基于恒定开关频率的12区段DTC系统的研究
2012-09-22,,,,
,,,,
(西华大学 电气信息学院,四川 成都 610039)
1 引言
直接转矩控制(DTC)具有算法简单、动态响应迅速、对电机参数不敏感等优点,在交流变频调速领域得到广泛应用。DTC的不足之处主要有2点:1)开关频率变化快;2)转矩脉动很大。为了解决这些问题,国内外学者提出了很多改进方案,对DTC理论的发展做出了很大贡献。文献[1]提出一种基于模糊自适应PI调节器和模糊直接转矩控制器的双模糊控制方法,该方法具有PI调节器的自整定能力,能够减小转矩脉动,但这种方法在硬件的实现上还有一定的困难。文献[2-3]提出一种定子磁链区间细分控制方法,使得开关矢量的选择更为精确,不仅能减小转矩脉动,而且硬件实现也较方便。文献[4-6]使用一种恒定开关频率控制器替代传统的转矩滞环比较器,实验验证这种方法能保持开关频率恒定,还能减小转矩脉动。
本文综合磁链和转矩2方面因素,在传统DTC的基础上提出了一种改进方法,在磁链方面,将6区间圆形磁链细分为12区间,在转矩方面,采用N.R.N Idris提出的恒定开关频率控制器来构成新的磁链和转矩双闭环控制系统。通过仿真实验分析,证实了这种方法不仅能减小转矩脉动,还能保持开关频率不变。
2 12区间DTC控制算法
传统直接转矩控制就是通过对逆变器的电压、电流采样,估算定子磁链和电磁转矩,然后经过滞环比较器将磁链和转矩与给定值进行比较,判断磁链和转矩的增减情况,获得最优开关矢量,最后由电压逆变器将开关矢量转化为电机控制所需要的电压矢量。本文采用2点式磁链控制和3点式转矩控制,得到6区间电压矢量表如表1所示。这种方法通常保持定子磁链逆时针旋转,将定子磁链划分为6个区间,转矩给定值由转速控制器得到。定子磁链区间划分和开关电压矢量图分别如图1a、图1c所示。图1a中将圆形磁链平均分为6个区间,图1c中共有8种不同的开关状态,对应了6个工作电压矢量(U1~U6)和2个零电压矢量(U7,U8)。电机运行时,由各个区间电压矢量状态的不断更替,使磁链按照预定的方向旋转,达到控制电机转矩的目的。

表1 6区间电压矢量表Tab.1 Six-section voltage vectors

图1 磁链区间划分图和开关电压矢量Fig.1 Divided flux section and switching voltage vectors
直接转矩控制中,异步电动机的电磁转矩为

式中:Lσ为漏感;Ψs为定子磁链矢量;Ψr为转子磁链矢量;δ为磁通角(定、转子磁链之间的夹角)。
通常转子磁链由所带负载决定,所以由式(1)可知,电磁转矩的变化主要由定子磁链幅值和磁通角的变化决定。当某一电压矢量确定后,它所引起的定子磁链幅值的变化和磁通角的正弦值变化一致时,才能实现电磁转矩的增、减控制。然而,在通常情况下,两者变化不一致,电磁转矩的变化就由2者之中变化快的一个起主要作用[2]。因此,在某一区间内选择的电压矢量很难同时满足这2个条件,而使电磁转矩按它所期望的那样变化。因此,传统6区间直接转矩控制的开关矢量选择表在某些情况下是不大准确的。另外,所选的电压矢量在它的作用时间内就达到转矩期望值,而在这个周期余下的时间内由于没有发生逆变器开关状态转换,所选择的电压矢量仍作用于电动机,使转矩继续沿原来的方向变化,就会产生转矩偏差[7]。传统DTC的这些缺陷会使定子磁链轨迹不再是一个标准的圆形,同时还会引起电流畸变[8]。
为此,本文提出一种定子磁链12区间的控制方法,12区间划分图如图1b所示。其中将定子磁链按原来的6区间进行细分,将每个区间细分为2个,并重新定义区间序号,共12个区间,每个区间为30°。按照新的区间序号,根据电压矢量对磁链和转矩的作用效果,得到12区间电压矢量表如表2所示。采用12区间控制,电压矢量的选择更为准确,同时每个电压的作用时间更短,比6区间控制更精确[9]。
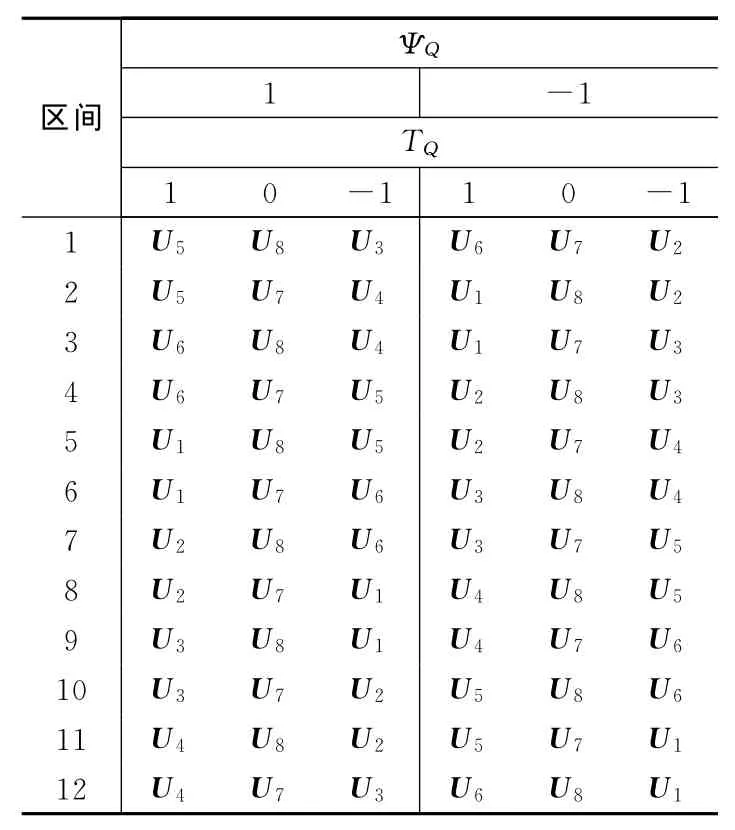
表2 12区间电压矢量表Tab.2 Twelve-section voltage vectors
3 恒定开关频率控制器
转矩控制器的开关频率与电机的运行状态有关,当电机所带负载变化时,功率开关器件的频率也会随之改变,即控制器的开关频率由电机的转速决定[4]。传统转矩控制器,由于采用滞环比较器,开关状态不断切换,还有在实际应用中,电机的转速需要不断改变,造成开关频率不断变化。开关频率变化不仅会产生转矩脉动,还会给硬件的实现造成不便。仿真时发现,减小采样时间和转矩滞环带宽,可以减小转矩脉动。采样时间如果设置得太小,开关频率达不到处理器的要求;滞环比较器的带宽也不能无限减小,有一个极限范围,当小于这个极限范围时,转矩脉动也不会减小,即使带宽设置为零,转矩脉动依然很高。因此,不能依靠调整仿真参数来获得良好的控制性能。本文设计的转矩控制器结构简图如图2所示。
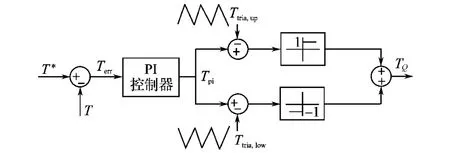
图2 恒定开关频率控制器结构图Fig.2 Structure of the constant switching frequency controller
图2中包括了3个求差模块,1个PI控制器,2个三角波发生器,2个比较器和1个求和模块。估算的转矩与给定转矩比较后,经过PI控制器,得到转矩误差信号,再将转矩误差与三角波进行叠加,进行直流补偿,最后把补偿信号求和,得到所需要的转矩控制信号。直流补偿的绝对值设置为三角波峰-峰值的一半,上下2个三角波的相位相反(互差180°)[5]。这种转矩控制器与传统三电平转矩滞环比较器相似,输出信号都是:1,0,-1,N.R.N Idris将这种转矩控制器称为恒定开关频率控制器。
转矩控制器的输出可由下式得到:
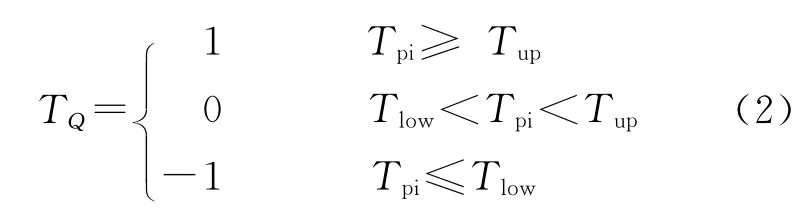
式中:Tup,Tlow分别表示转矩误差状态的上限值和下限值。
控制器的运行可以由一个波形来描述,见图3。

图3 恒定开关频率控制器波形图Fig.3 Waveforms of the constant switching frequency controller
这种控制器的关键是PI控制器参数的选取,采用的方法就是使用控制器线性解析法。这种线性解析法主要基于转矩的线性化模型[6],将转矩的正、负斜率平均线性化之后可以得到转矩斜率的表达式如下:

其中

将式(3)转换到频域范围内有:
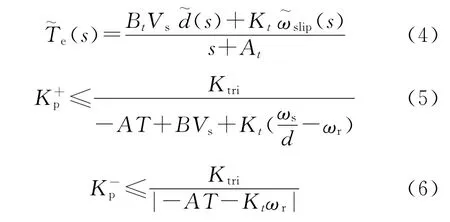
由式(4)可以得到Te与d的传递函数,分子后半部分转差频率相对较小,将其忽略。根据电机的参数计算At和Bt的频域值,最后由式(5)和式(6)2个约束条件得到PI控制器的参数。
4 仿真分析
为了验证算法的可行性,本文在 Matlab/Simulink7.1环境下分别对6区间圆形磁链和恒定开关频率的12区间圆形磁链进行了仿真。仿真电机参数为:额定功率PN=2.238kW,额定电压UN=380V,额定频率fN=50Hz,定子电阻Rs=0.435Ω,转子电阻Rr=0.816Ω,互感Lm=69.31mH,定子、转子电感Ls=Lr=2mH,机械转动惯量J=0.089kg·m2,极对数p=2。
为了比较两种控制方法所产生的效果,两种系统的所有控制参数都设定为相同值,系统给定的磁链幅值0.8Wb,磁链调节器容差0.02Wb,转矩调节器容差0.5N·m,采样时间10μs,仿真时间1s。仿真时,先让电机空载启动达到给定转速100rad/s,电机在0.3s时突加14N·m的负载转矩,在0.5s时开始调速,让电机以120rad/s转速运行,在0.8s时又回到100rad/s。仿真模型中,区间判断,滞环比较器,开关矢量表的选择以及电压逆变器这些部分采用S函数编写,封装在单个的模块中。这种做法不仅避免了使用许多仿真模块,降低了系统的复杂程度,还有一个最大的好处,就是如果我们直接用C语言编写后,函数中程序和算法就可以直接移植到后期的软件开发中去,大大缩短了软件开发周期。仿真结果如图4~图7所示,分别为两种控制系统的磁链轨迹、定子电流、转速响应、转矩响应。
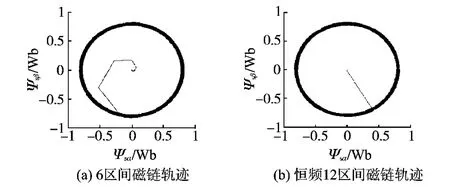
图4 两种控制方法磁链轨迹Fig.4 Flux locus of two control methods
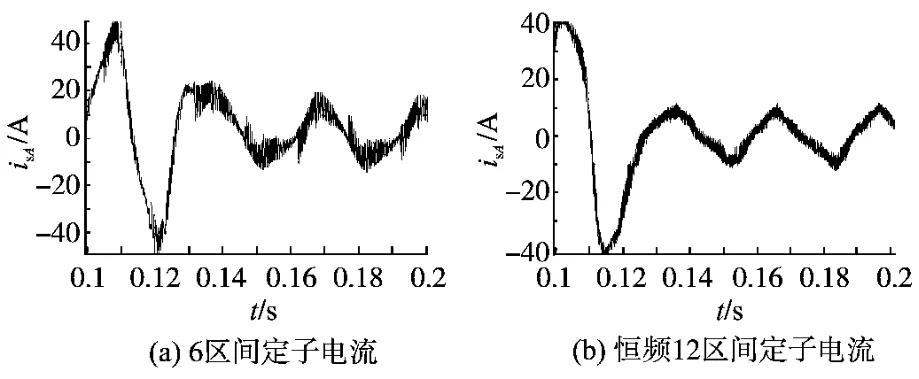
图5 两种控制方法定子电流曲线Fig.5 Stator current of two control methods
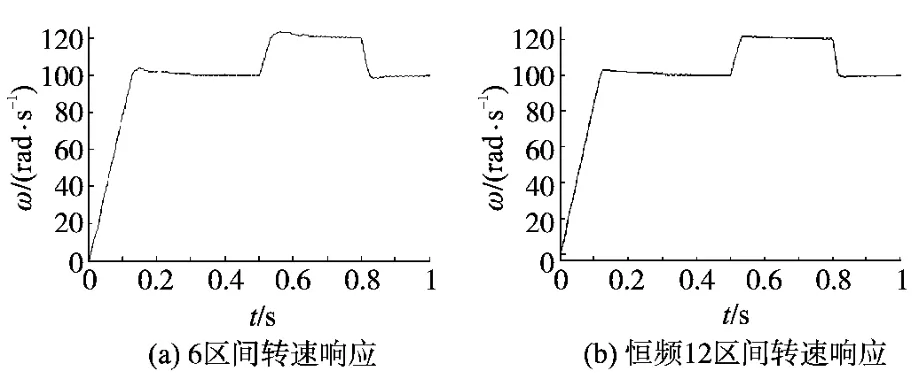
图6 两种控制方法转速响应曲线Fig.6 Speed response of the two control methods

图7 两种控制方法转矩响应曲线Fig.7 Torque response of two control methods
可以看出,在相同的仿真条件下,改进的恒频12区间算法与传统6区间控制方法相比具有更好的磁链控制效果,能减小定子电流畸变,更好地跟踪给定转速,并且显著地减小转矩脉动。仿真时还发现,如果继续减小采样时间,减小转矩滞环带宽,改进的恒频12区间算法还会具有更好的控制效果,而传统6区间控制系统性能改变不大。仿真过程中,系统频率都保持在10kHz,并且还能减小。
5 结论
改进的恒定开关频率12区间控制方法克服了传统6区间开关矢量选择不精确性,对转矩滞环比较器的转矩误差波动也进行了补偿。仿真结果证实了它具有更好的控制性能,为以后对直接转矩控制算法的研究以及硬件的实现打下了基础。
[1]郭忠林,王军.一种双模糊直接转矩控制系统的研究[J].微特电机,2010,20(8):62-64.
[2]黄祯祥,郭延文,廖剑霞,等.直接转矩控制系统磁链区间细分控制的应用[J].电力系统及其自动化学报,2008,20(1):61-65.
[3]廖晓钟,邵立伟.直接转矩控制的12区段控制方法[J].中国电机工程学报,2006,26(6):167-173.
[4]钱坤,谢寿生,高艳梅,等.改进的直接转矩控制在异步电动机中的应用[J].中国电机工程学报,2004,24(7):210-214.
[5]Idris N R N,Yatim A H M.Direct Torque Control of Induction Machines with Constant Switching Frequency and Reduced Torque Ripple[J].IEEE Transactions on Industrial Electronics,2004,51(4):758-767.
[6]Jidin A,Basar M F M,Idris N R N,etal.A Simple Dynamic Overmodulation Strategy for Fast Torque Control in DTC of Induction Machine with Constant Switching Frequency Controller[C]∥PEDS,2009:695-700.
[7]孙笑辉,张曾科,韩曾晋.基于直接转矩控制的感应电动机转矩脉动最小化方法研究[J].中国电机工程学报,2002,22(8):109-112.
[8]郭嘉强,喻寿益.一种改进异步电机直接转矩控制系统性能的方法[J].电气传动,2008,38(9):18-21.
[9]张宇林,蒋鼎国,焦竹青.异步电动机低转矩脉动直接转矩控制研究[J].电气传动,2008,38(9):31-33.
