环境温度)升高到目标温度T2(高出环境温度50℃)。在稳定段通过芯片中集成的加热电阻将传感器温度维持在T2。在冷却段通过自然对流[4]对传感器进行冷却。最后进入测量段对湿度进行测量。t3段可近似为指数函数的衰减过程。为了用图2简单的表现出工作周期的四个阶段,可以以Y轴方向的变化量为标准确定一个降温门限,只要温度值低于门限就近似认为温度不再变化,因此把冷却过程实际拆分成冷却段和测量段。
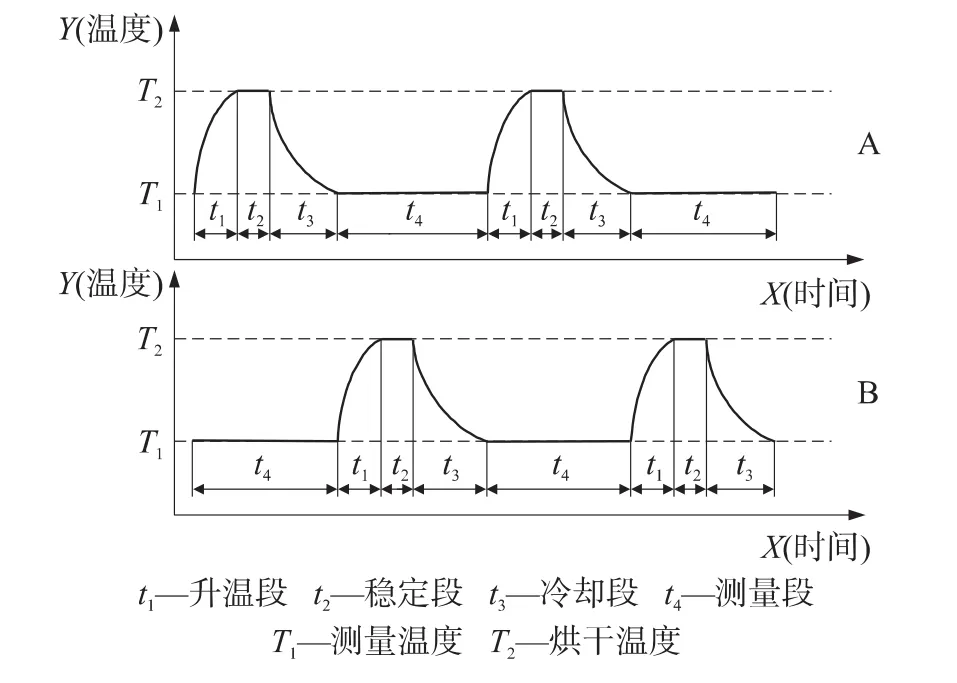
图2 双加热湿度传感器工作时间段示意图
为提高烘干效果,降低芯片表面发生霜附着的概率,则测量周期应尽可能小。由于t2通常不能低于一定的经验值,而t4等于t1~t3之和,所以实现优化设计的关键在于降低t1与t3之和。可以通过加大功率来实现缩短t1,但是加大功率会带来干扰,导致传感器无法得出准确结果,同时也不符合低功耗要求。缩短t1受加热功率限制,降低t3的效果尤为显著。影响加热与冷却的主要因素有空气密度、加热功率、探空仪悬挂姿态角、探空仪水平方向运动轨迹(通常近似为椭球状)等,故要想获得科学合理的解决方案必须针对上述因素进行系统的研究。
针对双加热湿度传感器的具体问题,依据理论建立解析传热模型几乎不可能,有诸多因素导致解析模型难以建立。传感器表面可近似为多个六面体组合结构,不是标准球面,雷诺数大小只能由经验估测,难以用解析方法求解方程得到精确解。如果考虑流固耦合传热,则使得数学模型变得相当复杂。因此,有必要用数值模拟的方法来解决。
由于CFD方法能够根据实际问题建立实体模型,求解费用相对低廉。FLUENT是当前主流的CFD商用程序,不仅已在传感器领域获得较为广泛的应用[5-9],而且也在气象科学中找到用武之地[10-11]。2008年北京奥运会和2011年深圳大学生运会,我国学者利用FLUENT软件对比赛场馆的小尺度气象进行研究,但国内外鲜有将FLUENT用于毫米数量级尺度的气象观测仪器仿真。本文通过FLUENT仿真分析,研究复杂对流热边界条件下双加热湿度传感器的温度场分布,求解出升温时间和冷却时间。通过建立不同湿度传感器间距离模型,模拟出不同间距下湿度传感器之间的温度影响关系。
1 数值模型建立与分析
本文湿度传感器芯片为6 mm×4 mm×0.625 mm的长方体。为了使得两个湿度传感器所测值能够较精确且相互匹配,两个传感器需处在同样的气流环境中且互不影响。两个传感器有多种放置方式,既可以迎着气流方向前后放置,又可以垂直于气流方向并列放置。前后放置时,考虑到上风向湿度传感器的加热热量由于气流作用会影响下风向传感器测量,因此本文采用两个传感器并列的设计方式,并考虑两者之间间距这个影响参数,设计了4个尺寸间距,分别为0.5 mm、1 mm、2 mm、3 mm。
1.1 三维实体建模与网格划分
图3所示为三维建模软件Pro/E建立的双加热湿度传感器模型。较大的空气域尺寸有利于提高计算精度,但会导致计算变得困难且难以求解;反之,可以使得算法容易实现,但计算误差较大。因此需对空气域尺寸进行优化。本文通过比较不同空气域尺寸下模型的仿真情况,从精度和求解的难易程度上考虑,得出忽略PCB板情况下合理的空气域尺寸60 mm×40 mm×100 mm,考虑PCB板情况下合理的空气域尺寸150 mm×200 mm×200 mm。

图3 双加热湿度传感器的三维实体图
从图3(a)可以看出中间的两个长方体是双加热湿度传感器,外围包裹传感器的长方体是空气。图3(b)中双加热湿度传感器与PCB板之间通过薄型PCB板相连。由于携带探空仪上升的探空气球体积大、质量小,假设忽略水平风突变的情况,则探空仪水平移动速度与水平风移动速度相同。若以探空仪为参照物,水平风近似为0 m/s,因此可忽略水平风对传热的影响。长方体空气的下侧面为气流入口,探空仪上升速度根据载荷、高度不同而不同,通常在6 m/s左右,所以气流入口的速度设为6 m/s。上侧面为气流出口,出口面相对于入口面的压力为0 Pa。
为了获得理想的网格划分质量,本文采用目前主流的网格划分软件ICEM CFD中模块(Block)的方法进行网格划分[12],得到的六面体网格不仅可实现高的计算效率,亦可保证解算方程能正常收敛。图4为双加热湿度传感器与空气的网格划分情况,中部的黑色区域为双加热湿度传感器,X、Y、Z三个方向的尺度充斥整个模型的长方体为空气流动区域。从图中可以看出对湿度传感器以及其周围空气进行了较密的网格划分,而对温度变化较慢的区域进行了较疏的网格划分。

图4 双加热湿度传感器的网格划分
1.2 边界条件与计算方法
本文研究的双加热湿度传感器需从地面升至32 km的高空,大气压随着海拔高度的变化约有三个数量级,传感器的对流换热与其有密切关系。根据1976年出版的美国标准大气[13]可知气压——海拔高度的数据关系如图5所示。

图5 大气压力与海拔高度的关系图
因流体流速较低,可假设为不可压缩气体[14],所以求解时基于压力求解器(Pressure Based Solver),并采用非定常流动计算,时间步长为ms数量级。模型中因涉及传热计算,故使用能量方程;湍流粘性采用Laminar模型[15];压力和速度解耦采用SIMPLE算法(Semi Implicit Method for Pressure Linked Equation)[16];动量、能量以及湍流参量的求解先采用一阶迎风模式(First Order Upwind)使其收敛,在此基础上采用二阶迎风模式提高计算结果的精度。固体域加热功率采用源项,给定生热率;计算流体进口采用速度入口条件,给定流体流速、温度及相应的湍流条件;出口采用压力出口边界条件。
根据表1给出的双加热湿度传感器模型的材料特性等参数,设定影响其热环境的温度、风速等计算参数,完成数值模拟计算。

表1 双加热湿度传感器的材料特性(地面)
2 结果分析与讨论
2.1 间距对传热的影响
由于两个湿度传感器间距离过大不仅会导致双加热湿度传感器尺寸变大,而且也会造成支架和封装过大,因此需减小湿度传感器间距离。然而减小间距会使得传感器之间相互影响作用加强,给测量带来较大的误差,因此需对传感器间距离进行优化。
由于空气随海拔高度的增加而变得稀薄,散热将变差,所以在散热最差的32 km高空处对其中一个湿度传感器进行加热时影响另一个测量的概率最大。故本文对32 km高空处传感器温度分布进行模拟。当双加热湿度传感器位于高空32 km处时,0.06 W的加热功率即可将其温度维持在T2,所以将加热功率设置为 0.06 W。通过 FLUENT 对 0.5 mm、1 mm、2 mm、3 mm四个间距下的双加热湿度传感器进行了热数值模拟,得到不同间距下双加热湿度传感器的温度场分布图(温度单位为开尔文)如图6所示。

图6 4个不同间距下温度分布图
从间距为0.5 mm、1 mm、2 mm的温度分布图中可以看出,由于空气对流传热的存在,其中一个湿度传感器进行加热烘干工作时,另一个的温度相对于环境温度有所升高。当测量湿度的传感器温度比环境温度高时,就会使其测得的相对湿度有所降低,存在一定的误差。然而间距达到3 mm时,对一个湿度传感器进行加热时,另一个传感器温度仍保持与环境温度相同,所以其测得的结果相比于间距为0.5 mm、1 mm、2 mm较准确。通过对双加热湿度传感器间的四个不同间距进行FLUENT热数值模拟,可以看出,在探空仪上升速度为6 m/s的条件下,只有当两个湿度传感器间距离不小于3 mm时,两个湿度传感器才不会相互影响。但是考虑到双加热湿度传感器、支架和封装应当尽可能的小,间距取3 mm~5 mm。
2.2 升温时间与冷却时间
不同海拔高度升温时间与冷却时间均不同,两者都制约着双加热湿度传感器能否正常工作。例如加热段加热功率一定时,若升温时间太长,则传感器由于升温过高而引起过热会导致湿敏材料改性,从而无法得出准确结果;反之,传感器温度达不到烘干温度T2,导致不能烘干传感器,测量结果仍不准确。若冷却时间太长,将导致传感器的测量周期变长,在测量的过程中传感器可能又会被污染,测量误差较大;反之,冷却时间太短,传感器温度相比于环境温度仍较高,同样测量误差较大。因此不同海拔高度需对应设置不同的升温时间与冷却时间。
升温时间与加热功率有密切关系,加热功率的加载方式不同将得到不同的升温时间。加热段的加热功率可以采用两种方案,方案一为加载恒定功率;方案二为加载变功率。方案一的特点是不同气压下的升温时间不同。方案二的特点是不同气压下的升温时间可以相同,但是需在湿度传感器表面放置多个测温电阻不断地测量其温度,并反馈给控制电路,控制电路通过获知的温度值来判断所需提供的加热功率,这使得测量系统变得复杂。基于此,本文采用恒定功率加载方案。经FLUENT计算可知,在地面处,0.4 W的加热功率即可将传感器温度从T1升高到目标温度T2,所以加热段最小加热功率0.4 W。理论上,缩短升温时间可以通过增加加热功率来实现,但是因为探空仪使用电池带电,要求设计的传感器满足低功耗要求,所以本设计采用最大加热功率0.6 W。加热功率从0.4 W 至0.6 W,间隔0.05 W。
由图7(a)可知,加热功率为0.6 W时,在地面或近地面低空,升温时间约为5.8 s。升温时间随着海拔高度的增加而减小,在32 km高空,升温时间约为3.8 s。但随着加热功率的减小,升温时间迅速增大。当加热功率降低至0.4 W时,在地面时,升温时间高达 19.5 s;在 32 km 高空时,升温时间约 5.8 s。
从图7(b)可以看出,双加热湿度传感器的冷却时间随着海拔高度的增加呈斜率不断增大的抛物线关系。在传感器温度降幅为40℃条件下,在地面处,冷却时间为9 s。在32 km高空处,冷却时间为63 s。随着温度降幅的增大,冷却时间迅速增大,在温度降幅为48℃的条件下,在地面处,冷却时间为19 s;在32 km高空处,冷却时间则高达123 s。

图7 升温时间、冷却时间与海拔高度关系图
2.3 测量周期
测量周期为4段时间之和,加热段时间取加热功率0.5 W时的升温时间,稳定段时间采用为5 s,冷却段时间取传感器温度降幅为40℃、42℃、44℃、46℃、48℃所需时间,测量段时间为前3段时间之和。图8为温度降幅、海拔高度与测量周期间具体关系图。

图8 测量周期与海拔高度关系图
从图8可以看出,双加热湿度传感器的测量周期随着海拔高度增加呈斜率不断增大的抛物线关系。温度降幅为40℃时,在地面处,测量周期为45 s;在32 km高空处,测量周期为145 s。温度降幅为48℃时,在地面处,测量周期为65 s;在32 km高空处,测量周期高达265 s。
2.4 加热策略
温度降幅的增大会使得测量周期相应的变长,在测量的过程中雪、冰晶、雨滴等污染物可能又会附着在传感器表面,导致测量产生较大误差。温度降幅的减小会使得传感器与环境的温差相应的变大,较大的温差将导致较大的测量误差,因此温度降幅越小,对测量造成的误差就越大。基于此,须根据应用环境与设计需求,合理选择测量周期与测量精度。
短期天气预报一般只考虑低空环境(如0~20 km),然而长期天气预报一般只考虑高空环境(如20 km~32 km)。在高空条件下,温度降幅为48℃的测量周期高达265 s,不符合设计要求;在低空条件下,温度降幅为40℃的测量周期最大为75 s,测量周期符合设计要求,但是其测量精度相对较低。因此本文提出了一种分为低空模式和高空模式的加热策略。在低空采用温度降幅为46℃的测量周期,在高空采用温度降幅为40℃的测量周期。
在低空采用温度降幅为46℃的测量周期,在近地面处,测量周期大约为58 s,在近20 km海拔高度处,测量周期大约为105 s。在高空采用温度降幅为40℃的测量周期,在近20 km海拔高度处,测量周期大约为75 s,在近32 km海拔高度处,测量周期大约为145 s。测量周期符合设计要求,测量精度较高。
3 不同简化模型对比
忽略PCB板的简化模型网格数较少,显著减小了计算量,但是其合理性缺乏验证。考虑PCB板的简化模型符合实际物理模型,但其计算量相对较大。图9是对两种不同简化模型进行仿真得到的升温时间及冷却时间与海拔高度的关系图。

图9 忽略引线及PCB板与考虑引线及PCB板的升温时间及冷却时间
从图9可以看出,忽略PCB板与考虑PCB板的升温时间之差、冷却时间之差均随着海拔高度增加逐渐变大。低空条件下,升温时间相差0.8%,冷却时间相差0.6%;高空条件下,升温时间相差3.6%,冷却时间相差2.8%。由于升温时间之差、冷却时间之差两者均变化较小,则测量周期变化较小,因此忽略PCB板对实际影响不大。为了减小计算量,选择忽略PCB板的简化模型具有一定的合理性。
4 结论
本文通过FLUENT对双加热湿度传感器在不同气压条件下(地面到32 km高空)进行热数值模拟分析,获得了不同气压处传感器测量周期,得到以下结论:
(1)不同气压条件对传感器的升温时间与冷却时间有着明显的影响。根据计算结果表明,升温时间随着海拔高度增加呈斜率为负值且不断增大的抛物线关系,冷却时间随着海拔高度的增加呈斜率为正,且不断增大的抛物线关系。不同海拔高度需设置不同的升温时间与冷却时间。
(2)在探空仪上升速度为6 m/s的条件下,当湿度传感器间的距离不小于3 mm时,对一个湿度传感器进行加热时,对另一个的测量不产生影响。
(3)形成了高空模式和低空模式的加热策略,在该方案下双加热湿度传感器的测量周期达到了数秒级,加热功率最大0.6 W,实现了不间断测量且精度较高的同时也符合低功耗要求。
本文研究的模型相对简单,有部分因素被简化:压焊块(压焊块的传热相对于整个模型的传热较少,因此在模型中忽略了压焊块传热的影响)、引线和PCB板(根据对比研究发现忽略与考虑PCB板和引线的两个简化模型计算结果相差不大,为了减小计算量,在研究中忽略PCB板和引线对传热的影响)等,将在后续研究中逐步细化模型,使之能更好地符合高空探测的真实环境。
[1]张广庆,赵成龙,秦明.MEMS电容式湿度传感器后处理工艺研究[J].传感技术学报,2011,24(9):1253-1255.
[2]车胜利.湿度传感器在自动气象站中的应用[J].气象水文海洋仪器,2005,3(4):16-17.
[3]金建东,郑丽,王震.MEMS技术在集成加热功能的双模块湿度传感器中应用研究[J].计测技术,2010,30(增刊):26-28.
[4]杨世铭,陶文铨.传热学[M].北京:高等教育出版社,2006:197-202.
[5]余柏林,龚汉东,王颖.基于玻璃的流量传感器研究[J].传感技术学报,2010,23(11):1546-1549.
[6]叶佳敏,张涛.浮子流量传感器的仿真研究[J].传感技术学报,2008,21(1):56-60.
[7]Christian Kral,Anton Haumer,Matthias Haigis,et al.Comparison of a CFD Analysis and a Thermal Equivalent Circuit Model of a TEFC Induction Machine with Measurements[J].IEEE Transactions on Energy Conversion,2009,24(2):809-818.
[8]Andrew J Skinner,Martin F Lambert.Evaluation of a Warm-Thermistor Flow Sensor for Use in Automatic Seepage Meters[J].IEEE Sensors Journal,2009,9(9):1058-1067.
[9]Li Dan,Li Ting,Zhang Dacheng.A Monolithic Piezoresistive Pressure-Flow Sensor with Integrated Signal-Conditioning Circuit[J].IEEE Sensors Journal,2009,11(9):2122-2128.
[10]杨易,金新阳,杨立国,等.高层建筑群行人风环境模拟与优化设计研究[J].建筑科学,2011,27(1):4-8.
[11]李磊,张立杰,张宁,等.FLUENT在复杂地形风场精细模拟中的应用研究[J].高原气象,2010,29(3):624-628.
[12]ANSYS ICEM CFD Help Navigator[Z],2006,3.2.1.
[13]NOAA,NASA,USAF,et al.U.S.Standard Atmosphere[M].Washington,D.C.:U.S.Government Printing Office,1976:53-63.
[14]彭小勇,顾炜莉,柳建祥,等.低速气体流动不可压缩性理论解析[J].南华大学学报(自然科学版),2004,18(3):34-36.
[15]王福军.计算流体动力学分析-CFD软件原理与应用[M].北京:清华大学出版社,2004:6-7.
[16]约翰D安德森.计算流体力学基础及其应用[M].北京:机械工业出版社,2010:179-180.
