基于盲分离的柴油机轴系扭振信号分离研究
2012-09-22胡以怀
常 勇,胡以怀
(上海海事大学 商船学院,上海 201306)
1 引 言
柴油机是一个集摩擦学、热力学、动力学以及机械学为一体的复杂的机械系统,柴油机故障诊断技术是目前研究的热点。对柴油机信号进行分析处理,可及时发现柴油机运行状态,柴油机运行故障的诊断能减少船舶运行成木,便于及时发现故障,防止突发性事故发生,提高船舶航行的安全性、可靠性及经济性。
瞬时转速信号干扰成分的频谱组成非常复杂,主要分为随机噪声谱,如齿形误差和机体振动形成的信号噪声;独立线谱,是由多种原因造成,轮盘偏心以一转为一个周期,会产生1/3倍基频及其高倍频成分。此外,曲轴柔性扭转也有其固有频率,会产生相应频率及其倍频成分干扰[1]。
瞬时转速本身的频谱被淹没在这些噪声谱中,它们的频率相互交错,非常接近,使得瞬时转速信号提纯降噪的难度很大。如采用滤波、齿平均等方法对其进行处理,精度太低;通过一些先进的信号处理手段如小波分析进行后期处理,但计算量大、可靠性也很难保证。由逆傅利叶变换进行内燃机瞬时转速信号提纯,可以精确保留所需频率成分。而对于相重合的部分则无法完全去除,这是该方法的最大不足之处[1]。
在故障特别是复合故障形成和产生时,来自不同激励源信号的频率成分往往相互重叠。频率幅值变化是多个激励源共同产生的结果,信号幅值的异常突变也有可能是所忽视的激励源信号产生的。如何准确辨识则可以采取盲分离进行处理。
盲分离算法是指在不知道源信号和传输通道的参数的情况下,根据输入源信号的统计特性,仅通过对多个传感器测得的源信号的混合信号进行分离,最终得到所需的源信号。
2 盲分离原理
盲分离指从若干观测到的多个信号的混合信号中恢复出无法观测到的原始信号的方法,其中每个传感器接收到多个原始信号的一组混合。如图1和图2所示。n个源信号发出的信号被m个传感器接收后得到输出信号。
假设信号传输是瞬时的,即不同信号到达传感器的时间差别可以忽略不计,并且传感器接收到的是源信号的线性混合,即认为各个传感器的输出为

图1 盲信号混合与分离方框图Fig.1 The block diagram of blind signal mix and separation

式中:aij为混合系数;ni(t)为第i个传感器的观测噪声。
用矢量和矩阵表示为

式中:s(t)=[s1(t),s2(t),…,sn(t)]T为源信号的列矢量;x(t)为m×1的混合信号矢量;n(t)为m×1的噪声矢量。
假如不考虑观测噪声,即不存在噪声或噪声在信号盲分离之前已经通过滤波或其他方法降低到可以忽略的程度,则(2)式可以写成

信号盲分离就是指在源信号波形未知,并且混合系数也未知的情况下,仅仅根据传感器所接收到的混合信号x(t)对源信号s(t)或混合矩阵A进行估计。也可以表示为:在混合矩阵A和源信号的矢量s(t)均未知的情况下,求一个r×m的矩阵W,使得W对混合信号矢量x(t)的线性变换为

图2 盲信号混合与分离详细模型Fig.2 The detail model of blind signal mix and separation

通常将矩阵W称为分离矩阵。由公式(3)和公式(4)可得

式中:WA为混合—分离复合矩阵。
源信号来自于不同的信号源,所以一个合理的假设是认为源信号之间是统计独立的。即

式中:f(s)为源信号矢量;s(t)为联合概率密度函数;f1(s1)为源信号的边际概率密度函数。
同时满足,A存在逆矩阵A-1,并在忽略噪声的情况下,则有

因此,为了使盲信号分离可解,则必须满足以下条件[2]:
(1)混合矩阵 A∈Rm×n为列满秩的矩阵;
(2)源信号矢量s(t)是零均值的平稳随机矢量过程,各个分量之间相互统计独立,并且其分量中服从高斯分布的分量不超过一个;
(3)噪声矢量为零均值的随机矢量,并且与源信号相互统计独立,或噪声可以忽略不计,或可以通过其他方式滤掉。
绝大多数盲信号分离算法中,都是假设信号源的各个分量是均值为零的随机变量,因此为了使实际的信号符合盲分离数学模型,在分离之前预先去除信号的均值。设x为均值不为零的随机变量,则零均值信号为

白化实际上就是去除信号各个分量之间的相关性,即白化后的信号分量之间二阶统计独立,T为白化矩阵。
结合混合模型x=As,则

通过一定的线性变化,使得变化后的随机矢量x~的相关矩阵满足

设U=TA,对于任意的正交矩阵U都有

其实现方法主要通过混合信号相关矩阵的特征值分解,设混合信号矢量x的相关矩阵为Rx,则Rx存在特征值分解为

其中:矩阵Σ2为对角矩阵,其对角元素为矩阵Rx的特征值。Q为正交矩阵,其列向量为Rx的特征值对应的标准正交的特征矢量。
于是白化矩阵变为

可以求出

可以看出混合信号的各个分量之间变得不相关。
3 基于卷积盲分离算法
频域盲反卷积建立在离散傅里叶变换和逆傅里叶变换基础之上,时域信号的卷积等于其频域相乘。即

首先对数据进行傅里叶变换形成频域的观测数据,对频域的观测数据进行盲源算法分离,经过分离后的信号进行处理后,使其幅值和相位还原后,保证相位不丢失,进行逆傅里叶变化,得到所需要的分离数据。其主要函数为

从信号源的时延方面进行分离研究。当考虑时延时,其混合信号可表示为

其中Dij为时延矩阵。
因此,恢复的源信号出现幅值和顺序不确定因素。如果上述公式中A是滤波器矩阵,便组成卷积混合,形成卷积分离算法。P阶线性卷积混合模型为

卷积混合信号的盲分离就是寻求P阶n×m的分离滤波器矩阵,使得

时域的卷积运算对应频域乘运算,混合过程为

式中H(z)是对应于通道的有限冲激响应(FIR)滤波器,x(z)和s(z)分别为混合信号向量和源信号向量的z域表示,则分离矩阵也可表示为

频域盲分离中,对于分离矩阵的非对角元素的时域迭代算法为

式中βi为输出信号yi在不同时段的能量。
频域盲分离处理的数据是复数,其评价函数为

向量x(t)在频率为ω时的频域相关矩阵为

则输出信号y(t)在频率ω处的频域相关矩阵为


图3 模拟信号时域原始波形Fig.3 The original signal waveform in time domain
式中W(ω)为频域分离矩阵[3-4]。
4 计算机仿真信号盲分离研究
首先仿真研究源信号瞬时混合情况下盲分离算法的效果,分别产生不同频率的信号源。随机产生混合矩阵,通过盲分离算法进行分离,分离出源信号的关键是选取合适的分离矩阵。单缸机的扭矩的瞬时波动很大,缸数越多,越趋于均匀。其大小与曲柄转角有关,是时间的函数,可表示为

式中:M0为平均扭矩;Ai为第i谐次扭矩分量幅值;φi为第i谐次扭矩分量的相角;i为简谐系数。
首先对上述信号的基频进行调整,使信号的倍频中出现个别信号频率相等。此时信号频率分别为f1=2 Hz,f2=6 Hz。则信号表达式为

将信号的倍频取到10倍频。第一个信号会在3倍频、6倍频、9倍频与第二个信号的基频、2倍频、3倍频出现频率重叠情况,即6 Hz、12 Hz和18 Hz会出现频率重叠而无法通过FFT进行分离的情况,可通过盲分离算法进行分离。结果如图3-8,其中图3和图4为模拟原始信号的时域和频域图,图5和图6为混合矩阵混合后信号的时域和频域,图7和图8为经过盲分离后信号的时域和频域图。
从分离时域频域波形中可以看出,算法能有效地分离出混合信号的原始成分,特别是频域重合信号的分离。而且算法0.03 s便完成收敛,分离指数为0.0864。

图4 模拟原始信号频谱Fig.4 The spectrum of the original signals

图5 模拟信号的混合波形Fig.5 The original signal mixing waveform in time domain
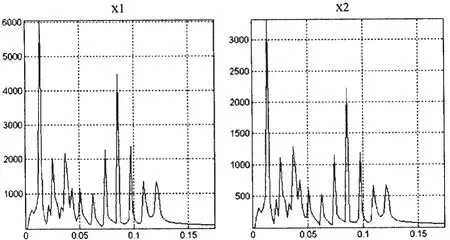
图6 模拟信号的混合波形频谱Fig.6 The spectrum of the original mixed signals

图7 经过盲分离分离出的信号Fig.7 The separated signal through the BSS in time domain
5 柴油机瞬时转速信号盲分离研究[5]
通过磁电传感器测量DF7G柴油机飞轮端瞬时转速,采集的数据依据插值法求解出瞬时转速。经过加窗、均值和白化处理后,分别取相同转速相同负荷的正常工况、单缸停油故障通过混合矩阵进行混合,然后通过盲分离算法分离。实验用柴油机缸数为12,运行转速825 rpm、负荷909 kW。其瞬时转速与盲分离结果如图9-12所示。可见,盲分离算法对实测瞬时转速数据也具有较好分离效果,瞬时转速的诊断中故障有无主要通过频谱,而具体对发生故障缸的定位主要利用故障缸的时域图中相位信息,这些关键数据都得以分离。因此,将盲分离方法用于柴油机瞬时转速信号分离具有一定的理论意义和研究价值。

图8 盲分离信号频谱Fig.8 The separated signal spectrum through the BSS method

图9 正常工况、第1缸故障和第2缸故障瞬时转速图Fig.9 Transient speed between different conditions:(a)Normal condition;(b)The fuel leakage condition for cylinder 1;(c)The fuel leakage condition for cylinder 2


图10 第2缸故障、第1缸故障、正常工况分离瞬时转速Fig.10 Separated transient speed between different conditions:(a)The fuel leakage condition for cylinder 2;(b)The fuel leakage condition for cylinder 1;(c)Normal condition

图11 正常工况、第1缸故障和第2缸故障瞬时转速频谱Fig.11 Spectrum of the transient speed between different conditions:(a)Normal condition;(b)The fuel leakage condition for cylinder 1;(c)The fuel leakage condition for cylinder 2

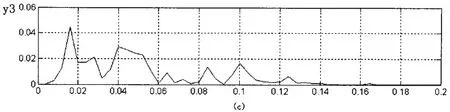
图12 第2缸故障、第1缸故障和正常工况分离瞬时转速频谱Fig.12 Separated spectrum of the transient speed between different conditions:(a)The fuel leakage condition for cylinder 2;(b)The fuel leakage condition for cylinder 1;(c)Normal condition
[1]孙云岭,朴甲哲,李 军.应用逆傅利叶变换进行内燃机瞬时转速信号提纯[J].内燃机工程,2004(2):57-60.
[2]张发启.盲信号处理及应用[M].西安:西安电子科技大学出版社,2006.
[3]史习智.盲信号处理理论与实践[M].上海:上海交通大学出版社,2008.
[4]Chang Yong,Hu Yihuai.Monitoring and fault diagnosis system for the Diesel engine based on instantaneous speed[C]//The 2nd International Conference on Computer and Automation Engineering(ICCAE 2010),February 26-28,2010.Singapore,2010:780-783.
[5]常 勇.船舶电站轴系瞬时转速仿真与诊断研究[D].上海:上海海事大学,2010.
