基于多模式SVPWM算法的永磁同步牵引电机弱磁控制策略
2012-09-16何亚屏文宇良许峻峰冯江华
何亚屏 文宇良 许峻峰 冯江华
(株洲南车时代电气技术中心 株洲 412001)
1 引言
近年来,永磁同步电机以其优异性能受到轨道交通牵引系统研发人员的高度重视[1-6]。弱磁控制系统具有较宽的调速范围,能使永磁同步牵引电机在高速时输出恒定功率,且较强的弱磁能力在保持牵引系统性能指标不变的前提下降低电机的最大功率,从而降低逆变器的容量。因此,对永磁同步牵引电机进行弱磁控制,对提高轨道交通永磁同步牵引系统性能有着重要而现实的意义。
以往永磁同步电机弱磁系统中[7-9],国内外学者多数使用简单的异步SVPWM线性调制方式,而面对轨道牵引中的大功率逆变器低开关频率的复杂工况,以往调制方式在中高频段,容易使弱磁控制系统电流产生畸变,引发大的转矩脉动,难以保证系统具有良好的控制性能;大量实验后发现,中高频段采用同步调制方式[10]能使系统输出电流对称,转矩平稳,从而保证轨道牵引弱磁控制具有优异的控制性能。因此在轨道交通永磁同步牵引系统中实现多模式SVPWM算法具有必要性和紧迫性。
本文简单介绍弱磁控制策略基本原理,及多模式SVPWM算法的基础理论,并将两者紧密结合,提出了基于多模式SVPWM算法的永磁同步牵引电机的弱磁控制策略,通过Matlab仿真平台和地面试验平台验证了方法的有效性。
2 永磁同步电机数学模型
本文采用永磁同步电动机在 dq同步旋转坐标系下的数学模型,电压方程和磁链方程可表示为
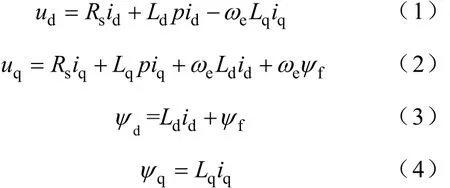
式中id,iq——定子电流在d轴和q轴上的分量;
ud,uq——定子电压在d轴和q轴上的分量;
ψd,ψq——定子磁链在d轴和q轴上的分量;
Ld,Lq——直轴同步电感和交轴同步电感;
ωe——电机电角速度,且ωe=npωr;
np——电机极对数;
ωr——电机机械角速度;

3 永磁同步电机弱磁控制策略
永磁同步电机转子由永磁体组成,因此,励磁磁动势是由恒定永磁体产生而无法调节,当定子电压等于最大逆变器容量时,要想继续升高转速只有靠调节交直轴电流来实现,增加电机直轴去磁电流分量来减弱气隙合成磁场,从而维持电压平衡关系,获得弱磁效果。
3.1 弱磁控制基本原理
3.1.1 电流极限圆和电压极限椭圆
永磁同步电机稳态运行时,端电压us和定子电流is都要受到限制,不能超出极限值Usmax和Ismax,即需要满足以下约束条件




图1 弱磁控制时电压电流极限示意图Fig.1 The voltge and current limit figure of the flux weakening control
3.1.2 永磁同步电机的弱磁原理

ψs减少,即Ldid+ψf和Lqiq也相应的减少,使用最大转矩电流比控制,将电流角控制在第二象限[11],即id为负值,iq为正值,如果负向增加id,Ldid+ψf分量减少,同时,受到电流极限圆的限制,iq相应的正向减少,Lqiq分量也减少,使得ψs减少,达到弱磁升速目的,因此,弱磁控制基本原理是适当调整d轴和q轴电流在定子电压受限状态下分配关系,如图2所示。

图2 弱磁过程中交直轴电流变化关系图Fig.2 The current ralation in the flux weankening control
3.2 基于电压闭环的永磁同步电机弱磁控制策略

图3 永磁同步电机弱磁控制框图Fig.3 The flux weakening control block of PMSM
图3所示的弱磁控制系统中,Part I用来实现恒转矩区的最大转矩电流比控制。弱磁控制策略由图中Part II和Part III部分组成,主要思想是利用同步PI电流调节器的输出参考电压来确定弱磁控制的开通时刻,使用电压PI来调节弱磁电流大小。

4 多模式SVPWM算法
在轨道牵引系统中大功率传动系统开关器件的开关频率较低(350~500Hz),由于永磁同步电机的极数较多,定子供电频率通常要做到300Hz左右,甚至更高,因此要在SVPWM的整个调制范围内为保证永磁同步牵引电机有较好的输出电流波形和较好的转矩特性,单纯的SVPWM异步调制模式无法满足性能要求,必须应用多种调制模式,即低频段采用异步调制模式,使磁链轨迹尽量逼近理想圆;在中高频段采用分段同步调制充分保证电流波形的三相对称性、二分子一对称和四分子一对称,本文主要介绍中高频段采用分段同步调制。
4.1 SVPWM原理
SVPWM 是将逆变器和电机看成一个整体,着眼于使电机获得圆形磁通。对于三相两电平 PWM逆变器可产生8种开关状态,其中6个有效电压矢量U1(100),U2(110),U3(010),U4(011),U5(001),U6(101)以及两个零电压矢量U7(111),U0(000),如图4所示。

图4 电压空间矢量图Fig.4 The space vectors of voltage
在一个计算周期tc内,根据伏秒平衡原则,参考电压近似认为不变,是通过与之相邻两个基本电压空间矢量线性组合而成,以第一扇区为例,则有

式中,t1,t2,t0分别为相邻有效电压和零矢量作用时间,化简得


θ——参考电压矢量与所在扇区第一个有效电压矢量的夹角;——参考电压幅值;
Udc——中间直流电压。
4.2 分段同步调制算法
如果参考电压矢量在空间矢量复平面上的位置恒定且均匀分布,且参考电压矢量以恒定的电角度运动,则这种参考矢量合成的结果为同步调制,在中高频率段,同步调制可以保证三相输出的对称性,消除寄生谐波,有效抑制转矩脉动。目前同步调制的方法有以下四种[10]:传统空间电压矢量方法(Conventional Space Vector Strategy, CSVS),基本矢量钳位策略(Basic Bus Clamping Strategy, BBCS),边界电压矢量策略(Boundary Sampling Strategy,BSS)和不对称零矢量变换策略(Asymmetric Zero-Changing Strategy, AZCS)。用以下四个方面来描述所有同步调制算法的基本原则:
(1)每个周期内电压矢量的个数。
(2)每个周期内电压矢量的位置。
(3)有效边电压和零电压矢量拟合电压矢量的作用时间。
(4)有效边电压和零电压的拟合电压矢量次序。
4.3 同步调制的实现
本文选用BBCS策略,其基本原则为:分频数(脉冲个数)P与每个扇区电压矢量个数N之间关系为:P=3N或P=2N+1;开关拟合方式每个扇区相同,每个扇区的中间电压矢量拟合时,前后必须是零矢量以充分保证波形的三相,半波,四分之一对称。
本文将同步调制区分成三段,即9,5,3分频,在此仅以 9分频为例。9分频同步调制中,每个扇区电压个数为3,总电压矢量个数为18个,每两个电压矢量相差π/9;一个圆内电压矢量分布如图5所示。
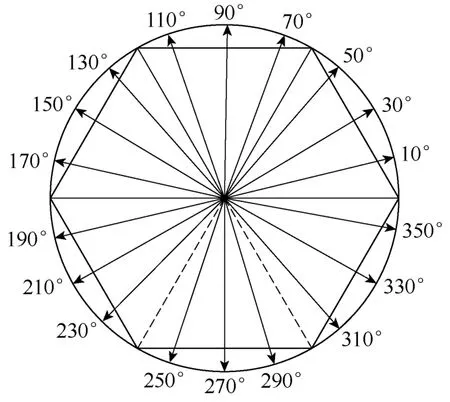
图5 9分频电压矢量位置图Fig.5 The vector position of nine frequency dividing
以第一扇区为例,其开关拟合方式为:
其拟合电压矢量的有效电压矢量和零矢量的作用时间依据方程(12)~(14)计算,其他扇区类似,根据这种拟合方式,9分频得到的相调制脉冲波形如图6所示。
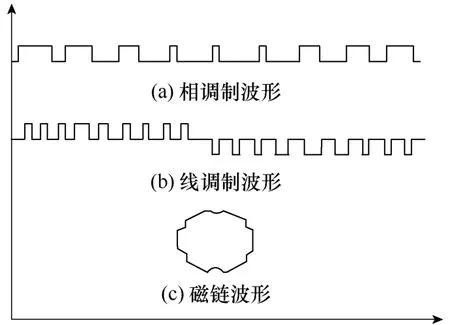
图6 9分频调制脉冲波形Fig.6 The pulse waveforms of nine frequency dividing
4.4 不同调制模式的切换
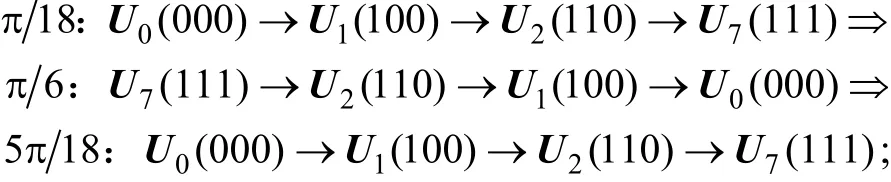
切换是多模式SVPWM算法的一个关键问题,不同调制模式下,有效基波信息不完全相同。切换发生时,由于基波幅值和相位突变,会出现波形冲击振荡,电压电流突变和谐波剧增的情况,如果不适当处理会使牵引电机产生较大的脉动和较强的噪声,容易引起过电流,减少电机使用寿命。一般保持不同调制模式相同的矢量拟合方式和适当的调节切换前后电压调制比,使切换前后电压基波信息基本匹配,避免产生上述的突变情况;同时选择合适的频率切换点和切换时刻也是不同模式切换的关键。频率切换点选择旨在充分利用开关频率,其开关切换点如图7所示;切换时刻旨在维持电压空间矢量的连续性,一般选择在前调制模式最后一个矢量结束,后一个调制模式第一个矢量刚开始时进行。

图7 不同模式之间的切换图Fig.7 Switch of different modes
5 基于多模式SVPWM的永磁同步牵引电机弱磁控制策略
将多模式空间电压矢量(SVPWM)技术应用到永磁同步电机弱磁控制当中,控制框图如图8所示。基本工作原理如下,给定转矩与反馈转矩通过PI调节得到q轴电流,通过最大转矩比电流得到d轴电流,经过弱磁模块,将得到的交直轴电流作为电流给定,与电机反馈的交直轴电流经过电压PI,以及Park反变换得到多模式调制所需的正弦电压信号。

图8 新型基于多模式SVPWM算法永磁同步电机弱磁控制框图Fig.8 The new flux weakening control block of PMSM base on the multi-SVPWM
6 仿真分析与试验结果
6.1 仿真实现
使用Matlab 2009搭建系统仿真平台,开关频率选取 500Hz,以大功率永磁同步牵引电机作为仿真试验对象,整个仿真系统的采样时间为Ts=40μs,且在不同的调制模式下,PI参数取不同的值,仿真结果如下图所示(由于三相电流之和为 0,仿真图只取二相电流观测)。
图9是500Hz低开关频率异步调制时的永磁电机输出波形,图 9a表示 600r/min时的电流波形和线电压波形,电流波形比较美观,半波,三相对称性好;由线电压波形看出,周期内脉冲个数较多。图9b是在转速为1250r/min时异步调制的电流和线电压波形,电流波形尖峰明显,三相不对称,上下波形不对称,有明显波动;而由线电压看出周期脉冲个数少,且脉冲频谱不连续,上下脉冲个数不一样,因此,中高转速时异步调制导致输出电流波形谐波含量多,且三相不平衡,影响控制系统的性能。

图9 异步调制永磁同步电机输出波形Fig.9 The waveforms of asynchronism modulation
图 10是同步调制 9分频时的永磁电机输出波形,此时电机转速为 850r/min,电流波形尖峰少,波形美观,三相对称性好,半波对称好;线电压上下脉冲个数一致,且上下波形对称性好。

图10 9分频永磁同步电机输出波形Fig.10 The waveforms of 9 frequency dividing
图 11是同步调制 5分频时的永磁电机输出波形,此时电机转速为 1 250r/min,电流波形美观,三相对称性好,半波对称好,四分之一对称性好;线电压波形,上下脉冲个数都为5个,且上下波形对称性好。与图9b对比,可以看出,同步调制时,相电流波形美观,对称性好,谐波分量少,线电压波形,上下对称性好,因此,同步调制在中高速时能更好的保证系统的性能。

图11 5分频永磁同步电机输出波形Fig.11 The waveforms of 5 frequency dividing
图 12是同步调制 3分频时的永磁电机输出波形,此时电机转速为 2 000r/min,电流波形美观,三相对称性好,半波对称好;线电压波形,周期对称性好,上下脉冲个数一致,且上下波形对称性好。

图12 3分频永磁同步电机输出波形Fig.12 The waveforms of 3 frequency dividing
图13是同步调制3分频时永磁同步电机弱磁控制输出波形图,图13a是弱磁稳定后的3分频的相电流和脉冲波形图,d,q轴电流波形图,线电压每个周期为3个脉波,且波形美观对称,相电流随脉冲个数规律性变化,电流波形基本上三相对称,半波对称,且无明显电流尖峰。当弱磁开始后,d轴电流负向增加,q轴电流正向减小,虚线为交直轴电流给定值,由图可知,整个弱磁过程中,反馈值能很好的跟踪实际值;图13b为电流圆波形,在未发生弱磁时候电流稳定在A点,即最大转矩点,当发生弱磁后,电机d轴电流负向增加,q轴电流减少,达到B点,从组图可以看出,实际弱磁过程与理论分析基本一致。

图13 3分频永磁同步电机弱磁输出Fig.13 The waveforms of 3 frequency dividing with flux weankening control of PMSM
仿真结果表明了基于多模式SVPWM算法的永磁同步电机弱磁控制在整个调速范围内具有良好的输出特性,能充分利用直流母线电压,三相电流波形,线电压波形对称美观,谐波分量小,尖峰几乎不存在,能保证系统具有优异控制系能。
6.2 试验结果
对上述弱磁控制技术和多模式空间电压矢量调制算法进行DSP程序编写,将程序应用在永磁同步电机牵引系统的地面试验台上,其试验结果如下。
图 14为永磁同步电机地面试验台上的实验结果图,图14a为异步和9分频以及过渡的波形,异步和9分频的d,q电流反馈值都能很好的跟踪实际值;相电流波形美观且对称性好,不存在明显尖峰,与仿真图基本相似,两者波形形状基本相似,且转矩不存在脉动,过渡比较平滑,不存在转矩跳边以及电流冲击;图14b为9分频和5分频以及过渡的波形,图14c为5分频和3分频以及过渡的波形,两组曲线都过渡平滑,过渡点转矩脉动小,对比仿真图10~图12,试验和仿真波形形状基本相似。

图14 地面实验结果CH1,CH2—Iu,Iv相电流波形 CH3,CH4—交轴电流的给定与反馈值 CH5,CH6—直轴电流的给定与反馈值 CH7—实际转矩值Fig.14 The result of the ground experiment
由试验和仿真图可以看出,本文方案在全频率范围内,能充分利用开关频率,输出电流对称美观,无明显尖峰,谐波含量少,输出转矩脉动小,各模式之间能平稳切换。因此,仿真和试验上都有效的验证了本文方案的正确性。
7 结论
本文将多模式SVPWM调制算法和永磁同步电机弱磁控制相结合,提出基于多模式SVPWM算法的新型永磁同步牵引电机弱磁控制方案,通过Matlab搭建仿真平台和地面试验台进行了验证。从结果对比中可以看出,本文提出的方案,能够实现在全速范围内的调速,且在各个SVPWM调制模式下,系统都具有优异的控制性能,弱磁过程能很好的实现且具有良好的动静态性能。本文提出方案为轨道永磁同步牵引系统的设计提供了参考,对推动我国轨道交通永磁同步牵引系统的发展具有积极的意义。
[1]Jerry Greenberg. Are permanent magnet drilling motors the next generation[J]. Drilling Contractor,2008(5): 40-66.
[2]Keiichiro Kondo, Minoru Kondo. Design of the permeters of permanet magnet synchronous motors for railway vehicle traction[C]. Proceedings of the Fifth International Conference on Power Electronics and Drive System of IEEE Industrial Electronics Society, 2003: 992-997.
[3]Klockow T, et al. Traction motors with permanet magnet material[J]. Converter Technology & Electric Traction, 2003, (4): 37-39, 44.
[4]Koji Yoshida, et al. Permanent magnet synchronous motors applied in railway traction system[J].Converter Technology & Electic Traction, 2003(1):1-5.
[5]郭晓燕, 张黎. 永磁同步电机在铁道牵引领域中的应用[J]. 铁道机车车辆, 2005, 25(10): 61-65.
Guo Xiaoyan, Zhang Li. Application of permanent magnet synchronous motor to driving railway vehicle[J]. Railway Locomotive & Car, 2005, 25(10):61-65.
[6]许峻峰, 李耘茏, 许建平. 永磁同步电机作为机车牵引电机的应用现状及前景[J]. 铁道学报, 2005,27(2): 50-52.
Xu Junfeng, Li Yunlong, Xu Jianping. Present situation and perspect of applying permanent magnet syncharonous motors to railway locomotives[J].Journal of the China Railway Society, 2005, 27(2):50-52.
[7]冯江华,桂卫华,许峻峰. 考虑参数变化的永磁同步电动机弱磁控制研究[J]. 微电机, 2008, 41(4):20-31.
Feng Jianghua, Gui Weihua, Xu Junfeng. Fluxweakening control research of permanent magnet synchronous machines considering parameters variation[J]. Micromotor, 2008, 41(4): 20-31.
[8]程秋良,朱熀秋. 无轴承永磁同步电机增磁调压转速控制策略[J]. 中国电机工程学报, 2009, 29(3):91-95.
Cheng Qiuliang, Zhu Huangqiu. Speed control strategy of bearingless PMSM by means of voltageregulating under flux enhancing operation[J].Proceedings of the CSEE, 2009, 29(3): 91-95.
[9]窦汝振,温旭辉. 永磁同步电机直接转矩控制的弱磁运行分析[J]. 中国电机工程学报, 2005, 25(12):117-121.
Dou Ruzhen, Wen Xuhui. Analysis of field weakening operation for the direct torque control of PMSM[J].Proceedings of the CSEE, 2005, 25(12): 117-121.
[10]Holtz J. Pulsewidth modulation-a survey[J]. IEEE Transactions on Industrial Electronics, 1992, 39(5):410-420.
[11]李长红,陈明俊,吴小役. PMSM 调速系统中最大转矩电流比控制方法的研究[J]. 中国电机工程学报,2005, 25(21): 169-174.
Li Changhong, Chen Mingjun, Wu Xiaoyi. Study of a maximum ratio of torque to current control method for PMSM[J]. Proceedings of the CSEE, 2005, 25(21):169-174.
