某测试转台电控系统设计
2012-09-26田伟强
田伟强
(中国电子科技集团公司第二十七研究所 河南 郑州 450047)
某测试转台是作为承载小型被试设备而研制的测试平台,使用时固定于高塔塔顶,以便于瞄准远处及空中目标。该测试转台的主要功能是为小型被试设备提供方位、俯仰角度可调的通用的搭载平台,并能够显示转台指向处的方位、俯仰角度信息和电视观瞄场景。该测试转台具有角度定位测量精度高、接口丰富、保护功能全面等特点。
1 系统组成
测试转台系统由显控台和转台两大部分组成。转台置于塔顶,显控台放置在塔上设置的一个操控室内,与塔顶转台之间的距离为30米,与转台之间通过电缆连接。转台由操作人员通过显控台控制。除了转台自身的控制信号之外,作为测试转台,显控台与转台之间还提供了多个信号通路,以方便转台上的被试设备与操控室内的测试仪器之间进行信号连通,以及为被试设备供电。显控台与转台之间的信号连接关系如图1所示。
显控台内安装有时统单元和可调直流电源。时统单元的作用是接收GPS授时信号或靶场提供的IRIG-B(AC)时间码信号,通过解调运算,输出IRIG-B(DC)时间码时统信号,通过电缆连接到转台上的时统信号BNC插座上,为被试设备提供时统信息。可调直流电源为AC/DC开关电源模块,其电压调节范围为2~32v,可提供最大20A的输出电流,通过电缆连接至转台,作用是向被试设备提供直流电源供电。

图1 显控台与转台信号连接示意图Fig.1 Schematic diagram of signal connection between the turntable and the display and control unit
在显控台上和转台上分别设置有2个DB9插座、2个RJ45插座和1个9芯插座。这些插座分别通过电缆一一对应连接,为转台上的被试设备和操控室内的测试仪器之间提供信号通路。转台上还设置了两组各3个交流电源插座,分别通过电缆连接至操控室内的大功率220 V/50 Hz和115 V/400 Hz交流电源上,可为被试设备提供最大功率为5 kW的交流供电。电视观瞄单元输出两路模拟视频信号,一路连接至视频采集卡转换为数字视频信号供显控模块显示在显控台显示屏上,另一路连接至显控台上的视频输出BNC插座上,用以将目标图像直接输出至靶场监视设备。
系统的工作过程为:将被试设备架设在转台工作面并固定好之后,系统加电,通过显控台操作面板控制转台手动搜索目标或直接控制转台转到指定角度,然后转台可自动锁定于该位置,同时可以在显控台显示屏上看到电视观瞄单元采集到的转台指向处的目标图像。被试设备可以在该位置上对准目标进行各项指标测试。
2 伺服控制单元设计
伺服控制单元主要由方位和俯仰伺服电机、方位和俯仰驱动单元、角度测量单元、电限位开关、伺服主控单元等构成。其主要作用是控制转台按指定的方式转动并测量转台当前的位置和其他状态信息。伺服控制单元的组成如图2所示。
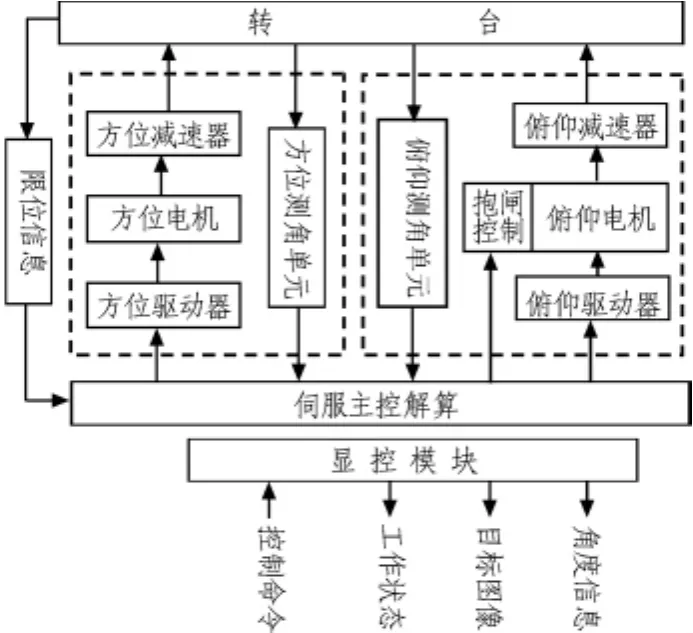
图2 伺服控制单元组成框图Fig.2 Block diagram of the servo control unit
伺服电机采用交流伺服电机,交流伺服电机因体积小、转动惯量小、过载能力强、控制简单等特点在高性能、高精度伺服驱动领域应用广泛[1]。电机与转台方位转轴和俯仰转轴之间安装减速器,驱动单元采用全数字交流伺服驱动器,驱动单元接收主控模块的指令驱动伺服电机转动。伺服主控单元包括位于显控台上的工控机和运行于工控机上的伺服解算软件和显控软件。角度测量单元为两个角度光电编码器,分别安装在转台方位转轴和俯仰转轴上,用于检测转台的方位转动角度和俯仰转动角度,检测到的角度信息反馈到主控单元。主控单元将角度测量单元检测到的转台当前的角位置信息与操作人员所设定的角度信息相比较,计算得出方位和俯仰驱动单元的驱动信号,发送至驱动单元驱动电机转动到指定的角度。
在系统未加电时转台的方位和俯仰转动机构都处于不受控的自由状态,此时架设被试设备时如果俯仰转动机构失控翻转将发生危险,为防止这种情况发生,俯仰电机采用转轴带抱闸机构的伺服电机,这样在系统上电前转台俯仰电机转轴被抱闸机构抱死,俯仰转动机构不会转动,转台工作面锁定于水平位置,保证了安全,也便于架设被试设备。在系统上电转台受控后,需要解除俯仰电机的抱闸机构,因此伺服主控解算模块需要根据情况向俯仰电机发送解除抱闸的信号。 根据要求,转台转动范围为方位-182°~182°,俯仰-15°~45°,为确保安全,除机械限位装置外转台上还设置了多组限位监测开关,转台转动到设定的限位位置时,相应的限位监测开关将被触发,伺服主控模块实时检测限位监测开关的状态,当转台转动到限位位置时停止转动,从而防止转台超出转动范围。
伺服主控解算主要是通过安装在显控台里的工控机完成的。随着硬件技术的发展,使得计算机可以应用在实时性要求很高的系统中,从而使交流伺服控制系统建立在一个开放、经济、可靠的PC平台上成为了现实。本系统即采用“工控机+适配卡”的结构实现了实时控制功能[2]。工控机主板上安装多串口通信卡、视频采集卡和多功能数据采集卡等板卡。伺服主控解算的作用是根据显控模块发送过来的控制命令完成对转台驱动器的控制从而控制转台转动,完成对电视观瞄单元的变焦、聚焦、调光等控制、完成对转台位置信息的采集和完成对目标图像信息的采集。采集到的信息发送到显控模块进行显示。其中,多串口卡可以扩展4个全双工串口,用于完成伺服主控模块与其他多个设备之间的串口通信,所有串口均采用RS422形式,RS422串口采用平衡发送和差动接收,可在受干扰的线路上拾取有效信号[3],能够满足实时性控制要求;视频采集卡用于将电视观瞄单元采集到的目标的模拟视频信号转换为工控机可以读取的数字信号用于显示;多功能数据采集卡具有16路数字量I/O接口和2路模拟量输出接口,用于采集转台的角度限位信息,并向驱动器输出控制信息。工控机对外接口关系如图3所示。

图3 工控机对外接口关系Fig.3 External interfaces relationship of the industrial computer
方位测角单元和俯仰测角单元均采用光电编码器。光电编码器是一种旋转式位置传感器,在伺服系统中广泛应用于角位移或角速率的测量[4]。根据系统误差的要求,光电编码器的分辨率采用16位,其测角精度为:

转台伺服电机的技术指标计算如下。按最大载重120 kg(被试设备最大质量)计算,加上转台自身的转动惯量、俯仰不平衡力矩,还有风力矩及摩擦力矩,系统方位和俯仰最大负载力矩分别为:

系统的总速比分别设计为:方位iA=305,俯仰iE=244。
由此可得转台方位电机和俯仰电机需要的转动力矩分别为[5]:

根据以上计算,转台方位电机采用额定转矩为1 N·m的交流电机,俯仰电机采用额定转矩为2 N·m的伺服电机。
系统采用全数字交流伺服驱动单元作为电机的驱动器。该驱动单元具有结构紧凑、适配能力强、集成度高、功能强大、控制方式灵活等特点,与转台伺服电机一起形成高可靠、高性能的交流伺服驱动系统。
3 系统电源设计
系统中使用了较多的电源,有直流电源、交流电源、信号电源、驱动电源,还有被试设备供电电源。其中直流电源均采用AC/DC开关电源模块,电机驱动电源前端设置EMI滤波器来隔离电机转动时产生的电压扰动。
因系统中使用的电源种类较多,电磁兼容设计就变得非常重要,主要采取了以下措施来解决电磁兼容问题:1)强电与弱电之间采用光电隔离驱动;2)信号电源或弱电电缆采用屏蔽电缆;3)数字地、模拟地等接地信号按信号电平大小分开接地、分组并联;4)显控台机柜采用屏蔽机壳设计[6]。
4 结 论
根据以上设计,研制出了测试转台试验样机一套。经靶场测试证明,转台方位、俯仰转动机构转动角度连续可调,交流伺服系统工作稳定可靠,光电编码器测角精度高,系统电磁兼容性较好。转台主要技术指标如下:负载能力为0~120 kg,角度定位误差:方位 0.15 mrad(r.m.s),俯仰 0.32 mrad(r.m.s)。该测试转台的研制对其它同类设备的设计制造提供了经验和依据。
[1]张锐,白连平.永磁交流伺服电机控制系统的研究[J].电气技术,2011(3):6-7.
ZHANG Rui,BAI Lian-ping.Research on permanent magnet AC servo motor control system [J].Electrical Engineering,2011(3):6-7.
[2]张旭东.基于PC机的开放式交流伺服系统的研究[J].控制工程,2007,14(1):96-97.
ZHANG Xu-dong.Research on open architecture AC servo system based on industrial control computer[J].Control Engineering of China,2007,14(1):96-97.
[3]唐军军,樊锐.RS422串行通信在转台实时控制中的应用[J].装备制造技术,2007(11):43.
TANG Jun-jun,FAN Rui.Application of RS422 in real-time control of turntable[J].Equipment Manufacturing Technology,2007(11):43.
[4]姜义.光电编码器的原理与应用 [J].传感器世界,2010(2):16-18.
JIANG Yi.Principle and application ofphotoelectrical encoders[J].Sensor World,2010(2):16-18.
[5]肖万选,申余才.雷达天线转台负载力矩的确定[J].电子机械工程,2007,23(3):43-46.
XIAO Wan-xuan,SHEN Yu-cai.The determination of Load moment on radar’s antenna pedestal[J].Electro-Mechanical Engineering,2007,23(3):44-46.
[6]杨继深.电磁兼容技术之产品研发与认证[M].北京:电子工业出版社,2007.
[7]封锡凯,李伟,李辉.电磁阀启闭特性非接触测量方法研究[J].火箭推进,2011(3):65-67.
FENG Xi-kai,LI Wei,LI Hui.Study on non-contact measurement techniques of solenoid valve response characteristics[J].Journal of Rocket Propulsion,2011(3):65-67.
