短路容错控制在多相无轴承永磁同步电机中的可行性分析
2012-09-16王晓琳任新宇邓智泉廖启新
王晓琳 任新宇 邓智泉 廖启新
(1. 南京航空航天大学自动化学院 南京 210016 2.中国人民解放军理工大学理学院 南京 211101)
1 引言
无轴承技术具有无磨损、无污染、长寿命、高转速等优点,因此在航空航天、生命医疗和生物化工等领域具有很好的应用前景,但这些领域由于场合的特殊性,往往要求系统具有高可靠性、免维护的特性,且具备较强的冗余容错功能。另一方面,传统无轴承技术是将磁悬浮绕组与原有转矩绕组一起叠绕在定子槽内,同时实现悬浮与旋转功能[1-4]。然而双绕组的电机结构不仅增加电机及其功率和控制系统的复杂程度,很大程度上降低了整个系统的可靠性,而且当任意一相绕组发生故障时,系统将无法实现容错运行。
研究发现,多相单绕组无轴承永磁电机不仅能够实现稳定的悬浮控制,而且不仅在结构上比双绕组无轴承电机简单,还具有一定的冗余容错性[5-8]。这种电机定子上只有一套多相绕组,通过控制绕组中转矩电流分量和悬浮电流分量可以同时实现转子旋转和悬浮控制。由于每相绕组可独立控制,当某一相或多相绕组出现故障时,系统可以及时切断故障相,并调整相应的控制策略,保证系统在性能允许范围内继续运行,从而提高电机的可靠性。
关于无轴承电机单绕组结构方面,文献[9,10]提出了一种桥式结构:该结构只需要一套功率变换器用于驱动转矩,而悬浮力则由电压电流相对较低的辅助电源产生。但由于结构的特殊性,难以实现系统的容错控制。文献[8,11-13]提出了一种多相无轴承异步电机结构,并采用相应的多相逆变器对其控制。文中还对绕组电感矩阵、悬浮力解析模型以及转子磁场定向等多方面进行了详细深入的分析。除多相无轴承异步电机以外,目前多相无轴承永磁电机也是该研究领域中的一大热点。其中研究内容较为系统的是瑞士学者Bartholet等人,对五种不同电机结构形式及其功率拓扑结构的无轴承永磁同步薄片电机系统进行了对比研究;就功耗、功率变换器规格以及系统成本等多方面分别对两相、三相和四相等多相无轴承永磁电机作了综合分析[14-16]。文献[17]也分别对集中式绕组表贴转子、分布式绕组表贴转子以及分布式绕组交替极转子等结构类型的无轴承永磁薄片电机进行了深入研究。另外,文献[18]对单绕组五相永磁无轴承电机的控制策略进行深入研究:通过控制多相电机的谐波平面空间电压矢量实现了电机平稳悬浮。在多相单绕组无轴承电机容错控制方面,文献[19,20]首先提出无轴承薄片电机的单绕组结构,并通过对各齿线圈电流的反馈控制来补偿悬浮力脉动,为其容错控制奠定了一定基础。文献[8]采用故障前后磁动势相同的思路具体分析了六相无轴承电机和多相正弦、集中整距绕组电机定子缺相时的容错运行策略。文献[21,22]在采用H桥功率系统单独驱动各相绕组的基础上,实现了无轴承永磁薄片电机任意相断路后的自诊断容错运行。文献[23]对无轴承薄片电机绕组短路运行特点及其容错控制方法进行了初步的研究,实现了一相或两相短路故障时的容错控制。但已有文献仅对特定相发生短路故障时进行容错控制,并没有讨论该故障是否存在不可容错性,缺乏对容错控制策略的系统分析及其可行性条件的深入研究。
本文对六相单绕组无轴承永磁薄片电机短路故障下的数学模型进行研究,其中推导了基于矩阵形式的多相电流控制模型,并对短路电流进行了分析。在此基础上,提出以系数矩阵r()θMΛ(详见正文)的非零三阶子式或行秩作为短路故障容错控制的可行性判别依据。根据以上判别方法,文中对该六相电机在任意一相、两相以及三相绕组同时短路等各种具体工况下的容错可控性作了系统分析,并给出了统一的容错控制系统框图。最后分别通过有限元仿真和原理样机进行验证,其结果均验证了上述方案的正确性。
2 短路故障下的数学模型
多相无轴承永磁同步电机N个齿均匀分布在定子圆周上,且每个定子齿上有一相可独立控制的定子绕组。每相电流均由旋转电流和悬浮电流两个分量合成,且可以分别地独立控制。该电机不仅产生旋转磁场驱动电机旋转,而且可以产生可控的磁拉力,从而实现转子的悬浮旋转控制。另外,永磁体采用表贴式结构,且极对数为p。本文以N=6,p=1为例进行分析。
利用等效磁路法和虚位移法,可以得到多相无轴承永磁同步电机关于悬浮力和转矩的数学模型[17-22]

式中Fx,Fy——转子在x和y方向受到的可控悬浮力;
T——转矩;
is——各相定子电流,is=(i1,i2, ⋅⋅⋅,iN)T;
Q= (Fx,Fy,T)T。
系数矩阵M(θr) 与电机结构参数以及转子转角θr有关,为


显然,电机转子的稳定悬浮运行是通过控制各相定子电流实现的。然而,在已知给定悬浮力和转矩的前提下,数学模型(1)中存在未知数(N相电流)个数大于方程数,无法得到绕组电流的唯一解。所以必须在此基础上增加一定的附加约束条件,并构造相应的拉格朗日方程,即可得到此时各相定子电流的给定值[6,7]。因此,功率最优约束下的各相定子电流表达式
L——轴向长度;
μ0——空气相对磁导率;
leg——等效气隙长度;
α——定子齿弧宽;
W——每相绕组匝数;
APM——永磁体磁动势幅值;
θr——转子N极与定子齿1轴线(x轴)的夹角;
θk——定子齿k轴线与齿 1轴线的夹角,

显然,当某相或者多相定子绕组发生短路故障时,故障相绕组中必然存在短路电流且为不可控量,该短路电流亦会对悬浮力与转矩产生影响。因此必须通过重构其他非故障相绕组定子电流,即对式(2)作相应的改变,否则将无法满足电机稳定运行所需要的悬浮力和转矩。
为描述各相的工作状态,定义一个对角矩阵:Λ=diag{λ1,λ2, ⋅⋅⋅,λN},其中λk=1 代表正常绕组相;λk=0代表短路绕组相。那么,短路相定子电流产生的不可控悬浮力与转矩为

式中,( )-IΛ is为短路绕组电流。
因此,为保证转子在故障前后受到的悬浮力和转矩不变,其他正常相绕组电流产生的可控悬浮力与转矩应为总量减去短路绕组产生的不可控量,即

结合式(4)和式(2),可得到短路故障下的正常相绕组电流给定值,从而建立新的电流控制模型

另一方面,由于短路相绕组中的电流难以直接测量,因此有必要通过间接的方式估算出来。易知,短路绕组中的感应电动势分为三部分Ekk、ELk以及Emk组成,分别是由绕组自感、互感以及永磁体对应产生的。首先,在不考虑永磁体的情况下,可得等效磁路,如图1所示。

图1 不考虑永磁体时的等效磁路Fig.1 Equivalent magnetic circuits without the PM


r——转子外圆半径。
则绕组自感为

自感电动势幅值为

对于互感而言,由于结构对称性,通过其他绕组定子齿上的磁通只有主磁通的1/(N-1),因此绕组互感及其感应电动势也只有自感的1/(N-1),即

如果只考虑永磁体部分,且令各正常绕组电流为零,那么某相定子齿上磁通为

显然,绕组上永磁感应电动势幅值为

对比式(8)和式(11),自感电动势幅值与永磁感应电动势幅值之比为

通常情况下,永磁磁动势APM远大于绕组电流磁动势IW,以上比例可近似为零。以本文样机为例,将仿真环节中各参数带入式(12)中,可得自感电动势幅值为永磁电动势幅值的 7%。此外,由于互感电动势只有自感的 1/6,且对于空间位置对称的相绕组而言,其产生的感应电动势在一定程度上可以相互抵消,所以总的互感电动势应远小于自感电动势。因此,本文在分析绕组短路电流时,只考虑永磁磁动势的作用,而忽略自感电动势和互感电动势的影响。
综合以上所述,绕组短路电流表达式为

3 短路容错控制的可行性条件
由于短路故障绕组的位置无法事先预知,因此在任意位置上的一相绕组或任意两相,甚至同时有两相以上绕组都有可能出现短路故障。而每种短路故障状态下是否都能够实现容错控制,也就是式(5)的合理性并没有得到验证,本小节将对此进行分析说明。

根据以上所述,M(θr)Λ系数矩阵是否是行满秩,是多相无轴承永磁同步电机可控电流数学模型是否有解的判别条件。即当且仅当以下等式成立时,可实现该电机在绕组短路故障下的容错控制

显然,Rank(M(θr)Λ) 是否等于 3,不仅与短路相绕组自身的位置(λk=0)有关,而且与转子位置θr有关。
由于系数矩阵M(θr)Λ中各元素含有三角函数,难以利用行列式变换来计算它的秩。本文根据M(θr)Λ中最高阶子式是否全为零来判别其是否为行满秩。下面以六相无轴承永磁同步电机( 6N= )为例进行说明。
易知,当 6N= 时,M(θr)Λ中的最高阶子式为三阶,再根据式(1)中M(θr) 及Λ定义式,简化推导后可以得到M(θr)Λ所有的三阶子式有

从上式可以看出,当 6N= 时,M(θr)Λ中总共有20项三阶子式,其中有2项始终为0,其余项均取决于转角θr和短路相绕组位置λk。
从式(15)中可以看出,当系统发生短路故障时,只需要将其对应的λk=0以及正常相绕组λ=1代入式(15)中,则各项非零子式只含系数f1、f2和f3。虽然f1、f2和f3分别在θr=0 或π、2π/3 或 5π/3以及π/3或 4π/3为 0,但对于相同的θr而言,f1、f2和f3不可能同时为 0。这样一来,式(15)中只要存在两个或两个以上含不同系数f,那么M(θr)Λ中必然存在非零的三阶子式,即该短路故障模式下,可以实现其容错控制。
根据以上分析,将各短路模式下M(θr)Λ的三阶子式以及容错可行性归纳如图2所示。

图2 六相无轴承永磁同步电机短路故障容错可行性Fig.2 Fault-tolerant feasibility of six-phase PM bearingless motors with short-circuited phases
从图2可以看出:无论在无短路绕组的正常状态,还是当任意一相绕组发生短路时,M(θr)Λ中非零三阶子式均存在±f1、±f2和±f3六种形式,由于f1、f2和f3不可能同时为零,所以转子旋转到任意角度时,M(θr)Λ行秩始终都为 3,也就是方程(5)必然存在唯一解。因此在该模式下,能够实现多相无轴承永磁同步电机的悬浮力和转矩控制。
当任意两相绕组发生短路时,情况远比只有任意一相绕组短路复杂。根据图2分析结果,可以将任意两相绕组短路分为三种情况:
(1)相邻两相绕组同时发生短路。利用式(15)或图 2可知,其非零三阶子式仍然存在±f1、±f2和±f3六种形式。因此,分析结论与任意一相绕组短路时一致,也可实现该短路模式下容错控制运行。
(2)相对两相绕组同时发生短路。此时的非零三阶子式分别含有f1、f2和f3中的两项,因此在θr∈[ 0,2π)范围内,始终存在非零项。所以当两相短路绕组是在空间相对位置时,可以根据式(5)得到其余相绕组在正常状态下的可控电流模型。
当任意三相绕组同时发生短路时,M(θr)Λ的三阶子式与相隔两相绕组短路时类似,同样在某些特定转角下,无法得到正常相绕组的可控电流表达式。实际上,在六相无轴承永磁同步电机中,任意三相绕组短路,必然包括两相间隔位置的相绕组。因此,既然两相间隔的短路故障无法实现容错控制,显然任意三相绕组短路时,也同样无法实现其容错控制,而且其电流断续位置也是一一对应的。
总得来说,在六相无轴承永磁同步电机系统中,除了相隔两相绕组或三相及其以上绕组同时发生短路故障时,系统无法实现容错控制以外,其他 15种短路故障模式下(包括6种单相绕组短路故障和9种两相绕组短路故障),均可对剩余正常相的可控电流控制,从而实现悬浮力和转矩的容错控制,其控制系统框图如图3所示。


图3 短路容错控制系统Fig.3 Fault-tolerant control system with short-circuited phases
4 仿真分析
根据以上分析可知,当可容错的短路故障发生后,通过对非故障相电流进行重构,仍能满足原系统悬浮力和转矩控制要求。本文将利用 ANSYS有限元软件对其悬浮力和转矩进行仿真验证。
样机参数为:6齿;定子内径为84mm,外径为149mm,轭部宽度 12mm,定子齿宽/齿高 16mm,40°极靴;转子外径80mm,内径50mm,轴长10mm;1对极表贴式转子,永磁体最厚处2.5 mm,矫顽力780 kA/m,剩余磁感应强度0.965T。
从图4中可以看到,正常模式下,各绕组电流基本正弦,只是初始相位有所不同,而幅值差异不大。为了验证式(13)的合理性,本文在360º~720º区域内同时也给出了绕组1短路后的短路电流有限元仿真结果。可以看出,解析式得到的曲线i1与有限元仿真曲线基本接近,因此在计算短路电流时可以忽略绕组电感的影响,而只考虑永磁体作用,从而验证了短路电流解析式(13)的合理性。从悬浮力和转矩的仿真数据来看,正常模式下悬浮力脉动小于 0.7%,而转矩脉动不超过 0.5%,系统运行稳定。但当发生短路故障后,悬浮力和转矩波动范围大大增加,最大波动范围分别在±12N和±0.1N·m附近。显然,在这种状态下,如果不改变原有控制策略,电机将无法正常工作。

图4 非容错控制模式下的短路故障波形Fig.4 Simulation results with one short-circuited phase under the normal operation mode
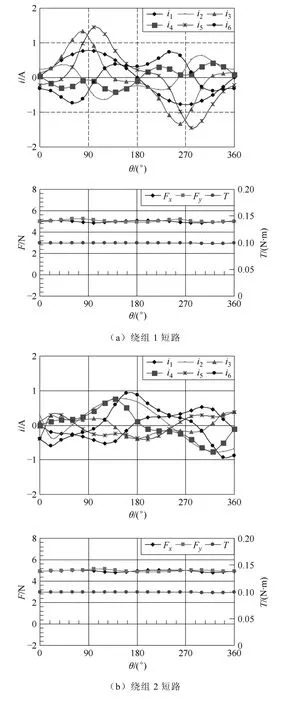

图5 一相绕组短路容错控制时的工作曲线Fig.5 Simulation results with one short-circuited phase under the fault-tolerant control mode
图5给出了当某相绕组发生短路故障时,在容错控制模式下的各相绕组给定电流,以及非故障相和故障相分别产生的悬浮力和转矩。由于篇幅限制以及根据轴对称性的原则,这里只给出了以绕组1、绕组2和绕组3分别发生短路时的变化波形。从图中可以看出,在相应的短路容错控制模式下,电机内产生的总悬浮力和转矩仍然接近期望值,因此能够实现电机的稳定控制。
类似单相绕组短路的仿真方法,图 6给出了相邻两相和相对两相发生短路故障时的电流、悬浮力和转矩曲线。同样由于篇幅限制以及根据轴对称性的原则,图中只给出相邻短路相中的绕组1和绕组2,绕组2和绕组3两种组合;相对短路相中的绕组1和绕组4,绕组2和绕组5两种组合。其他短路相组合的仿真实验与这四种分析结果类似。
为了更好地观测悬浮力和转矩变化情况,图 7给出了各种容错控制模式下的悬浮力和转矩的波动范围。显然,在相同短路相的条件下,两相绕组同时短路时的悬浮力和转矩脉动均大于单相绕组短路时的脉动。另外,由于悬浮力与x和y轴方向相关,因此相对轴线空间位置不同的绕组短路时,脉动也有所不同。而对于转矩而已,不同空间位置的绕组对其贡献相同,因此短路故障后引起的转矩脉动也完全一致。仅考虑非故障相绕组可控电流对悬浮力(Fkx和Fky)和转矩Tk的贡献,以及以上两者合成的悬浮力(Fx和Fy)和转矩T。显然,当短路故障发生后,短路相绕组将产生变化较大的悬浮力和转矩分量,为了补偿其对合成量的影响,正常相绕组产生的可控
悬浮力和转矩也发生相应的变化,从而使得总的输出悬浮力和转矩维持在稳定范围内。值得一提的是,图8e和8f中由于都是空间位置相对的两相同时短路,它们的短路电流产生的悬浮力脉动刚好能够相互抵消,因此其短路相悬浮力分量为零。

图6 两相绕组短路容错控制时的工作曲线Fig.6 Simulation results with two short-circuited phases under the fault-tolerant control mode
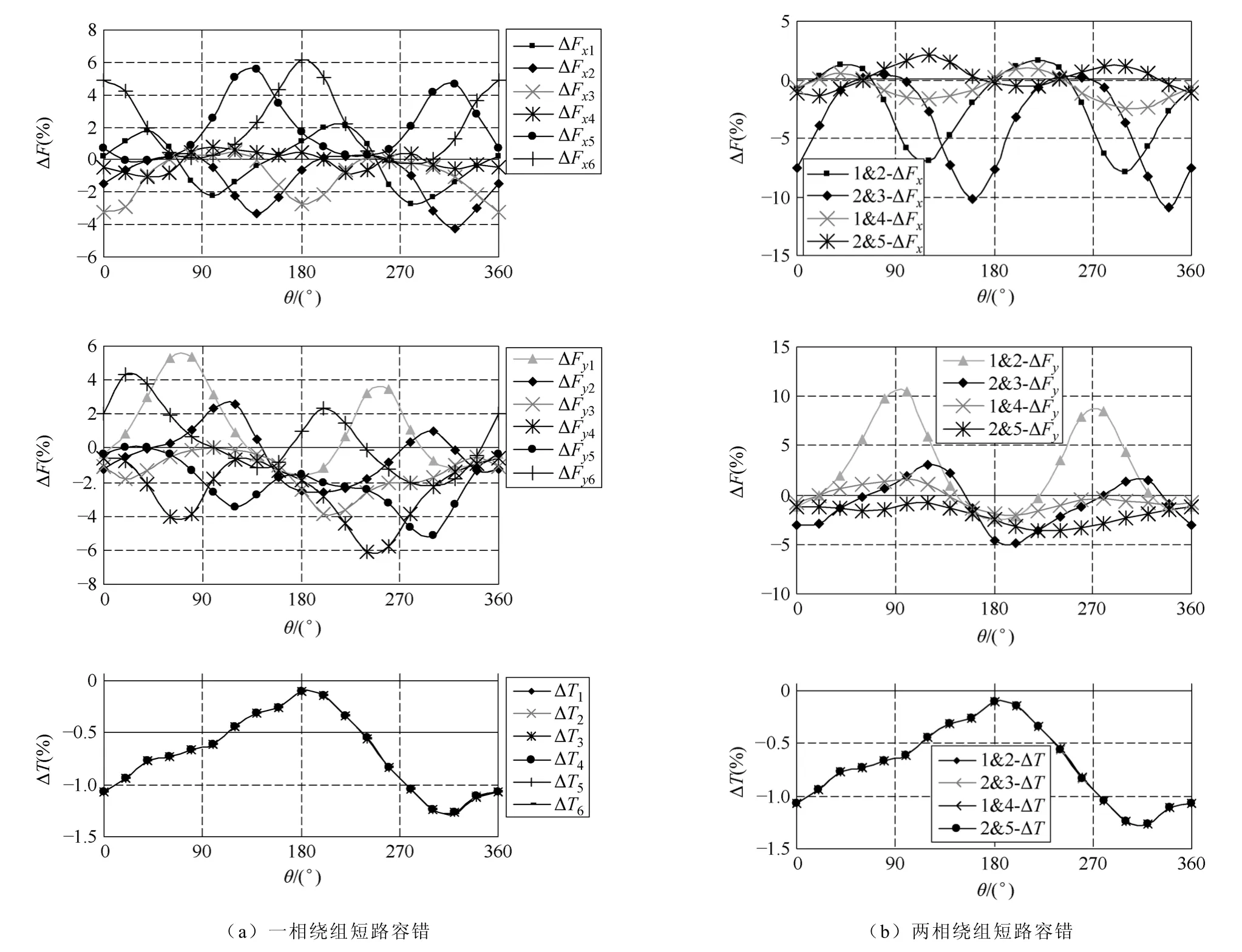
图7 容错控制模式下的悬浮力与转矩脉动范围Fig.7 The force and torque ripples with short-circuited phases under the fault-tolerant control mode
当相隔两相绕组同时发生短路时,仿真情况将与以上各状态均有所不同:图9中非故障相的可控电流在某些转角位置出现了断续现象,因此无法得到相应的悬浮力和转矩。以绕组1和绕组3为例,电流在θr=60º或240º时断续,这与此前理论分析结果一致,即M(θr)Λ在这两个位置时的三阶子式全为零,方程(5)无解。因此,在这种短路故障模式下,无法实现稳定的容错控制。
显然,当有三相绕组同时发生短路故障时,电流断续点增加,同样无法实现悬浮力和转矩的稳定控制。而且,某些三相绕组短路故障下的断续点包括了两种相隔相绕组短路时的断续点。例如,当绕组1、绕组3和绕组5同时发生短路时,绕组电流分别在θr=0º,60º,120º,180º,240º和 300º断续。这恰恰是绕组1和绕组3,绕组3和绕组5以及绕组1和绕组5三种相隔相绕组短路时的断续点,与前面的理论分析也是一致的。
5 实验验证
为验证以上理论分析的正确性,本文在一台六相无轴承永磁薄片电机上进行了实验分析。该实验样机结构参数与上一节仿真中的样机参数一致。另外,相绕组匝数为450匝,导线线径0.71 mm。
实验样机的控制系统采用数字信号处理器(DSP)TMS320F2812,功率系统采用六个独立的 H桥结构,因此可以实现每个绕组的独立控制。由于实验的相似性,本文给出了单相绕组、相邻两相绕组和相对两相绕组中的部分短路情况下的容错控制。


图8 悬浮力与转矩的构成分量Fig.8 The levitation force and torque compositions

图10为绕组1和绕组2分别发生短路时的实验波形。需要特别说明的是:为了避免在短路故障模拟实验过程中损坏功率器件,短路实验时,先将绕组端部与功率管断开后,将其运行在断路故障模式下,然后再将某一相绕组两端短接。这样一来,短路实验在实际操作上变成了断路容错向短路容错切换的过程。由于该断路状态是因模拟实验操作过程导致的,而非真实短路故障时必然出现的,而且文献[21-23]对无轴承永磁电机在断路状态下的容错控制策略进行了详细研究,故本文不再赘述。
从图 10中可以看出,短路故障发生之前,相绕组1电流为零,其他相绕组电流波动范围约为±0.4A,转子径向位移变化范围在±200μm左右。当电机进入短路故障状态后,故障相1中的短路电流变为非可控量,且为幅值在±0.8A左右的正弦曲线。该波形与图4中解析推导、有限元仿真三者基本一致,进一步验证了短路电流模型式(15)的合理性。另一方面,系统在检测到短路故障之前,仍然采用的是断路容错控制模式。因此,在过渡过程中,转子径向位移波动范围明显增大,不过此过渡过程时间较短。系统一旦检测到该短路故障,其他相绕组电流将根据容错控制模型进行相应的调节,各可控相绕组电流明显增大,从而产生所需的悬浮力和转矩,电机很快又重新进入稳定运行状态,且悬浮位移范围约为±300μm。另外,从控制系统框图(见图3)可以看到,各可控相绕组电流不仅受转子位置影响,而且与悬浮力和转矩的给定量有关,而这些给定量又由电机当前的状态所确定,是实时变化的。这与仿真分析时悬浮力与转矩均为固定值有所不同,因此在实验过程中,各相可控电流的波形远不如仿真分析中那样具有很好的正弦性。

图9 无法实现容错控制的短路故障Fig.9 Infeasible fault-tolerant control cases with short-circuited phases

图10 一相绕组短路实验Fig.10 Experimental results with one short-circuited phase
图11中分别是相邻绕组(绕组1和绕组2)和相对绕组(绕组 1和绕组 4)同时处于短路状态时的各变量实验波形。同样由于操作上的原因,两相绕组难以在很短时间内同时从断路状态切换到短路状态。因此本文给的实验运行波形实际上是三个阶段:先是两相绕组断路容错状态,然后过渡到一相断路一相短路的容错控制,最后切换到两相绕组同时短路容错的控制状态。显然,两相绕组同时短路后,转子径向位移波动比单相绕组短路时要大。

图11 一相或两相绕组短路实验Fig.11 Experimental results with two short-circuited phases
图11中在系统最终稳定后,x/y方向位移范围达到了±400μm左右,但仍然存于悬浮状态范围内,即小于单边气隙长度2mm。当然在本样机中为了避免位移波动范围超过气隙长度而导致的定转子直接碰撞(即俗称的转子扫堂现象),转轴上的辅助机械轴承与转轴之间的间隙小于定转子之间的气隙厚度,可有效地起到保护作用。
以上实验表明,对于可容错控制模式下的短路故障,其他非故障相电流也随着控制策略改变而相应变化,能够实现对悬浮力和转矩进行主动控制,在一定程度上补偿了短路相电流对系统造成的影响,从而使系统重新进入稳定运行状态。
6 结论

[1]Salazar A, Chiba A, Fukao A. A review of developments in bearingless motors[C]. The 7th Symposium Magnetic Bearings, 2000.
[2]Amrhein W, Silber S, Nenninger K. Developments on bearing drive technology[C]. The 8th Symposium Magnetic Bearings, 2002.
[3]王凤翔, 郑柒拾, 王宝国. 不同转子结构无轴承电动机的磁悬浮力分析与计算[J]. 电工技术学报,2002, 17(5): 6-9.
Wang Fengxiang, Zheng Qishi, Wang Baoguo.Analysis and calculation of magnetic levitation forces for bearingless motors with different rotor structure[J].Transactions of China Electrotechnical Society, 2002,17(5): 6-9.
[4]邓智泉, 严仰光. 无轴承交流电动机的基本理论和研究现状[J]. 电工技术学报, 2000, 15(2): 29-35.
Deng Zhiquan, Yan Yangguang. The main theory and status quo of AC bearingless motors[J]. Transaction of China Electrotechnical Society, 2000, 15(2): 29-35.
[5]Silber S, Amrhein W, Nenninger K, et al.Performance optimization of a bearingless pump using feedback linearization techniques[C]. The 8th International Symposium on Magnetic Bearings, 2002:379-382.
[6]Silber S, Amrhein W, Bosch P, et al. Design aspects of bearingless slice motors[J]. IEEE ASME Transactions on Mechatronics, 2005, 10(6): 611-617.
[7]朱俊. 单绕组无轴承永磁薄片电机的研究[D]. 南京:南京航空航天大学, 2008.
[8]康敏. 单绕组多相无轴承电机的研究[D]. 杭州: 浙江大学, 2009.
[9]Khoo W. Bridge configured winding for polyphase self-bearing machines[J]. IEEE Transactions on Magnetics, 2005, 41(4): 1289-1295.
[10]Khoo R L F W K S, Garvey S D. AC polyphase self-bearing motors with a bridge configured winding[C]. The 7th International Symposium on Magnetic Bearings, 2002: 47-52.
[11]Huang J, Kang M, Yang J Q. Analysis of a new 5-phase bearingless induction motor[J]. Journal of Zhejiang University: Science A, 2007, 8(8):1311-1319.
[12]黄进, 康敏, 杨家强. 新型单绕组多相无轴承电机[J]. 浙江大学学报(工学版), 2007, 41(11):1850-1856.
Huang Jin, Kang Min, Yang Jiaqiang. Novel bearingless machine with a single set of multiphase windings[J]. Journal of Zhejiang University(Engineering Science), 2007, 41(11): 1850-1856.
[13]Kang M, Huang J, Yang J Q, et al. Analysis and experiment of a 6-phase bearingless induction motor[C]. Proceedings of the 11th International Conference on Electrical Machines and Systems,2008: 990-994.
[14]Bartholet M T, Nussbaumer T, Krahenbuhl D, et al.Modulation concepts for the control of a two-phase bearingless slice motor utilizing three-phase power modules[J]. IEEE Transactions on Industry Applications, 2010, 46(2): 831-840.
[15]Bartholet M T, Silber S, Nussbaumer T, et al.Performance investigation of two-, three- and four-phase bearingless slice motor configurations[C].International Conference on Power Electronics and Drive Systems, 2007: 9-16.
[16]Bartholet M T, Nussbaumer T, Silber S, et al.Comparative evaluation of polyphase bearingless slice motors for fluid-handling applications[J]. IEEE Transactions on Industry Applications, 2009, 45(5):1821-1830.
[17]廖启新. 无轴承永磁薄片电机的研究[D]. 南京: 南京航空航天大学, 2005.
[18]姜海博, 黄进, 康敏. 单绕组五相永磁无轴承电机的 SVPWM 控制[J]. 电工技术学报, 2011, 1(26):34-39.
Jiang Haibo, Huang Jin, Kang Min. SVPWM control for a 5-phase PM bearingless motor with single set of windings[J]. Transactions of China Electrotechnical Society, 2011, 1(26): 34-39.
[19]Silber S, Amrhein W. Power optimal current control scheme for bearingless PM motors[C]. The 7th International Symposium on Magnetic Bearings, 2000:401-406.
[20]Grabner H, Amrhein W, Silber S, et al. Norlinear feedback control of a bearingless brushless DC motor[C]. The 6th International Conference on Power Electronics and Drives Systems(IEEE Industry Applications and Power Electronics Societies), 2005:366-371.
[21]岳盛奏, 王晓琳, 廖启新, 等. 无轴承薄片电机的自诊断容错运行[J]. 电工技术学报, 2010, 25(1):1-6.
Yue Shengzou, Wang Xiaolin, Liao Qixin, et al. Auto diagnosis error tolerant operation of a bearingless slice motor[J]. Transaction of China Electrotechnical Society, 2010, 25(1): 1-6.
[22]岳盛奏, 王晓琳, 邓智泉, 等. 单绕组无轴承永磁薄片电机缺相运行特性分析[J]. 中国电机工程学报,2009, 29(23): 80-86.
Yue Shengzou, Wang Xiaolin, Deng Zhiquan, et al.Operation characteristics analysis of the single winding bearingless PM slice motor at lackingphase[J]. Proceedings of the CSEE, 2009, 29(23):80-86.
[23]王晓琳, 盛旺, 邓智泉, 等. 多相无轴承永磁薄片电机故障运行特性分析[J]. 中国电机工程学报,2011, 31(18): 73-78.
Wang Xiaolin, Sheng Wang, Deng Zhiquan, et al.Operating characteristics analysis of multi-phase bearingless permanent magnet slice motors with faulty phases[J]. Proceedings of the CSEE, 2011,31(18): 73-78.
[24]Ooshima M, Chiba A, Fukao T, et al. Design and analysis of permanent magnet-type bearingless motors[J]. IEEE Transactions on Industrial Electronics, 1996, 43(2): 292-299.
