基于RTDS的机电-电磁暂态混合实时仿真及其在FACTS中的应用
2012-09-16李秋硕肖湘宁
李秋硕 张 剑 肖湘宁 李 伟 汪 建
(华北电力大学电气与电子工程学院 北京 102206)
1 引言
随着电力电子技术的在电力系统中的广泛应用,FACTS技术在电力系统稳定和控制方面发挥越来越重要的作用,但同时FACTS技术也对电力系统本身带来巨大的影响,尤其是当多个FACTS设备存在时,他们之间存在着相互影响。当这种影响使得各自的特性变好时,称为正交互影响;当影响使得特性变差时则称为负交互影响[1],这是我们不愿意看到的。当电力系统受到扰动后,在故障后瞬间,由于各元件中电场和磁场以及相应的电压和电流的变化,会产生持续时间为ns、μs、ms的快速暂态过程,称之为电磁暂态;而由于发电机和电动机电磁转矩的变化所引起的电机转子机械运动的变化以及机组励磁、调速系统的响应,从而产生持续时间为几秒钟、几分钟的暂态过程,称之为机电暂态[2]。利用实时电磁暂态仿真工具[3-7],可以与物理控制设备实现闭环连接,精确地模拟FACTS控制器的动态特性。但由于仿真算法与实时性的限制,电磁暂态仿真的规模受到限制,无法实现对大系统的实时数字仿真,需要对系统进行等值化简,影响了仿真的准确性。机电暂态仿真程序可以满足大系统实时仿真的要求,但在FACTS控制器研究中,基于基波向量模式的机电暂态程序难以模拟 FACTS装置的快速暂态特性、波形畸变特性以及次同步谐振等。
在实际系统中,电磁暂态过程与机电暂态过程是同时发生并相互影响的,如能把二者合并起来统一考虑,不但有助于了解大系统暂态稳定过程的动态特性,而且有助于对大系统中某一部分子网的详细暂态变化过程进行分析。尤其当系统中存在高压直流输电(HVDC)或FACTS装置时,传统机电暂态模型和直流准稳态模型已不能满足交直流混合电力系统精确分析的需要。机电-电磁暂态混合仿真具备机电暂态便于进行大系统分析优点,同时电磁暂态程序可对非线性元件精确描述,揭示电力电子设备对电力系统的影响,为大系统的精确建模分析提供了重要工具。由于FACTS控制器本身对于电力系统的影响范围有限,可对受FACTS控制器影响较大的部分系统采用状态变量方法建立详细模型进行电磁暂态仿真,而对于外部系统采用机电暂态仿真,既可以精确地模拟FACTS控制器的动态特性,又可以避免过多的网络等值简化对仿真准确性带来的影响,实现对含FACTS控制器的大系统的实时仿真。
近年来,众多学者对多FACTS存在的交互影响进行了研究[8-11],但多基于小系统或等值系统。本文基于国内外广泛应用的实时数字仿真器(RTDS),采用机电-电磁暂态混合仿真的方法,实现对大规模电力系统中 FACTS控制器电磁暂态过程的建模和仿真。利用RTDS自定义工具开发实时机电暂态仿真程序,并与RTDS电磁模型进行接口,建立混合实时仿真平台。文中将介绍混合实时仿真的基本原理、接口模型以及机电暂态仿真在RTDS上的实现,最后通过仿真算例证明所提混合实时仿真方法的有效性和实用性。
2 混合实时仿真原理
一定意义上来说,电力系统机电-电磁暂态混合仿真就是机电暂态仿真和电磁暂态仿真两者的组合,其基本原理如图1所示。
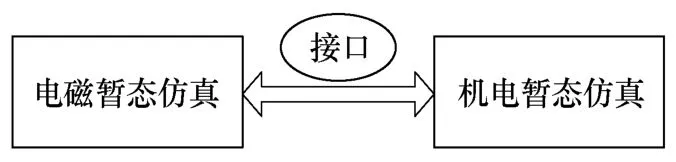
图1 机电-电磁暂态混合仿真原理图Fig.1 Principle diagram of electromechanical transient and electromagnetic transient hybrid simulation
对于外部常规交流系统,其动态响应过程相对较慢,其动态特性对需要详细研究的局部系统影响不大,采用机电暂态程序进行仿真,仿真步长为毫秒级,仿真数据只包含基波向量;而对于需要详细研究的局部系统,采用电磁暂态程序进行仿真,仿真步长为微秒级,仿真数据基于瞬时值。
在混合仿真进行时,一侧进行仿真计算时,另外一侧采用等效电路代替,数据交换只发生在机电暂态步长点,即每隔一个机电暂态计算步长的时间,两次进行一次数据交换。假定机电暂态仿真步长为10ms,电磁暂态仿真步长为50μs,则机电侧进行一步计算,电磁侧要进行200次计算,在此过程中两侧没有数据交换。
由于机电暂态和电磁暂态仿真程序在仿真机理、数学模型、数据表示方法等方面存在很大差异,因而在进行数据交换时,机电仿真中基于正、负、零序表示的基波向量和电磁侧基于abc三相瞬时值表示之间必须进行数据形式转换。
3 接口技术
3.1 接口位置选择
含FACTS和HVDC装置的电力系统,考虑到电磁暂态程序仿真规模和数值计算的稳定性,接口位置一般选择在 FACTS等电力电子装置连接变压器一次母线或HVDC换流器交流母线处。
当发生不对称故障或者靠近逆变器终端故障时,相位不平衡以及谐波引起的波形畸变问题较为严重。1988年Reeve和Adapa把接口位置延伸到交流系统内部,使接口的形式变得灵活多样,防止接口处的波形畸变过于严重[12,13],但增加了接口复杂性,降低了计算效率。
3.2 机电暂态侧等效电路形式
电磁侧进行仿真计算时,机电侧需用合适的等效电路代替。由于机电侧网络仿真规模大,通常为有源系统,且网络参数近似符合线性关系,所以对外部系统来说可以直接用戴维南(或诺顿)等效电路代替,如图2所示。其中Eeq,Zeq分别表示戴维南等值电压和等值阻抗。

图2 机电侧戴维南等效电路Fig.2 Thevenin equivalent circuit on electromechanical side
在交直流混合系统的仿真中,机电侧的基波等值阻抗有时候不能反映外部系统的谐波阻抗特性,存在单纯用基波等值阻抗难以描述系统高频特性、谐波放大等问题。1995年 Anderson等在机电侧采用了与频率相关的等值阻抗电路形式,只需很小的计算代价就较好地解决交直流混合电力系统仿真中接口处波形畸变的问题[14-16]。
在机电-电磁暂态混合仿真平台中,电磁侧仿真时,机电侧采用实时戴维南等效电路[17]参与计算。以单端口为例说明其等效原理。电路结构如图3所示。机电侧与电磁侧的接口为pq,其中一端节点p为网络节点,另一端节点q为参考接地点,ML是网络节点-端口关联向量。

图中,Req,Leq分别表示戴维南等值电阻和等值电抗,ueq表示戴维南等值电压,i(t) 表示节点注入电流。
机电侧网络方程为


图3 机电侧单端口戴维南等效电路Fig.3 Thevenin equivalent circuit of single port on electromechanical side
式中,是节点电压列向量,˙是节点注入电流列向量,Y是节点导纳矩阵。在p点注入单位电流向量,可求出戴维南等值阻抗为


由于机电侧的计算量为单相的基波相量值,而电磁侧采用的是三相瞬时值,因此机电侧的电气量要想参与电磁侧的计算必须进行离散化处理,按照式(5)对等值电压进行离散化:

3.3 电磁暂态侧等效电路形式
机电侧进行仿真计算时,电磁侧也必须用合适的等效电路来代替。由于电磁侧的元件和结构较为复杂,包含 FACTS控制器、HVDC或者其他非线性电力电子器件,考虑到机电暂态程序仿真方法和模型,一般可采用恒功率负荷模型,将电磁侧等值为一个功率源注入到电磁侧,如图4所示。图中Seq表示等值功率注入。

图4 电磁侧恒功率等效电路Fig.4 Constant-power equivalent on electromagnetic side
机电侧参与计算的量为基波相量值,因此单纯使用电磁侧的瞬时值是不能够直接参与机电侧的计算的,需要提取电磁侧的基波相量值。本文所述的混合仿真平台采用了基于单相变换平均值法的dq-120变换算法[18]。方法原理如下:
首先通过单相变换平均值法求出每一相电压的幅值和相角,假设单相电压信号为

将式(7)和式(8)化简得

对d()ut和q()ut取基波半个周期整数倍的平均值,则可以由此求出X和Y的值,从而可以得到电压幅值和相位

根据正负零序电压和三相电压的关系可得正序电压


dq-120变换算法是三相分别进行的,因此基波的提取不存在不对称分量的干扰,同时具备较高的计算速度。在此基础上电磁侧采用恒功率源模型进行等值,即提取基波正序分量后计算注入机电系统的功率,作为电磁网络在机电网络中的接口等效电路。该方法既可满足三相不对称、波形畸变情况下两侧系统等值需要,又可保证仿真的实时性。
3.4 数据交互时序
在接口的处理中,必然存在机电暂态网络和电磁暂态网络数据的交互。数据时序交互主要有机电侧延时一个机电步长、电磁侧延时一个机电步长及并行数据交互方式。
由于在整个的机电-电磁暂态混合仿真过程中,RTDS始终处于连续的实时运行状态,不存在任何等待时刻,因此采用并行交互时序,即在每一个机电步长结束时刻,电磁侧将等值处理后的参数传递给机电侧的同时,机电侧也将其等值处理后的结果传递给电磁侧,从而完成接口信息的传递。采用该方法,机电和电磁暂态子程序在计算过程中都不需要等待,各子系统并行计算,提高了计算速度,可以满足接口处实时交换数据的要求。接口模型如图5所示。
4 机电暂态仿真在RTDS中的实现
对于大规模的电力系统,要实现全电磁的实时仿真是困难的,因此许多研究者提出了机电-电磁暂态混合仿真。本文基于RTDS电磁仿真平台实现这一技术。将系统中要详细研究的,需要观察其电磁暂态特性的部分,如含HVDC、FACTS设备的区域系统,放在电磁侧进行电磁暂态仿真;将包含节点数目较多,只关心发电机功角等机电特性的系统放在机电侧,进行机电暂态仿真,这一功能通过RTDS中的自定义工具CBuilder来实现。
在CBuilder下,通过编制相应的程序来实现某些功能。RTDS的GPC处理器拥有强大的计算能力,在CBuilder下创建的自定义仿真模型在能够编译通过后,可在 RTDS下严格的实时运行,实时性由RTDS的硬件本身和实时编译系统保证。CBuilder下的自定义模型程序代码分为以下四个分区:STATIC区、RAM_FUNCTIONS区、RAM区以及CODE区。STATIC区用来定义整个计算过程中需要用到的数据,相当于系统的全局变量;RAM区完成程序启动前的一些工作,如从文件中读取数据,调用子函数等;RAM_FUNCTIONS区对RAM区所要用到的子函数进行定义和实现;CODE区内的代码在模块运行过程中被循环执行,是自定义模块运行时重复执行的部分,用来完成每个时步的计算。本文在CBuilder下建立混合仿真所需要的机电暂态仿真程序,包括机电侧的潮流计算,机电暂态初始化以及机电暂态迭代计算等。
尽管可以在CBuilder下编制相应的机电暂态程序,但是由于RTDS本身的计算能力以及CBuilder数据存储能力有限,在一定程度上限制了机电侧仿真系统的规模,为此本文采用了以下方法对机电侧的仿真进行改进。
(1)网络化简。在机电暂态程序中要进行网络方程的求解,随着系统规模的扩大,网络方程的阶数也在逐渐的扩大,引起网络方程求解计算量的扩大。这样既消耗时间,又占用大量内存。采用高斯消去法对网络进行化简,只保留发电机节点和与电磁侧接口的节点,大量减少计算量。
(2)多线程技术。机电侧仿真步长较大,一般为 10ms;电磁侧仿真步长较小,一般为 50μs。在CBuilder中,机电侧在一个步长内通常要完成100~200次的迭代,而每一次的迭代都要完成相应的方程求解。当系统规模扩大时,每次迭代(一个小步长)所要求解的方程阶数也在扩大,这样很可能一次迭代不能完成相应的计算,引起程序出错。为此在机电暂态程序的迭代计算过程中引入多线程技术,将原来一次迭代所要完成的任务分解成若干部分,分散到若干个小步长内完成,它们按顺序连接在一起形成整个暂态计算过程。
5 混合仿真应用于FACTS研究
RTDS为用户提供了几种常用的FACTS装置模型,如 SVC、晶闸管控制串联电抗器(TCSC)以及电压型变换器(VSC)等等,其中VSC可以用于静止同步无功补偿器(STATCOM)的仿真,也可以通过两个 VSC共用直流侧的方法实现统一潮流控制器(UPFC)的仿真。以上几种模型都属于大步长的仿真模型(仿真时步大于 50μs),可以直接同主网络连接。但是,对于含有GTO及IGBT等全控型开关器件的FACTS装置(如VSC),在这样大的计算步长下,开关频率以及脉冲触发算法的准确性都会受到影响。在早期RTDS上,为解决这个问题,用户在RTDS外部搭建含有全控器件的FACTS装置的物理模型,通过数-模变换器、电压放大器、电流互感器、模-数变换器和RTDS对接。但由于电压放大器等外部设备的引入会产生较大的延时,导致接口回路不稳定。新版RTDS为常用的含有全控型器件的FACTS装置提供了VSC模型子网络,解决了这些问题。在实际仿真实验中,具有VSC拓扑结构的模型可以搭建在这种子网络中,并可以通过接口模块同主网络相连接。主网络以标准步长求解(一般为 50μs),VSC模型子网络则以 1.4~2.5μs的步长求解。这样既可以采用较高的开关频率,采用较为精确的脉冲触发算法,同时缩短了由于外部设备接入引起的传输延时,避免了由此引发的接口回路的不稳定,保证了仿真的实时性和准确性。
在较大规模的电力系统中,要研究的 FACTS装置可能分散在多个距离较远的区域。由于FACTS之间的交互影响受装置接入点之间电气距离影响较大,通常采用等值的方法对局部系统进行仿真研究。但是,等值系统往往会影响到整个系统的动态特性,从而可能会低估FACTS间的负交互作用。因此本文提出采用机电-电磁暂态混合仿真搭建系统,将不含有FACTS装置的系统放到机电侧,通过接口同电磁侧连接,保证了原系统的动态特性。
6 仿真算例分析
6.1 系统结构与接口选取
为了分析方便,算例采用节点数较少的系统。图6所示为试验系统单线图。母线1~9形成环网,采用典型的IEEE 9节点系统;其余部分由两台等值发电机G4、G5和三条交流输电线路组成,包含一条 150km的 500kV输电线路和与之相连的500/220kV变电站(母线10、11)。其余线路的电压等级均为220kV。

图6 试验系统Fig.6 Testing system
系统在负荷侧采用两台SVC装置,分别接在距离负荷较近的母线12和母线13处,用于补偿无功功率和由负荷变化引起的电压波动。为了能够较为详细地研究SVC的功能及两台SVC之间的相互影响,机电与电磁侧的接口选在母线4处,将IEEE 9节点系统放在机电侧进行机电暂态仿真,仿真步长为 10ms;将含有SVC的系统放在电磁侧进行较为精细的电磁暂态仿真,仿真步长为50μs。
6.2 SVC模型
目前 RTDS的操作系统 RSCAD中提供两种SVC模型,实验系统使用了其中较新的一种模型rtds_sharc_SVC4,如图7所示。

图7 RTDS中的SVC模型Fig.7 SVC model in RTDS
该模型提供了TCR与TSC两种可选择的SVC补偿设备,使用时可以根据具体的需要通过选择参数卡中的选项选择要投入的设备类型。rtds_sharc_SVC4模型的三组TCR/TSC采用角形联结方式,每组TCR/TSC通过两个反并联晶闸管和电感(或电容)与电阻串联。此外,晶闸管上还并联有阻容回路,用来减小晶闸管在开关过程中产生的过电压、过电流。
在试验系统中,两台SVC均采用了TCR+TSC的复合控制装置对其所接母线的电压进行控制,两台SVC的容量相同,其中TCR的容量为117Mvar,TSC的容量为92Mvar。
6.3 实验对比
图8为系统等值后单线图。试验系统机电侧网络用等值电压源和系统等效阻抗进行等效。

图8 等值后试验系统Fig.8 Equivalent testing system
改变母线 13处的负荷,分别采用不同的 SVC组合方式对母线12和母线13的电压进行控制,对比等值后的系统仿真,未等值系统的全电磁仿真以及混合仿真中SVC之间的相互作用情况见表1~表3。

表1 等值系统仿真结果Tab.1 Simulation result for equivalent system

表2 未等值系统全电磁仿真结果Tab.2 Electromagnetic transient simulation result for full scale system
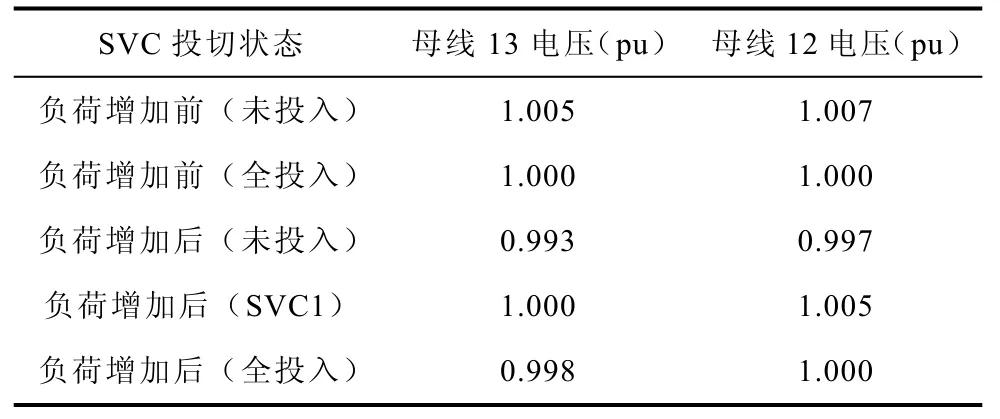
表3 系统混合仿真结果Tab.3 Hybrid simulation result for system
从表1可以看出,对于等值后的系统,SVC对电压的控制是比较理想的,在电压偏离整定值时,SVC可以进行有效的调节。表2及表3表明,全电磁仿真与机电-电磁暂态混合仿真的结果基本一致,一方面说明了混合仿真的有效性,另一方面,通过两个未等值系统的仿真可以发现,当只投入SVC1时,母线13的电压得到了较好的控制;当同时投入SVC1与SVC2时,尽管母线12的电压得到有效的控制,但是此时SVC1中的TSC全部投入,TCR全部退出,母线 13的电压仍略低于整定值。产生这种现象的原因通常是由于两个 FACTS装置之间产生了负交互影响致使其中一个或多个FACTS装置的控制特性变差造成的。由于等值以后的系统对含有 SVC侧系统的电磁和机电影响没有实际系统复杂,因此 SVC的控制特性也就相对简单,不会出现全系统仿真时表现出的负交互影响。当系统规模变大后,特别是发电机及其控制系统(如PSS)较多且距离SVC装置较近时,这种交互影响会更加明显。
7 结论
本文研究了基于RTDS的电力系统机电-电磁暂态混合实时仿真技术及其在 FACTS技术中的应用。混合仿真技术既可以满足对大系统实时仿真的要求,同时还可以精确地模拟电力电子设备快速的动态特性,提高仿真的精度和准确性。FACTS设备只对局部系统产生直接影响,受接入点位置影响较大,因此适合用混合仿真技术对其进行仿真分析,仿真算例证明了混合仿真结果的准确性。混合仿真技术的应用为 FACTS研究和发展提供了新的工具和视角。
[1]曹一家, 陶佳. FACTS 控制器间交互影响及协调控制研究进展[J]. 电力系统及其自动化学报, 2008,20(1): 1-8.
Cao Yijia, Tao Jia. Research progress on interaction and coordinated control among FACTS controllers[J]. Proceedings of the CSU-EPSA, 2008, 20(1):1-8.
[2]王哲, 张豪. 电力系统机电-电磁暂态混合仿真接口技术[J]. 电力科学与工程, 2009, 25(4): 5-10.
Wang Zhe, Zhang Hao. Technology of interfaces for hybrid simulation of power system electromagneticelectromechanical transient process[J]. Electric Power Science and Engineering, 2009, 25(4): 5-10.
[3]Dommel H W. Digital computer solution of electromagnetic transient in single and multi-phase networks[J]. IEEE Transactions on Power Apparatus and Systems, 1969, 88(4): 388-399.
[4]Long W, Cotcher D, Ruiu D, et al. EMTP a powerful tool analyzing power system transients[J]. IEEE Computer Applications in Power, 1990, 3(3): 36-41.
[5]Marti J R, Linares L R. Real-time EMTP-based transients simulation[J]. IEEE Transactions on Power Systems, 1994, 9(3): 1309-1317.
[6]张民, 石岩. 同杆并架±500kV直流系统间相互影响的实时仿真分析[J]. 电网技术, 2007, 31(1): 44-49.
Zhang Min, Shi Yan. Real-time digital simulation analysis on interaction between two ±500kV HVDC system erected on the same tower[J]. Power System Technology, 2007, 31(1): 44-49.
[7]马玉龙, 陶瑜, 周静, 等. 基于实时数字仿真器的特高压直流换流单元投退特性分析[J]. 电网技术,2007, 31(21): 5-10.
Ma Yulong, Tao Yu, Zhou Jing, et al. Analysis on deblocking and blocking characteristics of UHVDC commutation units based on real-time digital simulator[J]. Power System Technology, 2007, 31(21):5-10.
[8]李亮, 邹振宇, 江全元, 等. SVC和TCSC控制器间交互影响[J]. 江南大学学报, 2006, 5(1): 78-81.
Li Liang, Zou Zhenyu, Jiang Quanyuan, et al. Interaction analysis between SVC and TCSC controllers in multimachine power system[J]. Journal of Jiangnan University, 2006, 5(1): 78-81.
[9]张琳, 叶彬, 曹一家. 基于多目标混合进化算法的多台 TCSC控制器协调设计[J]. 江南大学学报,2008, 7(4): 453-458.
Zhang Lin, Ye Bin, Cao Yijia, et al. Application of muli-objective hybrid evolutionary algorithm to coordinate multiple TCSC controllers in power system[J]. Journal of Jiangnan University, 2008, 7(4):453-458.
[10]叶彬, 朱承志, 邹振宇, 等. 柔性交流输电系统控制器的多目标协调设计[J]. 浙江大学学报, 2007,41(2): 294-298.
Ye Bin, Zhu Chengzhi, Zou Zhenyu, et al. Multiobjective coordinated design for flexible alter-native current transmission system controller[J]. Journal of Zhejiang University, 2007, 41(2): 294-298.
[11]Li Xiaohui, Wu Huaren, Liu Jingjing. Coordinated Design of wide area controllers and FACTS controller for enhancement of power system stability[C].International Conference on Power System Technology,2010.
[12]Reeve J, Adapa K. A new approach to dynamic analysis of AC networks incorporating detailed modeling of DC systems. part I: principles and implementation[J]. IEEE Transactions on Power Delivery, 1988, 3(4): 2005-2011.
[13]Reeve J, Adapa K. A new approach to dynamic analysis of AC networks incorporating detailed modeling of DC systems. part II: application to interaction of DC and weak AC systems[J]. IEEE Transactions on Power Delivery, 1988, 3(4): 2012-2019.
[14]Anderson G W J, Watson N R. A new hybrid algorithm for analysis of HVDC and FACTS systems[J]. IEEE Energy Management and Power Delivery, 1995, 2(21-23): 462-467.
[15]Anderson G W J. Hybrid simulation of AC-DC power systems[D]. Christchurch, New Zealand: University of Canterbury, 1995.
[16]Watson N R, Arrillaga J. Frequency-dependent AC system equivalents for harmonic studies and transient converter simulation[J]. IEEE Transactions on Power Delivery, 1998, 13(3): 1196-1203.
[17]张伯明, 陈寿孙, 严正. 高等电力网络分析[M]. 北京: 清华大学出版社, 2007.
[18]肖湘宁, 韩民晓, 徐永海, 等. 电能质量分析与控制[M]. 北京: 中国电力出版社, 2004.
