针对方向图综合的MIMO雷达双边自适应矩阵算法
2012-09-19刘宏伟杨晓超
王 勇 刘宏伟 纠 博 杨晓超
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
1 引言
近年来,多输入多输出(MIMO)雷达受到了广泛的关注[1-6]。根据天线的稀疏程度,MIMO 雷达可以分为分布式和集中式两大类。分布式MIMO雷达天线间距较大,具有空间分集增益,能提高对闪烁目标的探测能力[1,2];集中式MIMO雷达天线间距较小,每个天线可以发射不同的信号波形,具有较好的波形分集能力。与传统的相控阵雷达相比,集中式MIMO雷达拥有更高的目标分辨能力[3]和更好的参数辨识能力[4],并且可以根据需要进行灵活的方向图设计与波形优化[5]。
阵列信号处理的一个基本问题是方向图综合问题。根据加权方式的不同,方向图综合方法可以分为向量加权方法[6,7]和矩阵加权方法[8,9]两类。向量加权方法通过对回波进行向量加权来综合方向图,其方向图参数,比如主瓣宽度和旁瓣电平,不能精确地控制并根据不同的需要进行调整[9]。为了能更灵活地控制方向图,文献[8]提出了自适应矩阵算法(Adaptive Matrix Approach,AMA)。AMA算法能够对方向图的主瓣宽度和旁瓣电平进行严格地控制,其代价函数是一个半正定规划(Semi-Definite Programming,SDP),因此可以通过凸优化工具包CVX[10]求解其全局最优解。对于MIMO雷达来说,AMA算法虽然能够对发射接收双程的方向图进行灵活地控制,但算法处理的维数为发射阵元数与接收阵元数的乘积。对于较少的发射阵元和接收阵元,MIMO雷达AMA算法的处理维数也可能会很大。此时其计算复杂度和样本需求将很大。在向量加权方法中,为了降低MIMO雷达最小方差无畸变响应
(Minimum Variance Distortionless Response,MVDR)算法的计算复杂度和样本需求,文献[6]给出了一种双边 MVDR算法(Two-Sided MVDR,TSMVDR)。TS-MVDR算法采用权值分离的形式,通过迭代地求解两个更低维的权向量,在大大减少运算量的同时,其方向图也保证了主瓣方向不衰减并很好地抑制了干扰。但是,TS-MVDR算法的方向图参数,比如主瓣宽度和旁瓣电平,不能精确灵活地控制。当样本数较少时,TS-MVDR算法的方向图旁瓣较高。为了灵活地控制发射接收双程方向图并降低 MIMO雷达 AMA算法的运算量和样本需求,本文提出了一种 MIMO雷达双边 AMA算法(Two-Sided AMA,TS-AMA)。
2 MIMO雷达信号模型
对于一个由M个发射天线和N个接收天线构成的MIMO雷达系统,其结构如图1所示。系统发射的信号矩阵可以表示为表示第m(m=1,…,M)个发射天线所发射的编码信号,L表示编码长度(快时间维的采样点数)。若发射信号正交,并且各阵元发射的信号功率均相等且为单位功率,则发射信号的协方差矩阵Rss=SSH/L=IM,IM表示M×M维单位阵。令θ表示感兴趣目标的方位角,则发射导向矢量和接收导向矢量可分别表示为[4]

其中f0表示发射信号的载频,τi(θ)和(θ)分别表示信号从第i个发射天线到达目标的时延和从目标到达第j个接收天线的时延。在远场条件下,MIMO雷达接收到的信号可表示为[4,6]

其中β代表目标复散射系数,其正比于目标的雷达截面积(Radar Cross Section,RCS)。Z表示剩余项,包含了干扰和噪声。假设Z的列向量独立同分布,服从均值为零协方差矩阵未知的复高斯分布[6]。经过脉冲压缩以后,式(3)可以转化为[6]


图1 MIMO雷达系统结构示意图
3 MIMO雷达TS-AMA算法
3.1 TS-AMA算法的代价函数及求解
在本小节中,首先给出TS-MVDR算法代价函数的等价矩阵加权形式,然后在其基础上给出TS-AMA算法的代价函数。在矩阵加权方式中,TS-MVDR算法的代价函数等价于
其中符号E{·}表示取期望运算,||·||F表示矩阵的Frobenius范数,rank(·)表示取矩阵的秩。θ0表示感兴趣目标的波达角。U和V分别表示双边加权中的接收权矩阵和发射权矩阵。式(5)可以通过用U和V分别代替文献[6]中式(11)的u和v容易地得到。我们可以发现式(5)是非凸的,因为有优化变量的秩约束[9]。当去掉秩约束后,式(5)可以转化为

其中符号tr(·)表示取矩阵对角线元素之和。P=UUH,Q=VVH。定义接收方向图和发射方向图分别为式(6)是式(5)的半正定松弛问题(Semi-Definite Relaxation,SDR),可以找到全局最优解。但是式(6)不能灵活地控制方向图的主瓣宽度和旁瓣电平。当样本数较少时,其旁瓣较高。为了能够更灵活并且更精确地控制方向图,我们提出TS-AMA算法。其代价函数为

其中[θ1,θ2]表示给定的3 dB主瓣角域,ψ表示旁瓣角域。ς表示给定的峰值旁瓣电平。从式(7)可以看出,对于任意非零常数,即式(7)存在幅度模糊。为了消除幅度模糊,我们约束。当P和Q中的任何一个确定后,式(7)可以转化为关于另一个变量的优化问题。基于文献[11]的思想,我们用一个迭代算法来求解式(7)。
首先固定P,将式(7)转化为关于Q的代价函数

基于上面的分析,TS-AMA算法可以总结如下:
随机给定范数归一化的初始值P(0),对于k=1,2,…,重复下面的两步直
(1)将P(k-1)代入式(8),然后利用凸优化工具包CVX求解式(8)得到Q(k)。
(2)将Q(k)代入式(7)并求解得到P(k),然后利用式(9)对P(k)进行范数归一化。
3.2 样本需求和计算复杂度分析
当回波中不包含感兴趣目标时,AMA算法性能损失不超过 3 dB所需的样本数为2MN,而 TSAM A算法所需的样本数为 2 max{M,N}[6];当回波中包含感兴趣目标时,性能损失不超过3 dB所需的样本数为(K- 1)η,其中K表示算法处理的维数,η表示最优信干噪比[12]。此时 AMA算法所需的样本数为(MN- 1)η,而 TS-AMA算法所需的样本数(max {M,N}- 1)η。对比两种情况下两种算法的样本需求可以发现,本文所提算法所需的样本数大大少于AMA算法。由于TS-AMA算法性能损失不超过 3 dB所需的样本数小于 AMA算法的,并且TS-AMA算法的处理维数 m ax{M,N}小于AMA算法的处理维数MN,因此TS-AMA算法是一种降维方向图综合算法。AMA算法的运算复杂度为其中表示约束的个数[8]。TS-AMA算法的运算量主要在于迭代地求解式(7)。从图5可以看出如果δ=0 .0001,TS-AMA算法将在3~4步内收敛。因此TS-AMA算法的计算复杂度为相比 AMA算法,TS-AMA算法的运算量更小。虽然TS-AMA算法的处理维数更低、运算量更小,但在理想条件下,TS-AMA算法迭代地优化发射和接收权矩阵,性能将不如对权矩阵进行直接优化的AMA算法。
4 仿真实验
本文仿真采用等距线阵组成的收发共置的MIMO雷达系统,阵元数为7,相邻阵元间距为半波长。发射信号为正交多相码,编码长度为 256。在35°和60°方向存在两个强干扰,干噪比为50 dB。接收机噪声为高斯白噪声。本文比较了4种算法的波束综合性能:AMA算法[8],TS-MVDR算法[6],RCB算法[13]和TS-AMA算法式(7)。TS-MVDR算法和TS-AMA算法的终止参数δ=0.0001。RCB算法的导向矢量误差的l2范数平方的上界为ε=25。假定感兴趣目标(Target Of Interest,TOI)的方位角为θ0=0°,目标功率为。在下面的仿真中,TOI功率估计的仿真都是通过100次独立的蒙特卡洛实验平均得到的。AMA算法和TS-AMA算法关于方向图控制(Beam-Pattern Controlling,BPC)的参数如下:BPC(1):半功率波束宽度为9°,相应的旁瓣区是(- 9 0°,- 1 4.5°)和(14.5°,90°),峰值旁瓣电平ς=- 1 8 dB ; BPC(2):半功率波束宽度为15°,相应的旁瓣区是(- 9 0°,- 2 2°)和(22°,90°),峰值旁瓣电平ς=- 2 8 dB 。
仿真1 在本仿真中,我们考虑TS-AMA算法的方向图性能(图2-图4)。其中横虚线表示0 dB,3条竖虚线分别表示TOI和两个干扰的波达角。为了说明TOI对方向图的影响,我们给出2种情况下的方向图:(1)回波中不包含TOI。此时TS-AMA算法的性能损失不超过 3 dB所需的样本数为2max{M,N}=1 4,而AMA算法所需的样本数为2MN=9 8。图2给出了样本数为20时4种算法的方向图。从图2可以看出:即使样本数较少,TSMVDR算法和TS-AMA算法的方向图在主瓣保形的同时很好地抑制了干扰。而且TS-AMA算法还可以通过主瓣扩展将旁瓣很好地压低,这样有助于旁瓣区连片杂波的抑制。AMA算法为了主瓣保形和压低旁瓣,对干扰的抑制能力几乎丧失。RCB算法虽然较好地抑制了干扰,但由于样本数太少,旁瓣较高。(2)回波中包含 TOI。通过计算可以知道 TSAMA算法所需的样本数为(max{,} 1)M N-η=7 52640,而AMA算法所需的样本数为(MN-1)η=6 021120。对比(1)和(2)两种情况可以发现:当回波中包含TOI时,两种算法所需的样本数大大增加。对于情况(2),实际中的样本数很难达到上面的需求。图3给出了样本数为10000时4种算法的方向图。在存在2°的角度误差,即真实的目标方位角为2°的情况下,图4比较了样本数为400时4种算法的方向图。从图中可以看出:TS-MVDR算法的旁瓣较高,因为样本数较少。当存在角度误差时TS-MVDR算法由于信号相消,在TOI方向形成零陷。AMA算法和TS-AMA算法的方向图通过主瓣约束很好地保形,因此没有信号相消,而且都很好地抑制了干扰。但TS-AMA算法的主瓣保形能力和对干扰的零陷深度稍微比AMA算法的好。在存在角度误差的情况下,导向矢量误差的l2范数的平方ε0=2 4.11<ε,因此RCB算法对本文考虑的角度误差具有很好的稳健性。从图2-图4可以看出:TS-AMA算法通过迭代降维,样本需求大大减小,同时方向图可以灵活地控制,能够满足各种场合下对方向图的需求。另外,TS-AMA算法通过严格的方向图主瓣约束,避免了误差存在时的主瓣分裂问题,对角度误差具有一定的稳健性。
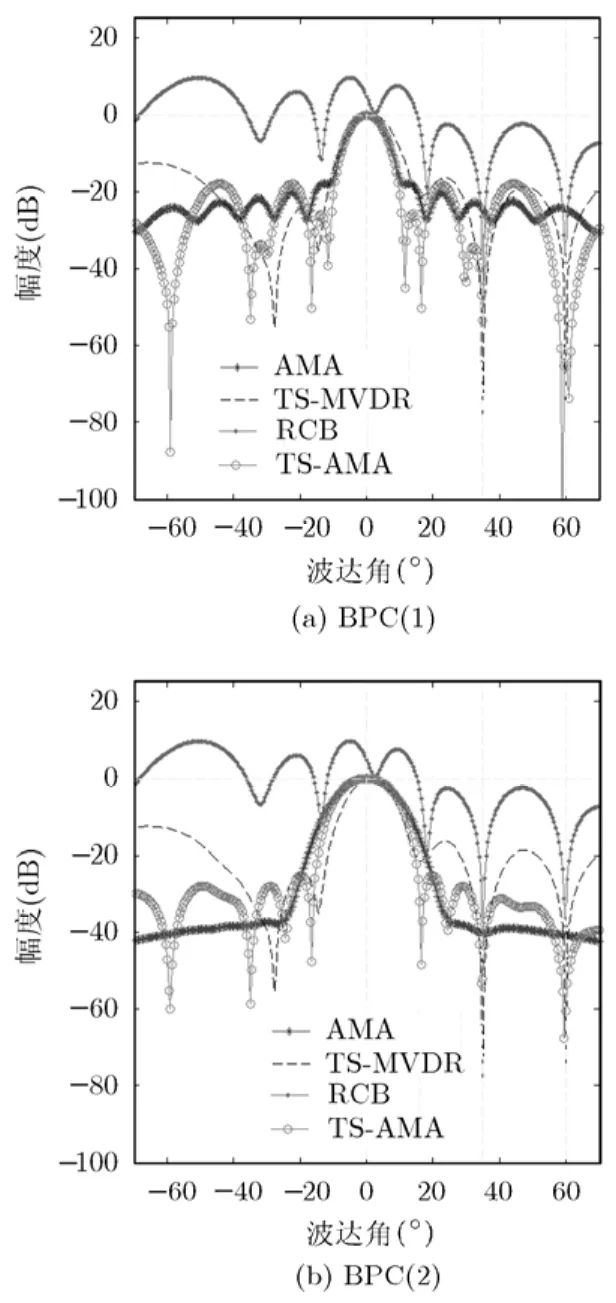
图2 样本数为20时TS-AMA算法的方向图(回波中不包含感兴趣目标)

图3 样本数为10000时TS-AMA算法的方向图(回波中包含感兴趣目标)

图4 存在2°的角度误差的情况下,样本数为400时TS-AMA算法的方向图(回波中包含感兴趣目标)
仿真2 在本仿真中,我们考虑对TOI的功率估计。功率估计在许多场合比如医疗成像、雷达和声纳中都有很重要的应用[13]。
在没有误差的情况下,图5给出了样本数为400时 TS-AMA算法的功率估计随迭代次数的变化曲线。从图5可以看出,在终止条件δ=0.0001的条件下,TS-AMA算法只需要 3~4步即可收敛。图6比较了这种情况下4种算法的功率估计随样本数的关系。另外,在存在2°的角度误差的情况下,图7给出了4种算法的功率估计随样本数的变化曲线。图中的横虚线表示真实的TOI功率。AMA算法需要估计MN×MN维的全维协方差矩阵,因此样本数必须大于等于MN=49。TS-AMA算法通过迭代地求解式(7),样本数只需大于等于max{M,N}=7。从图6和图7可以看出:4种算法在样本数较多的情况下TOI功率估计都比较准确。但当样本数较少,特别是少于20时,TS-AMA算法的功率估计更准确。样本不足引起的误差可以看做导向矢量的失配[12],因此RCB算法在小样本情况下的功率估计要好于TS-MVDR算法。对于TS-MVDR算法,样本不足引起的方向图高旁瓣使得其功率估计的性能变差。AMA算法需要估计全维的协方差矩阵,对样本的需求更大,因此在小样本情况下性能最差。
样本数为400时,图8和图9分别给出了在没有误差和存在2°的角度误差的情况下4种算法的功率估计随信噪比的变化曲线。图中的虚线表示真实的TOI功率。从图8和图9可以看出,在没有误差的情况下,4种算法的功率估计都比较准确。当存在角度误差时,TS-MVDR算法由于信号相消,功率估计的性能大大下降。而其他3种算法的功率估计相比没有误差的情况虽然有所下降,但还是比较准确的。而且从信噪比20 dB那点附近的局部放大可以看出,在没有误差的情况下,TS-AMA算法的功率估计最接近真实值。在存在角度误差的情况下,TS-AMA算法的功率估计虽然不如RCB算法,但要比AMA算法的准确。另外,从图8和图9还可以看出,TS-AMA算法的功率估计性能对信噪比的变化不敏感。

图5 样本数为400时TS-AMA算法的功率估计随迭代次数的变化曲线

图6 TS-AMA算法的功率估计随样本数的变化曲线(没有误差)

图7 TS-AMA算法的功率估计随样本数的变化曲线(2°角度误差)

图8 样本数为400时TS-AMA算法的功率估计随信噪比的变化曲线(没有误差)

图9 样本数为400时TS-AMA算法的功率估计随信噪比的变化曲线(2°角度误差)
5 结论
本文提出了一种MIMO雷达双边自适应矩阵算法(TS-AMA)来进行方向图综合。该算法将AMA算法的代价函数转化为一个双二次的代价函数,并通过双迭代求解大大降低了AMA算法的计算复杂度和样本需求,因此在小样本的情况下所提算法的功率估计更准确。但是,TS-AMA算法只是通过严格地约束方向图参数来对角度误差提供一定的稳健性。MIMO雷达稳健的方向图综合问题还有待进一步研究。
[1]Chong C Y,Pascal F,Ovarlez J P,et al..MIMO radar detection in non-Gaussian and heterogeneous clutter[J].IEEE Journal of Selected Topics in Signal Processing,2010,4(1): 115-126.
[2]He Q,Lehmann N H,Blum R S,et al..MIMO radar moving target detection in homogeneous clutter[J].IEEE Transactions on Aerospace and Electronic Systems,2010,46(3): 1290-1301.
[3]Bliss D W and Forsythe K W.Multiple-input multipleoutput (MIMO)radar and imaging: degrees of freedom and resolution[C].Proceedings of the 37th IEEE Asilomar Conference on Signals,Systems,Computers,Monterey,USA,2003: 54-59.
[4]Wang Hong-yan,Liao Gui-sheng,Wang Yong,et al..On parameter identifiability of MIMO radar with waveform diversity[J].Signal Processing,2011,91(8): 2057-2063.
[5]胡亮兵,刘宏伟,杨晓超,等.集中式MIMO雷达发射方向图快速设计方法[J].电子与信息学报,2010,32(2): 481-484.Hu Liang-bing,Liu Hong-wei,Yang Xiao-chao,et al..Fast transmit beampattern synthesis for MIMO radar with colocated antennas[J].Journal of Electronics&Information Technology,2010,32(2): 481-484.
[6]Feng Da-zheng,Li Xiao-ming,Lü Hui,et al..Two-sided minimum-variance distortionless response beamformer for MIMO radar[J].Signal Processing,2009,89(3): 328-332.
[7]Wang F,Balakrishnan V,Zhou P,et al..Optimal array pattern synthesis using semidefinite programming[J].IEEE Transactions on Signal Processing,2003,51(5): 1172-1183.
[8]Li J,Xie Y,Stoica P,et al..Beampattern synthesis via a matrix approach for signal power estimation[J].IEEE Transactions on Signal Processing,2007,55(12): 5643-5657.
[9]Xie Y,Li J,Zheng X,et al..Optimal array pattern synthesis via matrix weighting[C].IEEE International Conference on Acoustics,Speech and Signal Processing,Honolulu,HI,2007,2: 885-888.
[10]Grant M and Boyd S.CVX: Matlab software for disciplined convex programming[CP/OL].[2008-04-08].http://stanford.edu/~boyd/cvx.
[11]Feng Da-zheng,Zheng Wei-xing,and Cichocki A.Matrixgroup algorithm via improved whitening process for extracting statistically independent sources from array signals[J].IEEE Transactions on Signal Processing,2007,55(3): 962-977.
[12]Feldman D D and Griffiths L J.A projection approach to robust adaptive beamforming[J].IEEE Transactions on Signal Processing,1994,42(4): 867-876.
[13]Li J,Stoica P,and Wang Z.On robust Capon beamforming and diagonal loading[J].IEEE Transactions on Signal Processing,2003,51(7): 1702-1715.
