基于T-S模糊神经网络的汽车故障诊断的研究
2012-10-08柯喻寅
柯喻寅,谢 镔,吴 卿
(杭州电子科技大学计算机应用技术研究所,浙江杭州310018)
0 引言
汽车安全性不仅是一个技术问题,在某种程度上更是一个严重的社会问题。因此现代汽车故障诊断技术迅速发展,已成为科技研究的热点之一,呈现出多样性[1]。特别是电子技术、计算机技术在汽车上的应用,汽车故障诊断从传统的经验诊断方式,发展为以集成化、智能化的诊断设备为手段,以信息技术为依托的现代汽车故障诊断技术[2]。人工智能技术在神经网络的应用与研究取得突破性发展的同时,智能控制、模式识别以及知识推理专家系统等也引入到了汽车行业之中[3]。本文个人手持汽车故障诊断仪项目中对汽车故障的研究,发现监控排放标准只能诊断70% ~80%的故障,有其局限性。针对其局限性,模糊神经网络与故障诊断结合能利用各自的特性判决故障,诊断的范围广,适用性强,能适应各种环境的变化,更具有鲁棒性。本文以汽车防抱死系统故障诊断为例进行说明。
1 模糊神经网络
神经网络具有很强的自学能力和大规模并行处理能力,能生成无需明确表现知识的规则;而模糊逻辑系统能够充分利用学科领域的知识,采用简单运算来实现知识的模糊推理[4]。模糊神经网络兼具两者的优点。既能处理模糊信息完成模糊推理功能,又具有神经网络处理定量数据的能力。
1.1 模糊理论
模糊集合:设U是论域,对于U上的任一元素x,都指定了[0,1]闭区间中的一个数μA∈[0,1]与之对应,μA(x)称为x对A的隶属度,而μA称为隶属函数。在模糊理论中,一个元素是否属于该集合,界限模糊。反映了事件的不确定性,这种不确定性的程度,用一个属于[0,1]的数值表示。隶属函数很好的描述了事物的模糊性,实质上是反映的事物的渐变性。
1.2 神经网络
神经网络是以数学手段来模拟人脑神经元网络的结构与特征的系统,可用于模式识别、智能控制和信息处理等。误差反馈传播学习算法,这种算法对网络中各层权值系数进行修正,适用于多层网络的学习,基本原理是梯度最速下降法。使网络总误差最小。
2 模糊神经网络的应用
2.1 故障诊断系统的组成
本文运用个人手持式故障诊断仪项目中的设备(信号预处理单元),监控排放标准获取汽车电子控制单元的数据。采集的数据在PC上进行MALAB模糊神经网络建模,实现故障诊断功能。测试汽车为SANTANA Vista型号,诊断单元为防抱死系统,根据监控排放标准协议动力系标准,通过信号预处理单元获取汽车电子控制单元数据。
2.2 T-S模糊神经网络
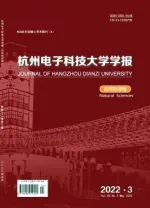
T-S模糊逻辑系统是一种自适应能力很强的模糊系统,能不断修正模糊子集的隶属函数,是一个应用最多的一个模糊逻辑系统[5]。其结合的神经网络基本模型如图1所示。
图1 T-S模糊神经网络基本模型
防抱死系统属于汽车制动性能,检测其是否故障可通过对其调节阀的诊断来确定。首先本文对故障原因和故障模式进行分类,故障原因分5类:y1、y2、y3、y4、y5表示,分别代表无、左前、右前、左后、右后调节阀故障,以 Y=(y1,y2,y3,y4,y5)=(0,2,4,6,8)作为目标函数。故障模式分为 6 类:x1,x2,x3,x4,x5,x6表示,分别代表纵向速度、横向速度以及四轮轮速,作为输入向量。取560个样本,510个样本作为训练使用,50个样本用于故障检测,随机抽取5组为无故障,5组为左前故障。采集的样本数据具体如表1所示。
T-S模型输入层节点与输入向量维数相同,即输入层节点数为6,代表各个速度向量;输出节点数为1,代表故障类型;隐含层节点数为5,形成一个6:5:1的模糊神经网络模型。模糊化层采用隶属函数对输入值进行模糊化处理。采用高斯隶属函数 对输入数据进行模糊化处理。计算出各个样本输入的隶属度。
训练学习能力采用神经网络误差反馈学习算法,进行误差反馈训练。设有动量因子用来修正权值加快学习的收敛速度。权值学习公式为,误差的计算采用通过计算出的误差反馈调节神经网络的参数。
本文通过实验训练1 500次,得出误差下降曲线如图2所示。误差为各样本绝对误差之和,前段下降趋势比较明显说明调节的明显,后段由于不至于产生调节引起的震荡,其调节为细微的处理,下降的比较慢,使整个模型趋于稳定。曲线形状反映了误差反馈调节的特点。


表1 采集的速度数据样本

表2 故障与输出对应表
2.3 故障诊断
通过训练完成的神经网络来进行故障诊断,样本中作为检测的10组数据进行诊断,前5组为无故障,后5 组为左前故障。经过诊断,得到输出值为(0.391,0.402,0.256,-0.313,-0.067,1.928 2,1.936 9,2.148 8,2.040 9,1.897 3)。诊断结果可知前5 组数据 yi≤1 为无故障;后5 组为1 <yi≤3 为左前故障。通过T-S模型模糊神经网络的故障检测,诊断准确率为100%,能够准确地检测防抱死系统故障原因。
3 应用
以个人手持式故障诊断仪项目为基础,本文设计了一个由VS2005编译器上完成的故障诊断界面。故障症状为实时采集的运行中车辆的车速数据,采集间隔为0.1s,采集50组数据进行诊断。本文对一左后故障的汽车进行诊断,结果显示正常。
4 结束语
本文融合了神经网络和模糊理论,采用T-S模糊神经网络模型进行防抱死系统故障诊断。使得从之前的定性故障诊断演变为定量故障诊断,准确性有了极大的提高。将模糊神经网络与汽车电子技术相结合,弥补了仪器诊断常规故障的局限性。将获取的数据采用模糊神经网络进行处理,利用模糊神经网络的特性进行故障诊断,使得故障诊断技术进一步发展。本文模糊神经网络对防抱死系统的故障数据进行故障诊断的正确性明显,但是其他汽车单元的故障诊断还需要进一步的研究。
[1]Liu Guifen.The research on automobile safety control system based on fuzzy neural network[J].Journal of Liaoning Institute of Technology,2008,28(3):153:155.
[2]He Yong,LiZengfang.The research and application of intelligent fault diagnosis methods[J].Journal of Zhejiang University,2003,29(2):119 - 224.
[3]Takagi T,Sugeno.Fuzzy identification of systems and its application to modelling andcontrol[J].IEEE Trans Syst Man and Cybern ,1985 ,15(1):116 -132.
[4]Kher S,Chande P K,Sharma P C.Automobile engine fault diagnosis using neural network[J].Intelligent transportation systems conference proceedings,2001,29(8):492 -495.
[5]Stoeva S.A fuzzy back - propagation algorithm[J].Fuzzy Sets and Systems,2000,112(3):27 -39.