基于参数辨识的PMSM电流环在线自适应控制方法
2012-09-16杨立永张云龙陈智刚李正熙
杨立永 张云龙 陈智刚 李正熙
(北方工业大学变频技术北京市工程研究中心 北京 100144)
1 引言
目前,矢量控制技术使永磁同步电机(PMSM)越来越广泛地进入到高性能工业或军事应用领域中。矢量控制技术一般使用PI或者PID作为电流控制器,在矢量控制系统中,电流环是调速系统中响应最快的一环,其控制器参数的优劣将直接影响到整个调速系统的性能,而根据经典控制理论方法可知,对电流控制器参数影响最为直接的便是电机的定子电阻和电感[1]。电机的电阻和永磁体供磁能力会因为温度的变化而发生变化[2,3];d-q轴电感值会因不同运行条件下电流变化所引起的不同程度磁饱和而发生变化[4,5],这些参数的变化将导致电流控制器PI参数与实际运行条件不匹配,导致系统性能明显下降[6]。因此,对电机参数进行准确的辨识将直接决定电流控制器控制性能的好坏,进而影响到整个系统的性能。
本文利用带遗忘因子的递推最小二乘法对电机的定子电阻、永磁体磁链以及电感等参数分别进行在线辨识,然后利用得到的参数辨识值代入提前计算好的PI参数计算式,对PI参数进行实时整定,以解决电机运行条件变化时 PI控制器参数与电机参数不匹配问题。下面将逐一介绍本方法各部分。
2 永磁同步电动机的数学模型
在忽略谐波、涡流和磁滞损耗的前提下,永磁同步电动机d-q轴坐标系数学模型如下[7]:

式中,ψq=Lqiq;ψd=Ldid+ψf。
其稳态数学模型为

式中uq,ud——定子电压矢量的q轴、d轴分量;
iq,id——定子电流矢量的q轴、d轴分量;
Rs——定子电阻;
p——微分算子;
ψd,ψq——定子的d-q轴磁链;
ψf——永磁体转子产生的磁链;
ωe——电动机电角速度;
Ld,Lq——电机定子绕组d-q轴电感。
3 电流控制器PI参数设计
永磁同步电动机的矢量控制系统中,电流内环一般只与 PWM逆变器和电机的参数有关,不受外部负载变化的影响,所以电流环有其固定的结构,电流环的参数可以按一定方法计算得到[8]。
在电动机调速系统中,系统的电磁时间常数远小于机电时间常数,转速的变化往往比电流变化慢得多。因此,与转速相关的反电动势项在电流的瞬变过程中相当于一个变化较慢的扰动,在设计电流环时可以将这个扰动看作是常数项,使用PI调节器可以消除这个常数扰动造成的静差。所以电流环PI参数设计过程中可以暂不考虑反电动势项的影响。
故一般情况下,永磁同步电动机矢量控制电流环结构如图1所示。

图1 电流环控制结构图Fig.1 Current loop control diagram
图1中idqref与udqref分别为dq轴给定电流和电压。PWM逆变器可以看成具有时间常数Ts(Ts=1/fs,fs为逆变器开关管的工作频率)的一阶惯性环节。电机的电枢回路有电阻R、电感L,也可以看成一阶惯性环节。TL是电感时间常数(等于L/R,此处L,R为电机的电感和电阻,对永磁同步电机来说是电机定子电阻和电感,即Ldq/Rs)。KPWM表示逆变器的放大倍数;Tif是电流反馈通道的滤波时间常数,Kif为电流反馈的放大倍数,Kpu为标幺值。电流环开环传递函数为

一般情况下,电机的电磁时间常数远大于Ts和Tif,选择电流调节器的零点抵消被控对象的大时间常数极点,积分时间常数τc=TL=L/R,可得

用一个时间常数Tsf的一阶环节来近似代替Ts和Tif,可得

该系统所对应的电流闭环传递函数可以被认为是典型的二阶系统

由西门子“最佳整定”方法“模最佳系统”的参数关系可知KTsf=0.5,即

得到PI调节器的比例系数为


然后再将其按增量式PI调节器算法数字化,可得其积分系数为
积分时间常数为

本文中,带“^”的参数为辨识值。上述推导说明电流环 PI参数值与电机的电感和定子电阻相关,因此可知,在运行条件发生变化时,只要对电机参数进行实时辨识,就能够得到电机实时运行条件下的PI参数值。
4 PMSM参数的辨识
4.1 带遗忘因子的最小二乘法
系统模型的最小二乘格式为[9]

式中y(k)——系统输出序列;
φT(k)——系统输入序列;
θ——待辨识的参数序列。
递推最小二乘算法,就是当被辨识系统在运行时,每获得一次新的观测数据就修正一次参数估计值,这样随着时间的推移,新观测数据一次次地引入,便能获得满意的辨识结果。同时为了防止数据递推的饱和,算法失去修正能力,引入了遗忘因子,使旧数据的作用得以不断衰减。
带遗忘因子的最小二乘估计递推算法表达式如下:

在基于递推最小二乘算法的电机参数辨识中,算法实现的关键在于如何得到以待辨识参数为未知矢量的线性方程。下面,借助于式(2)研究如何在d-q旋转坐标系下获得最小二乘格式的电机模型。
4.2 电感的在线估计
因为 d-q轴电感是需要辨识的量值,因此将式(2)中电感与其相关项移至一侧,得到

变换成矩阵形式所得到的就是永磁同步电动机的最小二乘格式数学模型


从式(15)可以看出电感的辨识需要参数Rs和ψf,而且这两个参数也是随温度变化的。因此需要另外的算法去单独辨识这两个参数。
4.3 定子电阻和永磁体磁链的在线辨识
在电动机运行过程中,由于电机定子电阻的功耗、轴摩擦等诸多因素影响,电机的内部温度是在不断上升的。温度变化对定子电阻和永磁体供磁能力有较大的影响,尤其是当工作温度和室温温差较大时,这个影响就变得非常明显。因此,很有必要对这两个参数进行实时辨识。参照式(14)和式(15),现将式(2)变形为如下矩阵形式

式中

式(16)和式(17)即为辨识定子电阻Rs和永磁体磁链ψf的最小二乘格式数学模型。其中待辨识参数矩阵中的Ld、Lq是不会在 PI参数的计算中使用的,它们的引入是为了促成定子电阻和永磁体磁链的最小二乘格式以及增加算法的稳定性,而且在随后的实验中发现在Rs和ψf辨识结果相对准确的情况下,其结果存在较大误差。
另外系统输入输出矩阵都是二维矩阵,但是待辨识参数矩阵含有四个参数。为了让辨识结果收敛,本算法需要电机至少两个不同运行点的参数,因此必须在系统的d轴上加入适当的扰动。这些扰动应该是低频低幅值的,尽量减少对电机转矩的影响。
4.4 辨识算法的DSP程序实现
本实验中使用的DSP是TI公司的TMS320F28335,这款 DSP的浮点运算已经避免了定点运算量化误差对辨识结果产生的严重影响,并且使运算简化很多,但是最小二乘法的实现过程仍需要大量的矩阵运算,这就给DSP带来了巨大的运算压力。
如何优化程序就成为辨识算法能否实现至关重要的一个环节。由式(15)可知φ(k) 和φT(k) 都是2×2矩阵,由此可知P矩阵也是一个2×2矩阵。对于2×2矩阵,通过式(18)进行取逆运算是一个简单的过程,这大大缩减了 DSP的计算量,为式(15)的电感辨识算法实现带来了很大方便。

另外在实际的系统中,温度的变化都是缓慢的,即Rs和ψf的变化也十分缓慢。相对于瞬时的电流变化来说,这两个参数可以视为常数。因此对于Rs和ψf的辨识算法,可将其分为多个部分,使用Switch-Case语句分别在中断中执行,这样就能减少DSP每次中断的计算量。整个在线辨识程序流程框图如图2所示。

图2 辨识程序流程框图Fig.2 Program flow chart of identification part
在得到电感和定子电阻的辨识值后,将其代入到式(8)和式(10)中即可得到电流环PI参数值。现在可以得出系统整体框图如图3所示。
5 实验结果
本实验采用的功率模块为三菱公司的 PS21267—AP。PWM频率与采样频率均为3kHz,电机型号为GK6052—6AC31,其铭牌参数如下:额定电压:220V;额定转速:2000r/min;额定电流:3A;静转矩3N·m;转动惯量:3kg·m2。

图3 系统整体框图Fig.3 Overall system block diagram
采用离线辨识方法[10-11]得到的电机其他参数为:ψf=0.242Wb,Ld=8mH,Lq=8.2mH,Rs=2.25Ω。
为了便于观察,将系统空载稳定运行过程中两个算法的在线辨识结果保存到数组中,然后利用Matlab将数据重新呈现于下列图中。
图4是式(17)所对应算法的辨识结果,这一部分辨识了四个参数:Rs、ψf、Ld和Lq。图4中,各分图的上半部分是各个参数的整体收敛趋势,下半部分是将纵坐标轴拉开后的收敛图。可以清楚地看到电阻和永磁体磁链的辨识结果与离线辨识结果基本一致,但是电感的收敛结果不是很准确。另外,由于程序中将本部分算法分为4部分分别在程序中断中执行,所以其收敛速度比较慢。
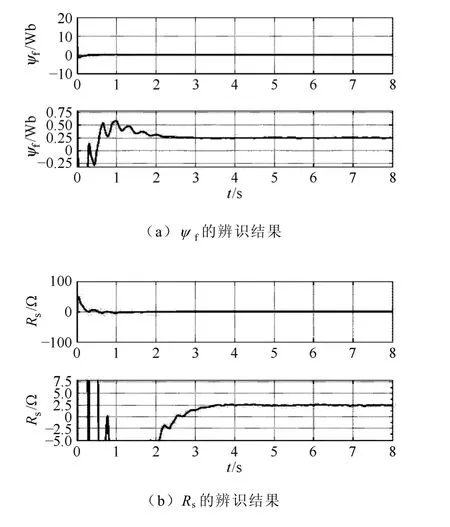

图4 式(17)程序的辨识结果Fig.4 Identification results from Equ.(17)

图5 式(15)程序中电感的收敛过程Fig.5 The convergence process of inductance in the algorithm from Equ.(15)
在空载调试好PI参数的情况下,本文方法和传统方法没什么区别,但是当运行条件变化后,PI参数与实际运行条件不匹配的情况就显现出来。图 6所示为室温下,设定转速为900r/min时,不断调整电机的电流所得到的PI参数变化情况。电感随电流的增加有下降的趋势[12,13],从式(8)和式(9)可知相应的PI参数值会有一定的变化。
图7为上述实验中采用本文所表述方法的q轴电流阶跃变化的波形,其中ia为电机U相电流。图8为传统方法在相同条件下的阶跃变化波形。实验中,随着电流的增加,实际PI参数值中的比例系数应该减小,积分系数应该变大,但传统的方法 PI参数值没有变化,相对来说就是比例系数Kp偏大,等效为系统阻尼比变小,就导致电流的阶跃响应上升时间变快,超调变大,产生了轻微的振荡。

图6 不同运行情况下PI参数的变化情况Fig.6 The changes of PI parameters under different operating conditions

图7 本文算法电流阶跃波形Fig.7 Step waveform of current algorithm

图8 传统算法的阶跃响应Fig.8 Step waveform of traditional algorithm
6 结论
本文分析了永磁同步电机矢量控制系统中电流环结构并得到电流环PI参数值计算表达式,在此基础上利用带遗忘因子的递推最小二乘法在线辨识出的电机参数实现了对系统电流环 PI参数的实时更新。实验结果表明,通过本方法对电流环PI参数进行实时调整,能够有效解决系统因电机参数发生变化而导致的系统性能下降问题。
[1]Antonio Visioli. Practical PID control[M]. London:Springer, 2006.
[2]唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 1997.
[3]Wilson S D, Stewart P, Taylor B P. Methods of resistance estimation in permanent magnet synchronous motors for real-time thermal management[J]. IEEE Transactions on Energy Conversion, 2010, 25(3):698-707.
[4]Tilak Gopalarathnam, Roy Mc Cann. Saturation and armature reaction effects in surface-mount PMAC motors[C]. IEEE International Conference on Electric Machines and Drives, 2001: 618-621.
[5]Shigeo Morimoto, Tomohiro Ueno, Masayuki Sanada.Effects and compensation of magnetic saturation in permanent magnet synchronous motor drives[C].IEEE Conference Record of the Society Annual Meeting on Industry Application, 1993,1: 59-64.
[6]Nicola Bianchi, Thomas M Jahns. Design, analysis,and control of interior PM synchronous machine[M].Padova(Padua), Italy: CLEUP, 2004.
[7]李崇坚. 交流同步电机调速系统[M]. 北京: 科学出版社, 2006.
[8]陈伯时. 电力拖动自动控制系统[M]. 北京: 机械工业出版社, 2003.
[9]李鹏波, 胡德文. 系统辨识基础[M]. 北京: 中国水利水电出版社, 2006.
[10]Zentai A, Daboczi. Offline parameter estimation of permanent magnet synchronous machines by means of LS optimization[J]. International Symposium on System Integration, 2008: 36-41.
[11]柳晶. 变频空调永磁同步电机的参数辨识[D]. 哈尔滨: 哈尔滨工业大学, 2010.
[12]冯江华, 桂卫华, 许峻峰. 考虑参数变化的永磁同步电动机弱磁控制研究[J]. 微电机, 2008, 41(4):28-31.
Feng Jianghua, Gui Weihua, Xu Junfeng. Flux-weakening control research of permanent magnet synchronous machines considering parameters variation[J]. Micromotors, 2008,41(4): 28-31.
[13]Mellor P H, Chaaban F B. Estimation of parameters and performance of rare-earth permanent magnet motors avoiding measurement of load angle[J]. IEE Proceedings-B on Electric Power Applications, 1991,138(6): 60-66
