永磁直线伺服系统最优参数负载扰动补偿方法
2012-09-16王丽梅武志涛刘春芳
王丽梅 武志涛 刘春芳
(沈阳工业大学电气工程学院 沈阳 110870)
1 引言
现代高精度永磁直线进给伺服系统要求驱动系统具有快速性的同时,且对负载扰动和系统参数的变化具有强鲁棒性[1,2]。为了保持伺服系统具有良好的性能,文献[3,4]采用鲁棒控制方法来抑制永磁直线电机伺服系统的扰动。文献[5]提出一种将扰动观测器和重复控制器相结合的控制策略。文献[6]提出了反馈线性化和极点配置的观测器相结合的扰动抑制控制方案。本文提出利用模型参考自适应理论设计负载扰动补偿器。模型参考自适应控制这一设想在20世纪 50年代由考得威尔(Goldwell)提出,现已成为实现高性能控制系统中重要的解决方案,特别是当动态特性不明,或有大的变化时,模型参考自适应系统能实现快速的动态响应[7,8]。
本文为兼顾系统响应性能和抗干扰能力的要求,采用了位置控制器与负载扰动补偿器相结合的控制策略。其中位置控制器决定系统的瞬时响应特牲,而负载扰动补偿器则用来改善抗干扰能力。位置控制器采用以频域因子分解法求解最优的位置控制器;负载扰动补偿器使用 PI结构,通常比例-积分控制器的参数均使用试凑法确定,缺乏系统化的设计,本文提出根据 Parseval定理中信号在时间域内的总能量与频域内的总能量相等的原理将时域二次型性能指标转为频域性能指标,再通过对劳斯-赫尔维茨(Routh-Hurwitz)二维数组的计算,可解析化地计算出负载扰动补偿器PI参数的最优值,并且大大简化了计算过程。
2 永磁直线同步电机简化数学模型
PMLSM的工作原理如图1所示。

图1 永磁直线同步电动机工作原理Fig.1 Basic principle of PMLSM
对PMLSM进行矢量控制,即要求动子电流矢量与定子永磁体磁场在空间上正交。电流内环采用励磁分量id=0的控制策略,电磁推力F与iq成正比,则PMLSM的运动方程为[9]

式中iq——q轴动子电流;
λPM——定子永磁体产生的励磁磁链;
v——动子线速度;
B——粘滞摩擦系数;
τ——极距;
M——动子质量;
Kf——电磁推力系数;
FL——负载扰动。
3 位置控制器设计
为了使直线伺服系统具有快速的瞬时响应及最小的超调量,本位置控制器采用频域最优因子分解设计方法[10],最优的闭环特征多项式是由开路被控对象的分母因式及权重因子乘以分子因式之和所组成,其关系式如下

式中,(s)是闭环传递函数的分母式;(s)和(s)分别是开环传递函数的分母式和分子式。
其位置控制系统如图2所示。
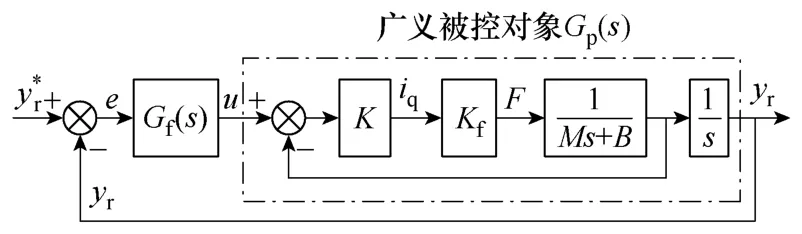
图2 位置控制系统原理图Fig.2 Block diagram of the position control system
广义被控对象的传递函数可表示为

式中,K是控制器的定值增益;速度回路设计为比例控制器。
由式(4)可得,被控对象传递函数的分母为分子为


此时最优化的闭环特征多项式可表示为
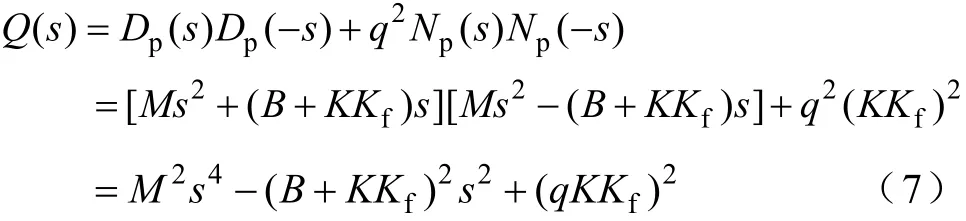
式(7)是由开路被控对象的分母因式、分子因式和加权因子q所组成的四阶方程式,此多项式含有四个特征根,其中两个特征根在左半平面,另外两个特征根则在右半平面,且相互对称于虚轴,由于要求闭环系统是稳定的,所以取左半平面的两个特征根做为最优化系统闭环极点,此时式(7)可重新表示为


此时整个闭环系统最优化传递函数即可表示为


式中,c()Ns是闭环传递函数的分子式,则最优化位置控制器为

4 负载扰动补偿器设计
为了使系统具有良好的抗干扰能力,本文采用位置控制器和负载扰动补偿器相结合的独立结构设计方法,如图3所示,图中xr是在加载时系统期望的位置响应,x是系统实际的位置响应,Gz(s) 是未加入负载扰动补偿器之前控制系统闭环传递函数,Δx为负载干扰加入后产生的位置偏差量。由于无载时,期望的位置响应xr和实际的位置响应x相等。所以,负载干扰位置偏差量Δx为零,使得由位置命令xd到实际位置x之间定向控制回路的响应,不会受到负载补偿的影响,故位置控制器和负载扰动补偿器可分别独立设计,不会相互影响。

图3 基于负载扰动补偿器的控制系统原理图Fig.3 Block diagram of the control system based on load disturbance compensator
外来的负载干扰加入后,会产生位置偏差量Δx,经过负载扰动补偿器产生Δu,Δu可做为外来的负载干扰位置控制系统的补偿量,而负载扰动补偿器包含Kp和Ki两个参数,利用参数最优化的方法,可求得在负载干扰时,位置偏差量为最小值的Kp和Ki最优参数值。


将式(4)、式(9)代入式(10)中,并重新整理可得

式中

欲使位置偏差量最小时,本文以下列二次式作为性能指标

直接由式(13)寻找最优的补偿器PI参数甚为困难,故将上述时域转换为频域进行讨论,基于Parseval定理中信号在时间域内的总能量与频域内的总能相等的原理将时域二次型性能指标转为频域性能指标表示[11]



其中n——系统阶数。
此时式(14)可表示为

再利用劳斯-赫尔维茨(Routh-Hurwitz)数组[12]计算出式(15)的性能指标Jd。
将式(12)代入式(14)可得式(16)。
由 Routh-Hurwitz数组可得最小化性能指标的解析解为[12]

再经由下列两个偏微分联立方程式组可解得最优的Kp和Ki参数值

5 仿真与实验结果及其分析
实验所用 PMLSM 参数为:电磁推力系数Kf=25N/A,动子质量标称值M=11kg,粘滞摩擦系数标称值B=1.2 N⋅m /s ,动子电枢电阻Rs=1.2Ω,定子极距τ=0.03m,动子极数pn=3,永磁体有效磁链标称值ψf=0.001Wb。外部负载阻力为FL=100N。
图4为当输入为正弦(1mm,0.6Hz)位置曲线,且动子和动子所带负载的总质量Mn=2M时,使用最优 PI值和使用经验PI值时,伺服系统的动子实际输出轨迹曲线和位置误差曲线。
图5为当输入为单位阶跃曲线,且动子和动子所带负载的总质量Mn=2M时,使用最优PI值与使用经验PI值,直线伺服系统的动子位置实际输出轨迹曲线以及位置误差曲线。
图4a和图5a是输出轨迹曲线,可以看出系统的鲁棒性与动态特性良好。图4b和图5b分别为正弦位置输入、阶跃位置输入时的位置误差曲线,且可见位置误差仿真结果为-6~6μm。由图 4和图 5可见,负载扰动补偿器PI参数选用本文计算方法在保证跟踪精度的同时,能使永磁直线伺服系统得到更好的扰动抑制效果。
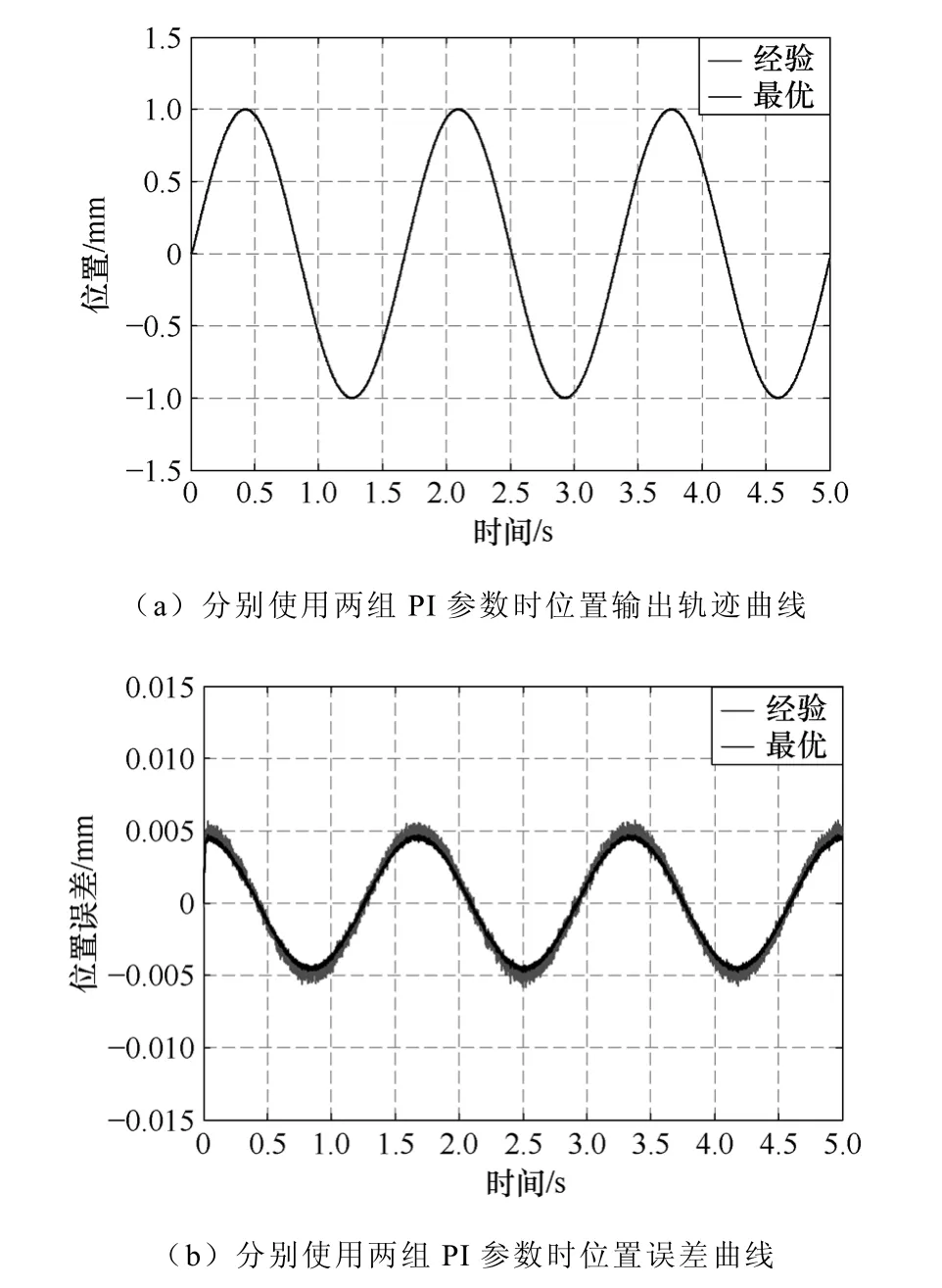
图4 当正弦位置输入时系统仿真结果Fig.4 Simulation results of the system with sin position input



图5 当阶跃位置输入时系统仿真结果Fig.5 Simulation results of the system with step position input
利用基于DSP控制的PMLSM伺服系统对以上仿真进行了实验验证,主要由PMLSM、PC + DSP运算控制单元、IPM主回路功率变换单元、动子电流检测单元和直线光栅尺速度检测单元等组成,其硬件结构如图6所示。
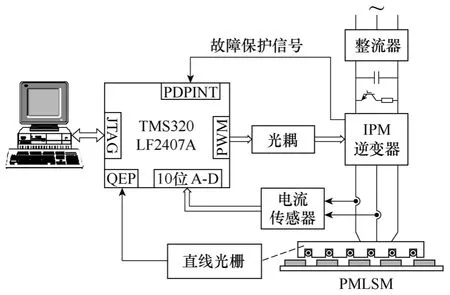
图6 基于DSP的PMLSM控制系统硬件结构原理框图Fig.6 Hardware frame map of PMLSM control system based on DSP
图7为负载扰动补偿器使用本文最优PI值和使用经验PI值抑制扰动的正弦位置误差曲线。图8是阶跃位置误差曲线。通过对比图7a与图7b、图8a与图8b可知,无论是正弦输入还是阶跃输入,基于负载扰动补偿器的高精度永磁直线进给伺服系统能有效地抑制负载变化扰动,保证位置误差小于10μm,仿真结果与试验结果基本一致。同时,负载扰动补偿器使用本文计算方法所得最优 PI参数能得到更好的扰动抑制效果和跟踪精度。

图7 正弦位置输入时实际位置误差曲线Fig.7 Actual position errors with sin position input

图8 阶跃位置输入时实际位置误差曲线Fig.8 Actual position errors with step position input
6 结论
本文针对高精度永磁直线进给伺服系统的特点,提出了位置控制器与负载扰动补偿器相结合的扰动抑制方法。在负载扰动补偿器的PI参数确定上,提出根据Parseval定理将时域性能指标转为频域性能指标求得最优值的计算方法,此方法解决了求解二次型性能指标须先变状态方程,再计算黎卡提方程式(Riccati equation)的解,然后再求线性二次型最优值的传统计算过程(即LQ问题),既简化了计算步骤,又可使计算过程解析化。通过理论分析、仿真、实验验证了采用参数最优化的负载扰动补偿器能有效地抑制负载扰动,提高了系统的控制精度,增强了伺服系统的鲁棒性。
[1]张春良, 陈子辰. 直线驱动新技术及其在加工装备上的应用[J]. 电工技术学报, 2002, 17(5): 45-49.
Zhang Chunliang, Chen Zichen. The new technologies of linear drive and its applications in the processing equipment[J]. Transactions of China Electrotechnical Society, 2002, 17(5): 45-49.
[2]张希, 陈宗祥, 潘俊民, 等. 永磁直线同步电机的固定边界层滑模控制[J]. 中国电机工程学报, 2006,26(22): 115-121.
Zhang Xi, Chen Zongxiang, Pan Junmin, et al. Fixed boundary layer sliding mode control of permanent magnet linear synchronous motor[J]. Proceedings of the CSEE, 2006, 26(22): 115-121.
[3]孙宜标, 杨雪, 夏加宽. 采用鲁棒微分器的永磁直线同步电机二阶滑模控制[J]. 中国电机工程学报,2007, 27(33): 6-10.
Sun Yibiao, Yang Xue, Xia Jiakuan. Second order sliding mode control for PMLSM using robust differentiator[J]. Proceedings of the CSEE, 2007,27(33): 6-10.
[4]赵希梅, 郭庆鼎. 永磁直线同步电动机的变增益零相位H∞鲁棒跟踪控制[J]. 中国电机工程学报, 2005,25(20): 132-136.
Zhao Ximei, Guo Qingding. Variable gain zero phaseH∞robust tracking control for permanent magnet linear synchronous motor[J]. Proceedings of the CSEE, 2005, 25(20): 132-136.
[5]赵希梅, 郭庆鼎. 为提高轮廓加工精度采用 DOB和 ZPETC的直线伺服鲁棒跟踪控制[J]. 电工技术学报, 2006, 21(6): 111-114.
Zhao Ximei, Guo Qingding. Linear servo robust tracking control based on DOB and ZPETC to improve the contour machining precision[J]. Transactions of China Electrotechnical Society, 2006, 21(6): 111-114.
[6]赵娥, 宋保维, 陈海峰. 永磁同步电机负载扰动控制器设计[J]. 弹箭与制导学报, 2007, 27(1): 254-257.
Zhao E, Song Baowei, Chen Haifeng. Design on controller of PMSM with load disturbance[J]. Journal of Projectiles Rockets, Missiles and Guidance, 2007,27(1): 254-257.
[7]郭庆鼎, 等. 直线交流伺服系统的精密控制技术[M].北京:机械工业出版社, 2000.
[8]纪志成, 李三东, 沈艳霞. 自适应积分反步法永磁同步电机伺服控制器的设计[J]. 控制与决策, 2005,20(3): 229-331.
Ji Zhicheng, Li Sandong, Shen Yanxia. Adaptive backstepping design for servo controller of permanent magnet synchronous motor[J]. Control and Decision,2005, 20(3): 229-331.
[9]孙宜标, 杨雪, 夏加宽. 采用鲁棒微分器的永磁直线同步电机二阶滑模控制[J]. 中国电机工程学报,2007, 27(33): 6-10.
Sun Yibiao, Yang Xue, Xia Jiakuan. Second order sliding mode control for PMLSM using robust differentiator[J]. Proceedings of the CSEE, 2007,27(33): 6-10.
[10]Miyazaki T, Ohishi K, Shibutani I. Perfect tracking control based on prediction of reference for high speed optical disc system[C]. Proceedings of the 33rd Annual Conference of the IEEE Industrial Electronics Society, 2007: 345-350.
[11]苏志平. 信号与系统[M]. 北京: 中国水利水电出版社, 2009.
[12]Gradshteyn I S, Ryzhik I M. Routh-hurwitz theorem[M]. San Diego, CA: Academic Press, 2000.
