基于无刷直流电机的执行器防堵转系统的设计
2012-09-26张寿春
张寿春
(上海海事大学 信息工程学院,上海 201306)
在工业过程控制系统中,电动执行器能够将将接收的控制信号转换成输出轴的位移从而控制阀门的位置[1]。传统的电动执行器采用交流电机来驱动,随着现代电子技术和电机控制理论的快速发展,无刷直流电机[2]因体积小,控制精度高以及效率高等优点,得到广泛的应用。目前已有采用无刷直流电机来驱动电动执行器,由于这些设备的工作场合往往环境较恶劣,容易产生堵转。由于电动机堵转电流很大,时间过长会烧坏电动执行机构的电动机和控制器。因此防堵转是无刷直流电机驱动的执行器的关键问题。
文中根据无刷直流电机的控制特点,采用ARM核的LPC2132[3]和电流采集硬件保护电路来保护电机及控制器,同时采用软硬件相结合的方法来使执行器在启动和运行等不同的状态下对电流进行精确的控制,从而进行过流保护。结果表明,采用该方法后系统具有良好的防堵转保护性能及动态响应性能,能智能化处理异常状况。
1 系统工作原理
系统采用LPC2132芯片微处理单元来控制电动执行器运行。通过各种参数的设置来控制定阀门的回差、速度和行程等。对于堵转保护电路来说主要有电流采集模块,限流保护模块,驱动保护模块等组成。系统通过直流电源来供电,一路供驱动电路,另一路经过降压给控制系统供电。因为系统耗电主要是电机驱动电流,所以采集电机的相电流作为判断处理的依据。是,将电流信号变换为电压信号,同时提供给驱动电路和微处理器。采集的电流信号与驱动信号相结合共同作为电机的驱动信号,同时微处理器通过获得的电流数据来进行处理。系统原理如图1所示。

图1 系统原理框图Fig.1 Block diagram of system principle
2 硬件电路设计
系统堵转保护电路主要有二部分组成:一是驱动电流采集电路;二是驱动电源保护控制电路。无刷直流电机常用6个场效应管通过换相导通来驱动,可以选择电机驱动芯片如MC33035[4]或分立元件组成的驱动电路。电流采集电路如图2所示,驱动电流在R7上产生一个电压信号VB,通过R5和C1滤波接入比较器LM2903的反相输入端,5 V经过电阻R2和R3的分压接入比较器的同相输入端。当驱动电流超过设定的电流值时,比较器的输出为低电平,PWM的信号变低,改变驱动信号的占空比,从而限制了电机的电流。由于电流采集采用了滤波电路,限制的是电流的平均值。用LPC2132的AD口来采集电压,当超过设定值,关闭PWM信号延时100 μs,否则打开PWM信号。

图2 电流信号采集电路图Fig.2 Circuit Diagram of electric current signal collecting
在图3中,电源+24 V通过场效应管IRF4905管的开通来提供电机的驱动电源,Q2所起的作用是个开关。当B点的电压超过设定的电流极限时,比较器U3输出的是低电平,与门的输出是低电平,Q1截止,场效应管IRF4905不导通,从而切断电机的驱动电压。在电机正常运转中,如果电流没有超过设定值,那么比较器U3输出的是高电平,同时LPC2132的输出PWM信号的占空比减小直至为高电平,Q1保持导通使得电源电压全部加到驱动电路上。采用此部分电路主要是保护供电的开关电源,防止短路电流超过一定的值而导致电源打隔,同时也对电机驱动的尖锋电流进行保护。
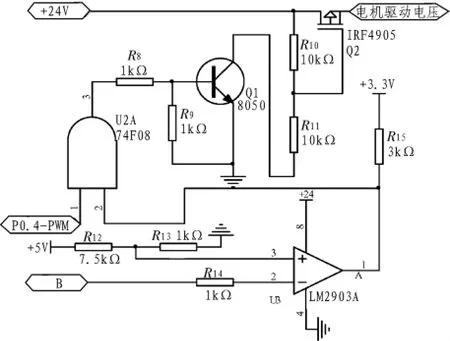
图3 限流保护图Fig.3 Circuit diagram of electric current limited protection
3 软件设计
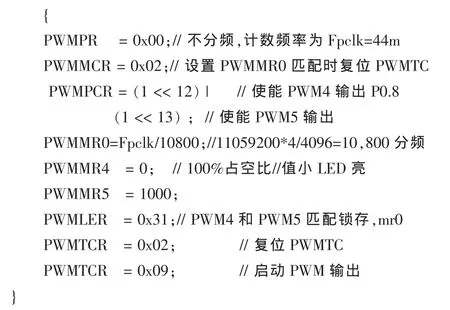
保护系统的主要软件设计主要有:PWM初始化程序,堵转判断程序,电机驱动电流AD采集程序,堵转后的处理程序等。由于系统需要多路PWM信号,所以利用LPC2132的I/O口的PWM资源来输出多个信号[5-6]。

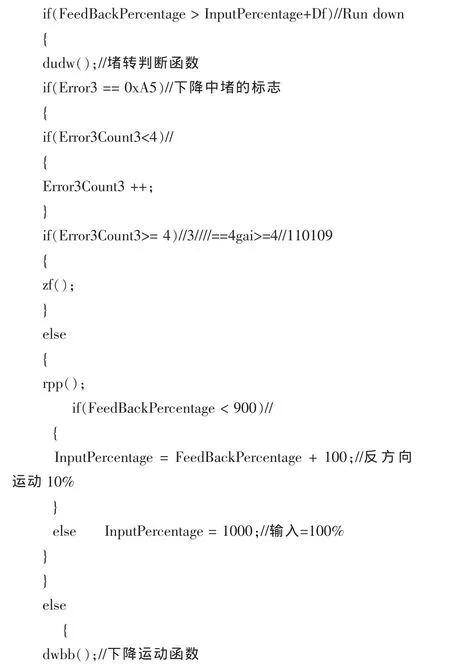
下面的程序主要是堵转的判断与处理,例如,当输入小于输出时,运动之前程序首先进行堵转的标志Error3的判断,如果没有堵,那么执行器将向下运动。如果发生堵转,Error3Count3进行计数,进入堵转处理,反方向运动10%。当堵转计数达4次,执行器本身仍然堵,则停止运动。如果堵转计数没有达4次,而反方向运动10%后堵转消除,则执行器自动恢复正常,同时计数清零。

4 结束语
由于电动执行器工作现场环境差,执行器容易发生堵转。特别是采用无刷直流电机来驱动,电机发生堵转会产生很大的电流,类似与短路,在很短的时间内会烧毁控制器和电机。为了保护电机和控制器,控制器必须有堵转保护电路。利用比较器将电机驱动电流的信号接入驱动电路,同时通过采集电流的值及电流峰值控制电路来控制供电电源,实现了过流保护,在软件上采用智能化处理,提高了系统抗干扰能力,增加了系统本身的可靠性。本文所设计的保护电路在发生堵转后不会出现长时间有大电流通过无刷电机和控制器,从而损坏电动执行机构,现已投入使用,工作可靠,性能稳定。
[1]慈兆会,孔令成,方颖,等.基于TMS320F2812的智能电动执行器控制系统设计[J].测控技术,2010,10(29):55-57.
CI Zhao-hui,KONG Ling-cheng,FANG ying,et al.Control system of intelligent electric actuator based on TMS320F2812[J].Measurement&Control Technology,2010,10(29):55-57.
[2]叶金虎.现代无刷直流永磁电动机的原理与设计[M].北京:科技出版社,2007.
[3]PhilipsSemiconductors.LPC2132 Productdata[EB/OL].[2010-11-07].http://www.alldatasheet.com/datasheet-pdf/pdf/99073/PHILIPS/LPC2132.html.
[4]ON Semiconductors.MC33035[EB/OL].[2011-12-09].http://www.alldatasheet.com/datasheet-pdf/pdf/174254/ONSEMI/MC 33035.html.
[5]周立功,张华.深入浅出ARM7——LPC213x/LPC214x(下册)[M].北京:北京航空航天大学出版社,2005.
[6]周立功,张华.深入浅出ARM7——LPC213x/LPC214x(上册)[M].北京:北京航空航天大学出版社,2005.
