基于PLC自动重合闸装置的设计
2012-09-19符特宋福杰盛华军
符特 宋福杰 盛华军
(罗定职业技术学院,广东 罗定 527200)
0 引言
大多数电力系统故障基本都是输送电线路产生的相关故障,由于这种故障的瞬时性,所以,当故障出现后就会造成线路断开,此时只要在故障排除后,将断路器进行重新合闸就能够实现可靠性的供电。换句话说,也就是由于电力系统中产生类似瞬时性的故障,同时能够实现自己消除,继而使继电器的保护装置产生相应的动作,断路器通过自动重合闸装置实现自动合闸,减少了没有必要的停电,保证了电力系统的稳定工作。由此可以看出,重合闸成功与否决定于能否实现可靠的工作。传统的重合闸装置都是基于电磁式的控制,而本设计采用PLC控制实现自动化重合闸,这类重合闸具有很强的抗干扰能力、高可靠性及强扩展能力等。
1 电磁式控制的重合闸装置
电磁式控制的重合闸装置的工作过程是连续性的,动作完成的过程中任何一级动作出现故障,如,继电器出现动作拒绝、错误、卡住、熔焊时造成粘连现象和氧化等,针对其中的任意一个触点,继电器从开始启动后,由于某一级的原因使重合闸完成动作的信号无法发出,也就无法实现重合闸的功能。这种通过每级联动的控制方式大大降低了电力系统工作的可靠性。具体的多级工作过程如图1所示。
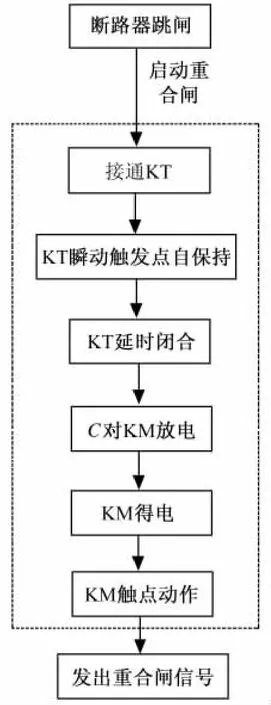
图1 多级工作过程
电磁式控制重合闸的内部电路中的HL是信号灯,它的主要任务是对自动重合闸装置的工作准备正常与否,以及中间继电器的触点KM完好与否进行监视。对电容C正常充电,信号灯HL继而点亮。重合闸的工作过程是:KM触点中的KM1、KM2、KM3、KM4常开触点如果被粘连住,相应的KM4常闭触点即断开,信号灯HL则熄灭。具体电路如图2所示。通过此监视过程可以看出,整个电路存在着较大的局限性,如果不能及时发现信号灯HL的变化,线路一旦发生相应的瞬时自消性的故障,那么自动重合闸装置就失去作用。

图2 重合闸内部继电器原理图
除此之外,由于电磁式控制重合闸装置只有多个继电器协同作用时,才能实现重合闸的功能,因此必须进行大量的导线连接,由此也增加了故障率,同时,由于大量的导线连接,加大了机器的调试与检修难度,不利于自动控制的实现。而且,这种传统的电磁方式控制的重合闸装置的功能又比较单一,扩展相应的控制功能比较困难。
2 重合闸自动化的PLC控制
2.1 设计思想
PLC控制器,由于其优良的性能,在条件恶劣的环境下能够可靠地工作,平均无故障时间可以达到5×104h以上。实现PLC的重合闸自动化控制,可利用已经过定义的各种内部辅助性的继电器对传统机械式的触点继电器进行替代,再加以软件的编程控制,实现硬件实际连接的逻辑关系替代,根本上完成相应动作的物理连接的简化。即当启动继电器相应保护性动作后,重合闸完成动作的信号只需经过PLC的逻辑性处理即可发出,触点在动作过程中不参与。由此,解决了传统的机械式的触点继电器的很多弊端,控制图如图3所示。

图3 PLC自动化控制框图
2.2 硬件设计
为了对PLC中输出的触点进行保护,只有借助于大功率的KA1和KA2微型继电器完成相应的合闸和分闸的信号转换,才能与断路器中的相应功能(合/分闸)的线圈进行连接。由于继电器KA1和KA2的线圈都是感性负载,故而分别并联一个二极管实现续流,以减少切换过程中的电磁干扰。采用UPS供电保证PLC安全工作,同时也可以更好地隔离一些干扰。利用PLC实现控制之后,只需要将合闸继电器和分闸继电器中的相应功能线圈和KA1、KA2继电器中常开的无源触点相连接形一控制回路,内部连接图如图4所示。利用软件编程实现自动重合闸及其他的保护性功能,简化了逻辑关系,整个线路的接线更加简单,便于维护系统的运行。
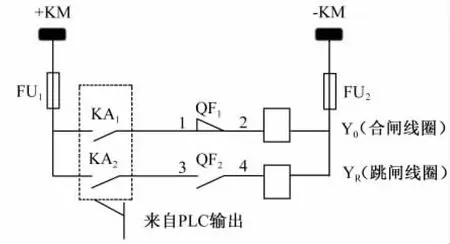
图4 系统内部接线图
根据系统控制要求以及需配置的I/O点数的分析,该设计选择一种超小型的PLC机型,这种机型不需要任何电缆的连接就可以对系统进行扩展。为便于相关工艺的更改或增加相应的控制功能,以及故障的维修,因此在确定具体的I/O点数时必须留有20%的备用量,以保证其扩展能力,具体连接图如图5所示。系统故障信号常规的接线方法有:一是通过并联的方式只使用了一个PLC的输入点;二是故障信号和I/O点一一对应。通过对接线方法分析可知,后者虽然达不到前者资源的节省,但却有利于实现报警的组态画面的显示。基于此,该设计选用第二种接线方法。

图5 I/O接线分配图
2.3 软件设计
利用PLC的控制方式实现重合闸的自动化功能,不仅可以实现传统的电磁式控制重合闸的所有的功能,还实现了灵活控制以及延时的高精度,完成的主要功能有:
1)重合闸完成相应的功能动作后,程序会进行自动返回初始化,为下一次的功能动作的完成做准备。
2)对断路器进行手动断开的操作或者当线路出现永久性的故障时进行合闸操作,进入锁定状态,即自动重合闸相应回路的闭锁功能。
3)完成重合次数的限制。
4)规定次数的重合闸的功能完成后,相应的功能动作信号不予发出即不完成相同动作。
5)跳闸和防止后加速。
6)按照瞬时自消性故障在线路中出现的性质,可以通过软件对重合闸动作的准备时间进行任意的延时设定的功能等。
自动跳闸和自动合闸流程图设计如图6所示。

图6 自动跳闸、重合闸流程图
由图6可知,利用PLC的控制方式实现防止跳闸的功能可以通过软件编程,从而达到替代传统电磁方式控制的重合闸装置中KM继电器的内部自保持回路,并且将继电器中的两级防跳措施常开触点及防跳专用的继电器进行串联,即对传统的电磁方式控制的重合闸的防跳功能的硬件实现措施进行完全替代。传统的电磁方式控制的重合闸装置对电容C进行充电需15~25 s,相应地,该时间即为重合闸进行动作准备的时间,在进行时间延时的程序编程时通过时间指令实现,基于线路出现具体的瞬时自消性故障的性质,通过软件对时间间隔的K值进行简单的任意性修改,RC回路中的元器件的参数不会对修改造成影响。延时自动重合闸动作的启动时间也可以进行软件设定,同样能够克服出现于钟表机构的停走的弊端。PLC实现的控制可以实现简单化的时间变更和高延时精度,精度最高可以达到0.001 s。
另外,由于传统的过电流保护中存在时间的限制,只要出现一次永久性的故障,就会造成故障时间的延续,进一步加剧危害。因此,必须实现故障时间的缩短。利用PLC的控制方式进行软件的编程设计,可以对自动重合闸进行后加速,主要是跳过执行延时定时器的程序段或者对延时定时器进行相应的更改,缩短延时时间,完成跳闸功能回路的直接接通,可加快故障切除速度,使危害程度降至最小。
对于完成自动重合闸实现重合功能次数的规定,可以通过计数器指令在梯形图中进行设计,如果规定次数N=1,则表示自动重合闸实现一次自动重合的功能。利用这样的编写设计保证程序控制功能的通用性。如果重合闸无法自动重合,并且已经完成了规定的重合次数,此时程序则会通过内部继电器及计数器对重合功能的程序段进行闭锁,重合闸功能停止。
3 结语
基于PLC的自动重合闸装置,实现硬件使用最少化及接线最简化,克服了传统的电磁方式控制的重合闸装置中复杂的接线及多动作级数等诸多弊病,提高了系统工作的可靠性。在软件设计上,保证传统电磁方式控制的重合闸装置功能的N次重合,即使需要增加新的控制功能,也不必对PLC设备进行硬件上的改变,只要完成对I/O点数的相应增加,再对程序进行改编便可以实现过压、过流等保护功能。而且还可以进行功能上的再扩展和开发,提高了系统的控制能力的实现和操作的灵活性,使系统更加实用与通用,自动化程度更高。
[1]张保会,尹项根.电路系统继电保护[M].北京:中国电力出版社,2005.
[2]黄伟兵.自动重合闸最优重合方案的设计[J].宁夏电力,2008(S1):83-92.
[3]牛建华,王任远.自动重合闸(ZCH)与继电保护配合技术研究[J].机电产品开发与创新,2007(5):64 -72.
[4]董惠勤,陆魁军.跨安全网闸的内外网数据库同步的实现[J].科技通报,2007(2):266-270.
[5]俞鸿斌.龙门刨铣床PLC控制系统改造和优化[J].科技通报,2008(4):516-521.
[6]葛耀峥,金波,陶国良,等.家具力学性能试验机PLC顺序控制器设计方法[J].科技通报,2000(6):462-467.
[7]赵华军.PLC在自动重合闸控制中的应用[J].工业控制计算机,2008(7):70-71.
