基于等价补偿ESO的定子电阻扰动估计方法研究
2012-09-22,,,,
,,,,
(南车株洲电力机车研究所有限公司,湖南 株洲 412001)
1 引言
在电机运行过程中,如果对电阻参数进行连续估计和修正,就能提高磁链观测的准确性,从而改善系统的动态性能。当电机的定子电阻发生变化时,定子电流也会随之变化。基于定子电阻和定子电流之间的关系,文献[1]提出采用定子电流误差进行定子电阻估计的方法,由磁链和转矩给定值计算的定子参考电流i*s与测量的定子电流is之间的误差经过PI调节器生成定子电阻变量ΔRs,再从定子电阻参考值R^s(即电机铭牌参数)减去ΔRs就得到定子电阻估计值RsE,最后在基于电压模型的开环磁链观测器中根据RsE计算定子磁链Ψs。这种方法在文献[2-5]中被多次采用,相关文献[6-7]在该方法的基础上提出了改进方案。
本文以定子磁链的频率响应函数(frequency response function,FRF)[8]为依据,根据其幅频和相频特性分析磁链观测对电机参数变化的敏感性,通过推导,指出采用定子电流误差进行定子电阻估计方法设计的磁链观测器,其观测误差受定子电流大小的影响,并提出基于等价补偿ESO(ECESO)的定子电阻扰动估计方法以解决这个问题。根据扩张状态观测器(ESO)[9-10]的特点,借鉴滑模控制设计中的等价控制设计思想,引入不连续投影算子对标准ESO加以修正,提出了采用ECESO进行定子电阻扰动估计的方法,缩小了观测器中汇总不确定性(所谓汇总不确定性是指外部扰动、系统未建模动态和参数摄动作用的汇总)的范围,解决了标准ESO对时变外扰无法保证观测误差有界的问题。
此外,本文还根据ECESO设计了闭环磁链观测器,将定子电流检测信号中由定子电阻变化引起的扰动分离出来,用ECESO进行估计并补偿到磁链观测值中,从而消除定子电阻估计误差的影响。最后分析了ECESO观测误差的收敛性,以及由此构造的磁链观测器对定子电阻的鲁棒性。
2 基于定子电流误差的定子电阻估计方法及其局限性
根据定子电流误差进行定子电阻估计方法构造的闭环定子磁链观测器如图1所示。多数文献是由定子磁链的给定值或观测值和电机模型逐步计算出定子电流参考值,这里不经推导直接给出计算结果,图1中A为

式中:s为拉普拉斯算子;ωbr为转子时间常数τr和转速ωr相关的矢量
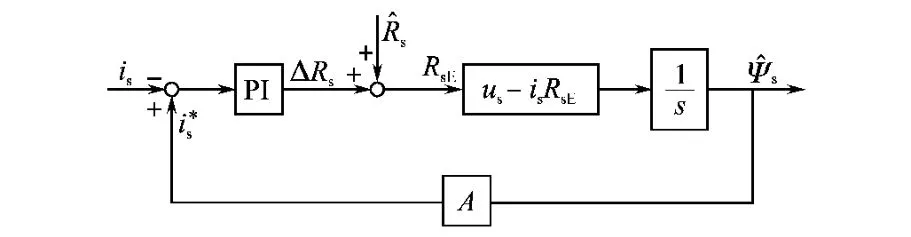
图1 采用定子电流误差进行定子电阻估计的闭环磁链观测器Fig.1 The close-loop flux observer using stator current error for stator resistance estimation
假设PI调节器的增益为K,K=KP+KI/s,那么定子磁链估计值根据以下表达式计算:
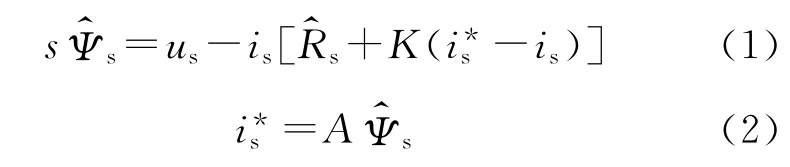
由式(1)、式(2)可得:

定子磁链的实际值为

采用磁链观测值与实际值的比值函数——“频率响应函数(FRF)”[8]评估磁链观测器对电机参数的鲁棒性,则该观测器的FRF函数为

其中

式中:FRFv为电压模型的频率响应函数。
式(5)中除了电机的实际参数和定子电阻参考值,还包含定子电流。因此这种采用定子电流误差进行定子电阻估计的方法,所构造的定子磁链观测器,其观测误差不光与电机参数有关,还受到定子电流变化的影响。
3 基于等价补偿ESO的定子电阻扰动估计方法
辨识定子电阻的根本目的在于消除定子电阻估计误差对磁链观测精度的影响,然而准确辨识定子电阻并不是提高磁链观测性能的唯一途径。借鉴滑模控制设计中的等价控制设计思想,本文提出一种采用等价补偿ESO进行定子电阻扰动补偿的方法,并由此构造了闭环定子磁链观测器,将定子电阻变化引起的扰动作为磁链观测器内部的扰动,采用ESO进行估计并补偿到定子磁链观测值中,同时将观测结果反馈到ESO中参与计算,并且用实测电流替代ESO中部分状态变量,缩小需要估计和补偿的汇总不确定性的范围,进一步提高ESO对定子电阻扰动估计的精度。
根据三相感应电动机在两相静止坐标系下的数学模型[11],转子电压方程可表示为

又由磁链方程可得:
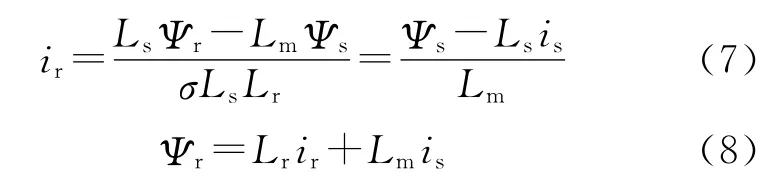
于是式(6)可转化为

对于定子磁链和转子磁链:
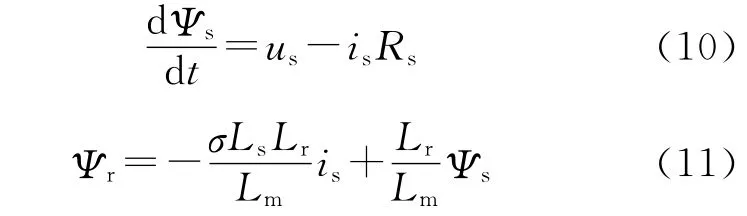
代入到式(9),化简得:
式中:Rs为定子电阻实际值为定子电阻变化量,为电机铭牌参数。则式(12)可改写为
式中:wis为定子电阻变化引起的扰动,wis=-[(ΔRs/(σLs)]is。
ESO为不确定受扰对象的状态及扰动估计提供了一个简单、通用且系统化的观测器解决方案,但其标准形式未利用任何先验或实测信息,因此对于特定系统仍有进一步改进的空间。根据式(13),若采用标准ESO对定子电流is和汇总不确定性进行估计,那么ESO的数学模型为
对比式(13)和式(14),汇总不确定性可表示为

其中,jωris和[ωbr/(σLs)]Ψs中包含转速和滑差,在不同转速和负载情况下变化范围较大,如果采用ESO对汇总不确定性中的所有项进行估计,将直接导致观测性能的劣化。为解决这一问题,在此借鉴滑模控制设计中的等价控制设计思想,利用磁链观测值及实测电流,使需要估计和补偿的汇总不确定性的范围大大缩小。同时为了保证ESO对时变不确定项观测误差的有界性,引入不连续投影算子对标准ESO加以修正。定义不连续投影算子[12]如下:

式中:f为汇总不确定性,fmin<f<fmax;z2为f的估计值。
可以证明,不连续投影Projz2(β2v)具有以下2个重要性质[12]。
性质1:对于任何函数v,若z2对f的初始估计值满足

则此后任意时刻的z2都将处于预先确定的范围内,即有

性质2:若f始终处于预先确定的范围内,即

则有

式中:E为z2对汇总不确定性f的估计误差,E=z2-f。
结合式(13)、式(14),采用不连续投影Projz2(v)进行修正,可构造如下形式的等价补偿ESO:
此时汇总不确定性为

从上述推导过程可以看出,如果采用等价补偿ESO对定子电流进行观测,利用z2对电流检测信号中的扰动wis进行估计,再补偿到定子磁链观测值中,就能消除定子电阻变化的影响。设计如图2所示的闭环定子磁链观测器。图2中等价补偿ESO的数学模型如式(17)所示,定子磁链观测值根据下式计算:


图2 采用等价补偿ESO进行定子电阻扰动估计的闭环磁链观测器Fig.2 The close-loop flux observer using ECESO for stator resistance estimation
4 采用ECESO的磁链观测器对定子电阻的鲁棒性分析
ESO工作在线性区并且fmin<z2<fmax时,如果令

那么根据式(17)ESO的状态变量可表示为
则式(19)中定子磁链观测值可改写为

由电压模型计算的定子磁链观测值为

定子磁链的实际值为

而
那么式(22)可转化为

ESO工作在线性区时根据FRFESO分析图2中磁链观测器对定子电阻的鲁棒性。当Rs=Rs和Rs=1.5Rs时,在ωsl为额定值(ωsl=17rad/s)和ωsl=0(空载)情况下,绘制FRFESO的幅频和相频特性曲线分别如图3和图4所示。
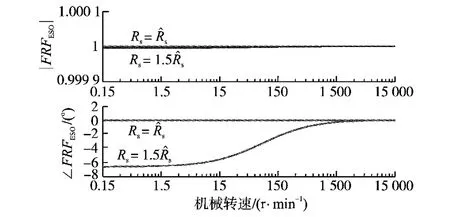
图3 ωsl为额定值时FRFESO的幅频特性和相频特性Fig.3 The amplitude-frequency and phase-frequency characteristics of FRFESOwhenωslis equal to its rated value
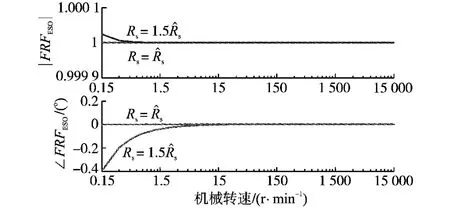
图4 ωsl=0时FRFESO的幅频特性和相频特性Fig.4 The amplitude-frequency and phase-frequency characteristics of FRFESOwhenωsl=0
图3和图4中横坐标为电机机械转速,转速额定值为1 500r/min。当Rs=时,|FRFESO|=1表明定子磁链观测值与实际值Ψs的幅值相等,∠FRFESO=0°表明与Ψs的相位完全重合。从图3、图4中可以看出,该观测器在全速度范围内对定子电阻估计误差的敏感性比较低。ωsl为额定值时,的幅值基本与Ψs相同,最大相位偏差仅为-0.000 7°左右,并且随着转速的增加,的相位误差越来越小。而ωsl=0时的幅值和相位误差略有增加,但是仍然控制在很小的范围以内的幅值最大为Ψs的1.000 03倍左右。在接近零速的条件下(n<15r/min)的相位滞后于Ψs,相位偏差控制在-0.4°以内。
根据上述分析可知,稳态时基于等价补偿ESO的定子磁链观测器能准确估计定子电阻变化引起的扰动并补偿到磁链观测值中,从而消除定子电阻估计误差对磁链观测的影响。
5 仿真结果
在Matlab/Simulink仿真环境下建立图5所示的空间矢量直接转矩控制(DTC-SVM)系统,采用5.5kW的感应电机分别对采用定子电流误差进行定子电阻估计的闭环磁链观测器(以下简称“观测器A”)和采用等价补偿ESO的磁链观测器(以下简称“观测器B”)进行仿真。仿真时所用的电机参数如下:额定功率5.5kW,额定电压220V,额定转速150rad/s,额定转矩35N·m,定子电阻0.813 Ω,转子电阻0.531Ω,定子电感0.106 26H,转子电感0.108 75H,主电感0.102 4H,转动惯量0.02 kg·m2,极对数2。
观测器中定子电阻=0.813Ω,而电机的实际电阻Rs=1.5=1.219 5Ω,仿真结果如图6~图9所示。图6为电机以n*=5r/min的机械转速运行时,采用定子电流误差进行定子电阻估计的闭环磁链观测器在空载条件下定子磁链α分量与观测误差曲线,其中esα=-Ψsα。图7为相同转速下电机带TL=10N·m负载时,定子磁链α分量与观测误差曲线。可以看出,在空载条件下,的观测误差esα在±0.02Wb范围以内。TL=10N·m时esα比空载时有所增加,表明该观测器的观测误差受到定子电流变化的影响,与前面分析结果一致。
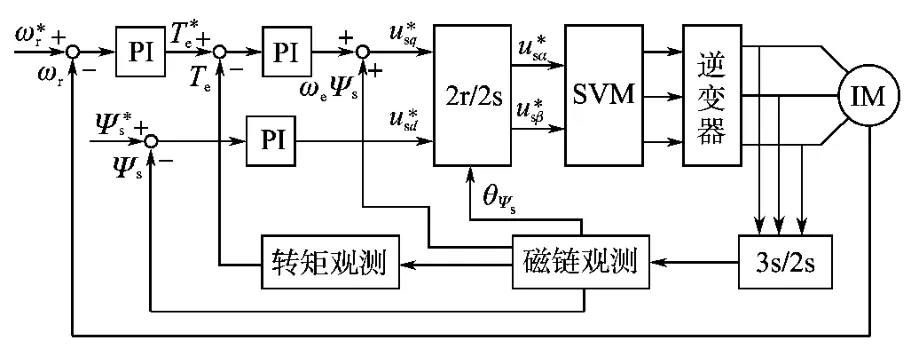
图5 空间矢量直接转矩控制系统结构图Fig.5 The structure diagram of DTC-SVM system
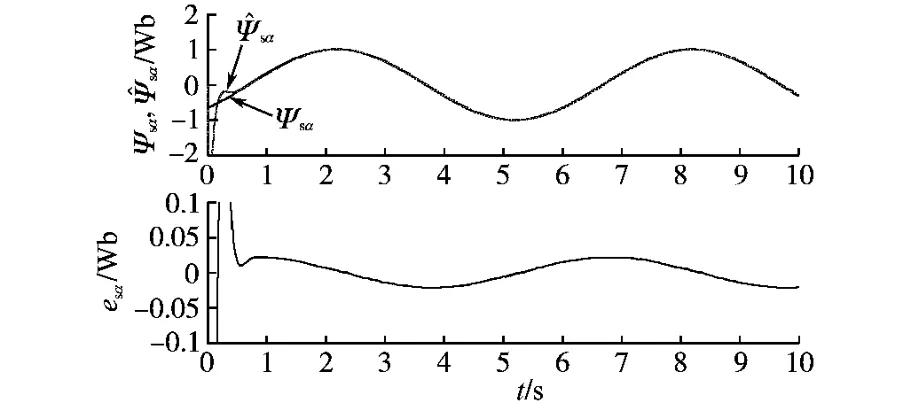
图6 观测器A的定子磁链α分量与观测误差esα(n*=5r/min,TL=0N·m)Fig.6 The stator fluxαcomponent and obser-vation error esαof observer A (n*=5r/min,TL=0N·m)
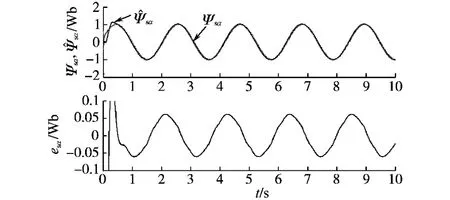
图7 观测器A的定子磁链α分量与观测误差esα(n*=5r/min,TL=10N·m)Fig.7 The stator fluxαcomponent and observation error esαof observer A (n*=5r/min,TL=10N·m)
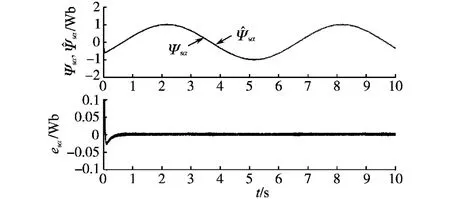
图8 观测器B的定子磁链α分量与观测误差esα(n*=5r/min,TL=0N·m)Fig.8 The stator fluxαcomponent and observation error esαof observer B(n*=5r/min,TL=0N·m)
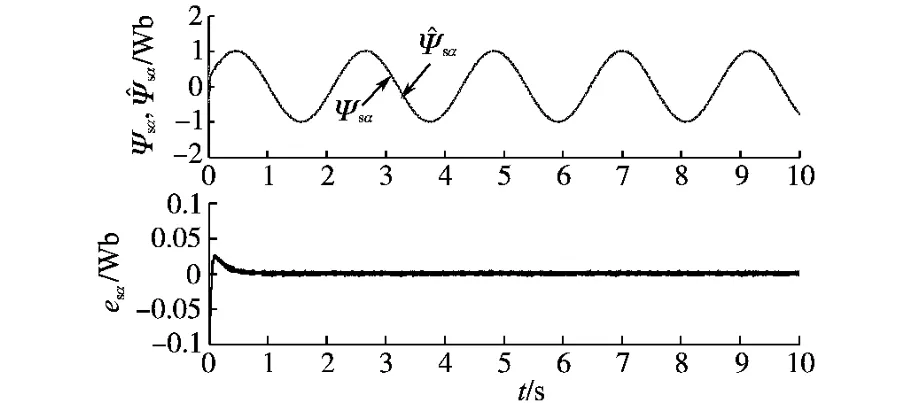
图9 观测器B的定子磁链α分量与观测误差esα(n*=5r/min,TL=10N·m)Fig.9 The stator fluxαcomponent and observation error esαof observer B(n*=5r/min,TL=10N·m)
图8和图9分别为电机以n*=5r/min的机械转速运行时,在空载和带TL=10N·m负载条件下,采用等价补偿ESO的磁链观测器定子磁链α分量与观测误差曲线。从图8、图9中可以看出,稳态时和Ψsα完全重合,观测误差esα几乎为零,与图3和图4的分析结果一致,充分验证了采用等价补偿ESO的磁链观测器对定子电阻的鲁棒性。
6 实验结果
为了验证等价补偿ESO定子磁链观测器在低速段对电阻参数的鲁棒性,本文对该观测器进行了参数敏感性实验。实验时电机空载运行,转速为n*=5r/min。由于无法获得电机运行时的实际参数,因此将电机的铭牌参数作为电机的实际参数,观测器中的电阻参数分别取为铭牌参数的2/3和1.5倍,即R实际=1.5R观测器和R实际=2/3R观测器分别对定子磁链进行观测,观测结果如图10和图11所示。

图10 R实际=1.5R观测器时定子磁链观测结果Fig.10 The stator flux observation results for R实际=1.5 R观测器
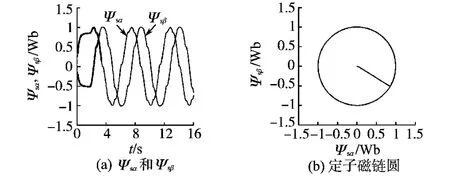
图11 R实际=2/3R观测器时定子磁链观测结果Fig.11 The stator flux observation results for R实际=2/3R观测器
从图10、图11中可以看出电机空载低速运行时,定子电阻对等价补偿ESO定子磁链观测器的观测结果几乎没有影响,说明该方法能有效补偿定子电阻变化引起的扰动,提高低速时磁链观测精度。
7 结论
根据ESO能估计系统扰动的特点,同时借鉴滑模控制设计中的等价控制设计思想,并引入不连续投影算子对标准ESO加以修正,本文提出了采用等价补偿ESO进行定子电阻扰动估计的方法,解决了定子磁链观测精度受定子电阻变化影响的问题。利用Lyapunov稳定性理论对等价补偿ESO观测误差的收敛性进行了研究,最后根据观测器的频率响应函数分析了对定子电阻估计误差的敏感性,结果表明这种观测器在全速度范围内对定子电阻都具有较强的鲁棒性。
[1]Mir S,Elbuluk M E,Zinger D S.PI and Fuzzy Estimators for Tuning the Stator Resistance in Direct Torque Control of Induction Machines[J].IEEE Transactions on Power Electronics,1998,13(2):279-287.
[2]Lee B S,Krishnan R.Adaptive Stator Resistance Compensator for High Performance Direct Torque Controlled Induction Motor Drives[C]∥In:The 1998IEEE Industry Applications Conference.Thirty-third IAS Annual Meeting,1998:423-430.
[3]Muhammed F R,Haque M E,Tang L X,etal.Problems Associated with the Direct Torque Control of an Interior Permanent Magnet Synchronous Motor Drive and Their Remedies[J].IEEE Transactions on Industrial Electronics,2004,51(4):799-809.
[4]Tang L X,Rahman M F.A Direct Torque Controlled Interior Permanent Magnet Synchronous Machine Drive with a New Stator Resistance Estimator[C]∥In:38th IAS Annual Meeting,2003:632-639.
[5]Tang L X,Rahman M F.A New Stator Resistance Tracker for a Direct Torque Controlled Interior Permanent Magnet Synchronous Machine Drive[C]∥In:The 4th International Power Electronics and Motion Control Conference,2004:1454-1459
[6]Haque M E,Rahman M F.Influence of Stator Resistance Variation on Direct Torque Controlled Interior Permanent Magnet Synchronous Motor Drive Performance and Its Compensation[C]∥In:36th IAS Annual Meeting,2001:2563-2569.
[7]Xu Y P,Zhong Y R,Li J.Fuzzy Stator Resistance Estimator for a Direct Torque Controlled Interior Permanent Magnet Synchronous Motor[C]∥In:Proceedings of the Eighth International Conference on Electrical Machines and Systems,2005:438-441.
[8]Jansen P L,Lorenz R D.A Physically Insightful Approach to the Design and Accuracy Assessment of Flux Observers for Field Oriented Induction Machine Drives[J].IEEE Trans.on Industry Aplications,1994,30(1):101-110.
[9]Han J Q.From PID to Active Disturbance Rejection Control[J].IEEE Transactions on Industrial Electronics,2009,56(3):900-906.
[10]Feng G,Liu Y F,Huang L P.A New Robust Algorithm to Improve the Dynamic Performance on the Speed Control of Induction Motor Drive[J].IEEE Transactions on Power Electronics,2004,19(6):1614-1627.
[11]李永东.交流电机数字控制系统[M].北京:机械工业出版社,2003.
[12]Loannou P,Fidan B.Adaptive Control Tutorial[M].Philadelphia:Society for Industrial and Applied Mathematics,2006.
