一种大惯量负载力矩电机驱动器设计
2012-09-11韦景葵
韦景葵
(西北工业大学自动化学院,西安 710129)
1 引言
大惯性负载是指电机负载的转动惯量较大。在工程实践中遇到大惯量负载(飞轮),在直流力矩电机驱动下,制动力矩难以使负载制动停止或换向,制动过程中的回馈电能在供电母线上产生较大泵升电压,容易出现烧毁功率管的问题。大惯量负载在制动或转向控制时,由于惯性较大,电机容易进入发电机状态,向驱动器回馈电能。大惯性负载较一般负载对驱动器处理回馈电能的能力要求更高,对电机的转速控制和制动控制更为困难。一般的电机驱动电路前端采用二极管进行整流,驱动器采用PWM波对电机的输入电压大小进行控制,来控制电机的转速,没有电能的回馈电路,后端电流无法向电网回馈。在工程实践中,当电机由制动状态进入发电状态时,在整流桥电容两端,电压会出现泵升,泵升电压过高会导致电路的电容击穿,甚至燃毁驱动器[1]。飞轮负载就是大惯量负载,大惯量飞轮可以作为储能设备,在航空航天领域有相当的应用价值。解决大惯量负载电机制动或换向时电能回馈电压泵升过高问题有很大的工程研究意义。
处理泵升电压能量过高的方法通常有两种:①采用电阻能耗放电电路;②由晶闸管构成半可控有源逆变电路,通过能量回馈电路使之回馈到交流电网中[2]。第一种方法电阻功耗大,电阻容易发热,但是电路简单,易于实现。第二种方法能够实现能量回馈,起到节能的效果。但由于晶闸管只能控制其开通,不能控制其关断,为防止有源逆变颠覆,晶闸管必须留有充分的换流角裕度,故该电路的最小逆变角一般不小于30度,由此带来了如电压利用率下降、形成脉动环流、谐波含量大、功率因数低及工作可靠性不高等问题。针对一般电机驱动器不能有效处理大惯量负载电机回馈电能大的问题,本文设计的泵升电压抑制电路对回馈到驱动器的电能采用模拟控制的方式进行能耗抑制。本文研究的重点就是设计一种新型的大惯量直流力矩电机驱动器,使之可以通过改变控制电压的大小来线性控制电机转速,并通过给定值控制电机的转向;同时当电机处于发电状态时,H桥整流电路桥臂两端有过高的泵升电压时可以有效的抑制,使电机能快速的响应完成制动或换向。
2 驱动器总体结构
本直流力矩驱动器采用H桥式整流电路驱动电机能并实现对电机正反转的控制。设计由SG3525构成的PWM斩波电路和由IR2110构成的MOSFET驱动电路,驱动器保护电路,回馈能耗控制电路组成。驱动系统的上位机主控机是PC104嵌入式单片机,通过D/A提供的控制信号,控制PWM波形的占空比。在电机轴上安装光电编码器,向PC104反馈电机的转速大小和电机的旋转方向信息。同时在给电机供电的电路上设置LEM电流霍尔传感器,检测电枢电流的大小,通过PC104的A/D口回馈给主控机。这样驱动器的电流内环和转速外环共同构成双闭环对电机进行驱动控制,保证系统有良好的控制响应,使电机转速的线性控制良好,控制可靠。总体结构原理图如图1所示。
驱动器采用MOSFET构成H桥进行整流,通过控制信号控制PWM波的占空比大小对MOSFET的通断进行控制,从而通过控制输出到直流力矩电机的电压大小来控制电机的转速。为抑制力矩电机制动进入发电状态产生的泵升电压,在H桥上并接泵升电压抑制电路,对驱动器进行有效的保护。
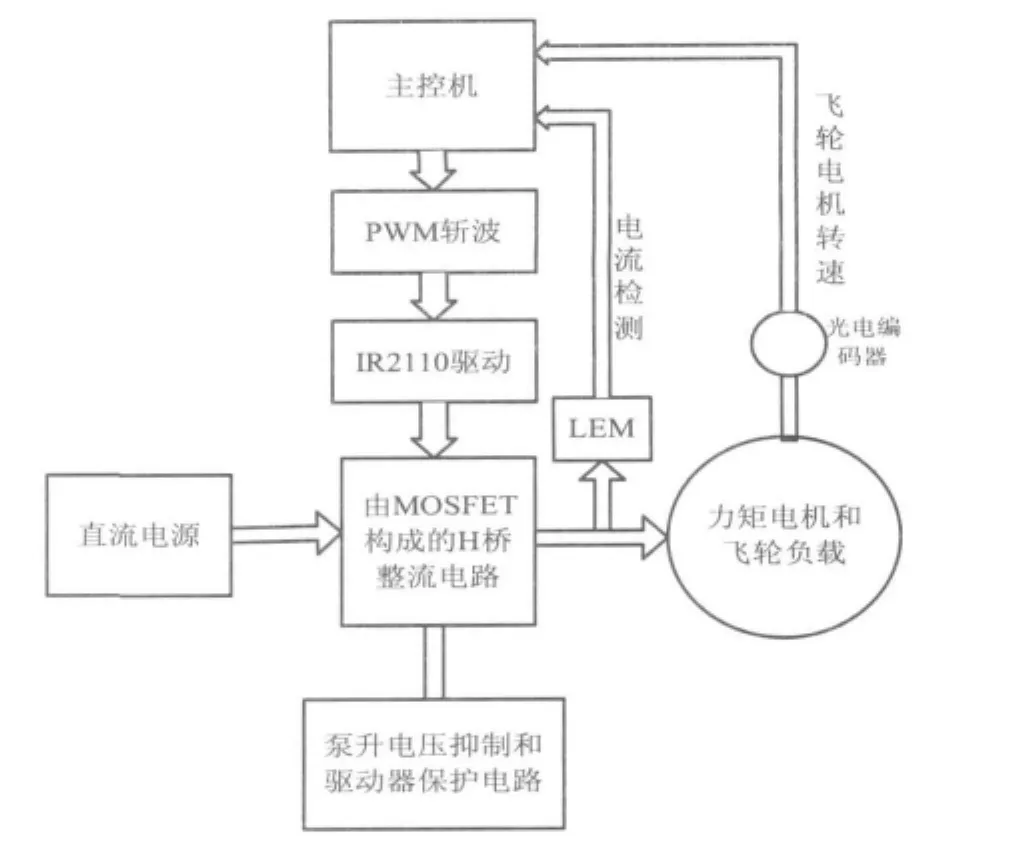
图1 驱动器总体结构图
3 PWM斩波电路
驱动器的PWM控制电路主要由SG3525构成,实现对电机正反转的控制和电机转速控制。SG3525是电流控制型PWM控制器,脉宽调制器是通过接反馈电流来调节脉宽的。在脉宽比较器的输入端直接用流过输出电感线圈的信号与误差放大器输出信号进行比较,从而调节占空比使输出的电感峰值电流跟随误差电压变化而变化。由于结构上有电压环和电流环双环系统,因此无论开关电源的电压调整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型控制器[3]。
PWM波产生电路如图2所示。
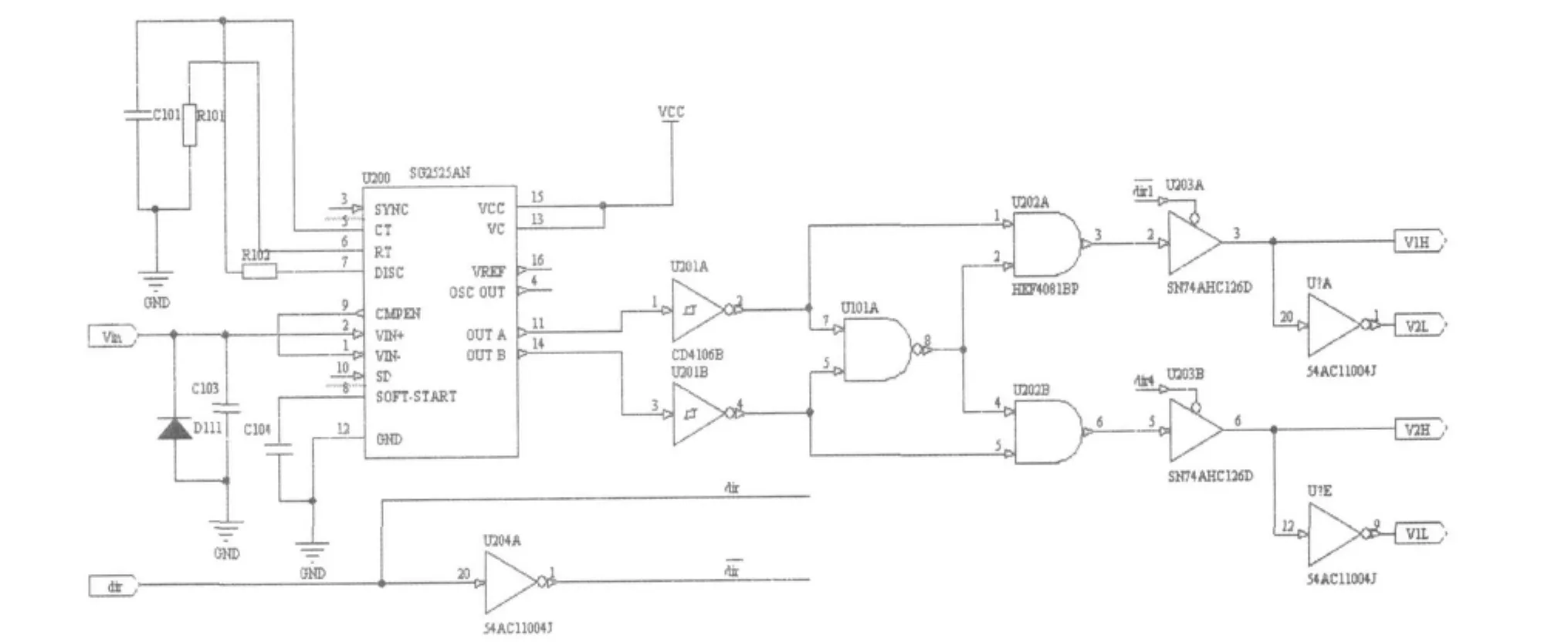
图2 PWM斩波电路
图中采用SG3525为主要芯片,通过输入电压的大小控制PWM的占空比。再用此PWM波驱动H桥MOSFET管的导通,控制输入到电机电压的大小来控制电机的转速。由于H桥上的MOSFET管在直通时,容易烧毁,本PWM驱动波形产生电路还增加了防止H桥同桥臂上下MOSFET管同时驱动导通的电路。
电机的转动方向由信号dir控制,当dir为高电平时,电机正转,dir为低电平时,控制电机反转。控制电路的实现如图2所示,采用缓冲门来控制正向的MOSFET打开或反向转动的门电路打开来实现对电机输入电压的极性控制,控制电机的转动方向。
飞轮控制系统驱动器的PWM波输入信号由PC104计算机设定的电压值和电流反馈经A/D采样通过控制算法得到的电压值计算给定。SG2525频率由电阻、电容给定,通过计算选择适合的电阻、电容大小。PC104计算机处理控制信号和反馈信号,给硬开关 PWM输入相应大小的电压值,由SG2525输出相应占空比的PWM开关波形,使系统具有很大灵活性。
4 H桥及泵升电压抑制电路
当电机的运行状态由高速制动至低速或停车时,电机转子动能的一部分转化为回路内阻的热能消耗掉,另一部分则通过续流二极管向电容器充电转化为电能,从而导致电容器两端电压迅速升高形成泵升电压。若此电压升高过多,会造成回路大功率器件的损坏,因此需要及时泄放或进行回收[4-6]。如图3所示,驱动器经二极管给母线供电,驱动器不能向电源回馈电能。当电机由制动转变为发电状态时,电机发出的电能通过MOSFET本身结构上存在并联的反向二极管向线路中的电容C204和C205充电。当电能过大形成的泵升电压超过设定值时,三极管Q103导通,电容上的电能通过电阻R204放电,从而达到抑制泵升电压的目的。
由能量守恒,可得电容容量的计算式为:

其中:
Um为线路设计承载最大电压;
Uo为线路额定电压;
J为电机和飞轮的总转动惯量;
ωo为飞轮的转速。
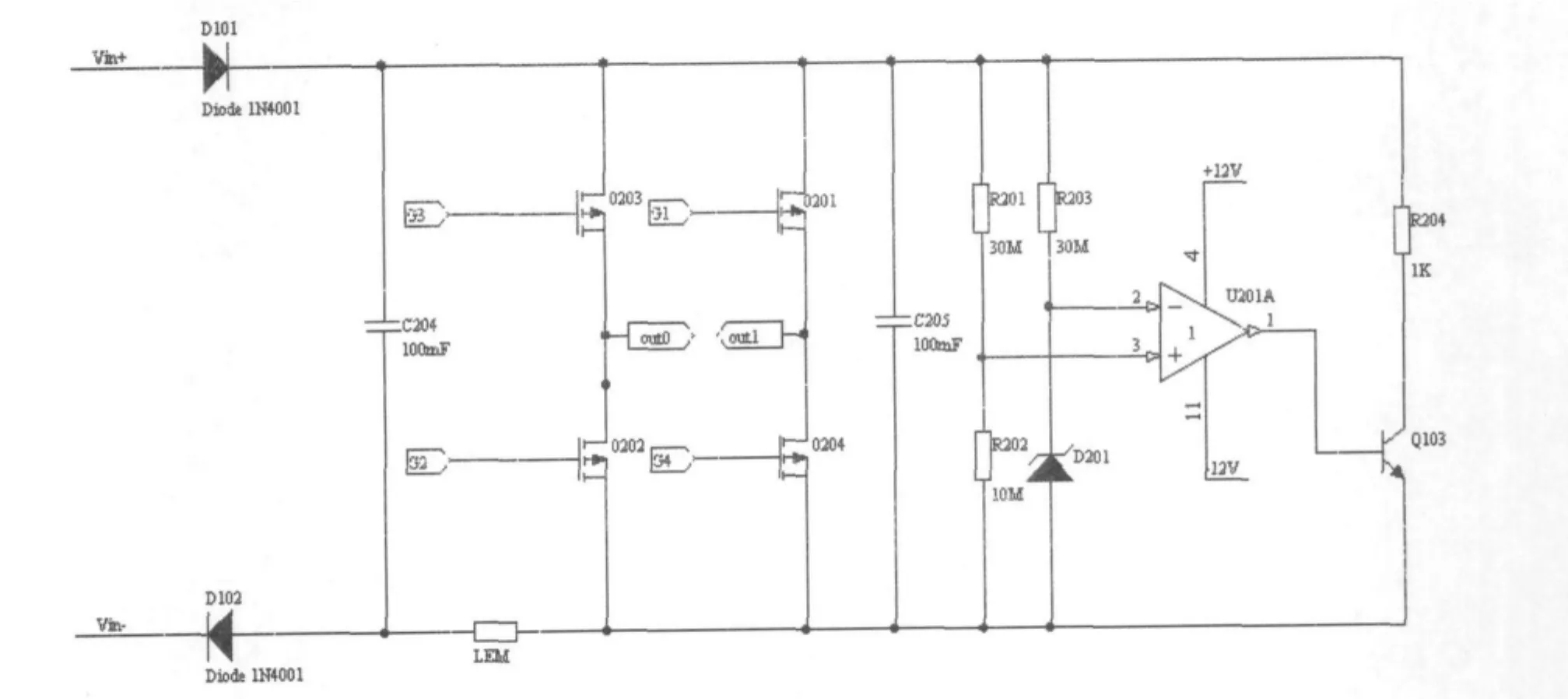
图3 泵升电压抑制电路
惯性飞轮材料选用铸铁,直径为1m,质量约50kg。惯性飞轮转动速度n为100~300r/min。电容器的Um一般取超过Uo的30%。本电机驱动Uo为40V,则Um取为52V。若飞轮从转动速度300r/min制动到停止,则可代数字进入(1)式进行计算可得出所需电路储能电容C的大小为558.74F。一般电路滤波电容为了达到滤波效果,不会取这么大的电容,则飞轮电机制动过程中飞轮动能转化为电能向电路电容充电,就会产生较大的泵升电压,对驱动电路的安全性构成威胁。所以本驱动器设计了泵升抑制电路抑制电压过高,当H桥臂两端电压高于52V的设定值时,比较器输入端3脚电压将超13V,超过比较器输入端2脚的13V稳压管电压,比较器输出端有电流输出,控制三极管导通,储能电容C205通过三极管和电阻R203放电,消耗电能,有效的保护电路工作在安全区内。
5 瞬时值电流采集电路
电流量的采样方法有串联取样电阻法、电流互感器法、霍尔传感器法。串联取样电阻法通过检测取样电阻上的电压值来检测通过电阻的电流,主要缺点是功率损耗大,电阻串接在主回路,电气隔离困难,需要外加光隔离器或磁隔离器。电流传感器具有精度高、线性好、频带宽、响应快、过载能力强和测量电路无损耗等优点。驱动器选用LEM公司生产的LA100P型电流传感器,如图 4所示。根据LA100P的数据手册,电路将交流额定电流衰减100倍后,变为幅值在-1.5V~+1.5V范围内变化的交流信号,再经过由AD712构成的加法电路提升1.5V,最终调理为0~3V的电压信号,送入PC104进行采样数据处理。
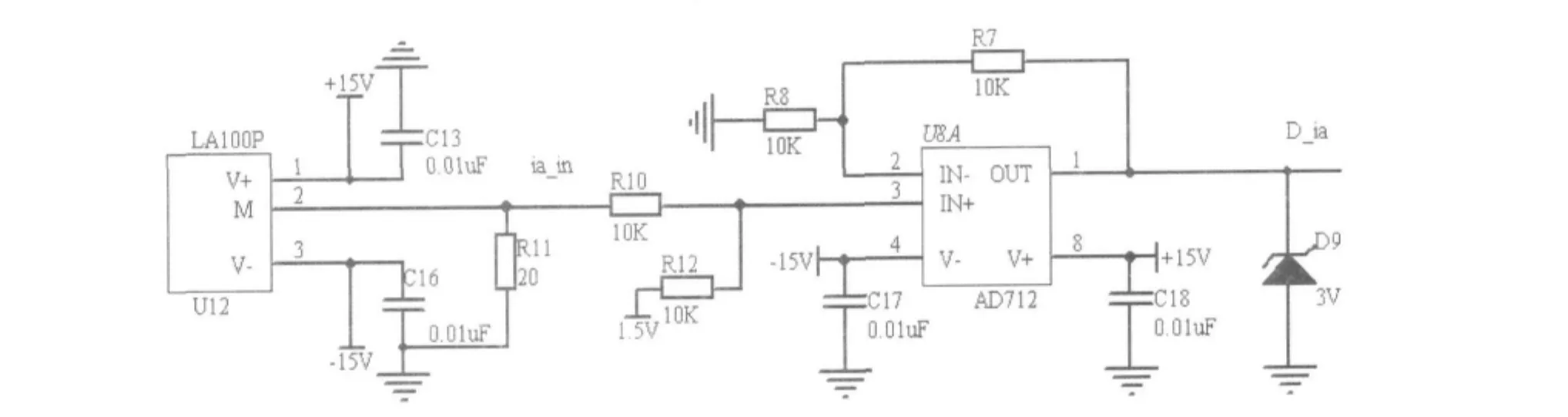
图4 交流电流采样调理电路
6 MOSFET驱动电路
由于电力MOSFET本身所致,在其漏极和源极之间形成了一个与之反向并联的寄生二极管,它与MOSFET构成了一个不可分割的整体。使得在漏源间加反向电压时器件导通,在使用MOSFET电路中要充分考虑到反向二极管的影响。
使MOSFET导通的驱动电压一般取10V~15V。对驱动电路的要求有:①栅极电压必须高于母线电压10V~15V,而且栅极电压可能是系统中的最高电压;②栅极的驱动电压应随源极电位的变化而相对浮动;③驱动电路吸收的功率很小,对系统总效率的影响几乎可以忽略不计[8]。
本驱动器MOSFET驱动,运用有自举功能的IR2110为驱动芯片。电路图如图5所示。VCC通过二极管和VB相连,VS管脚和VB管脚间连接一个电容充电,达到自举供电目的。驱动半边桥臂上下两个MOS管可以只需要用一个电源即可,使得电路变得简便易用,电源的布线简化,节省了驱动器的空间[9-11]。
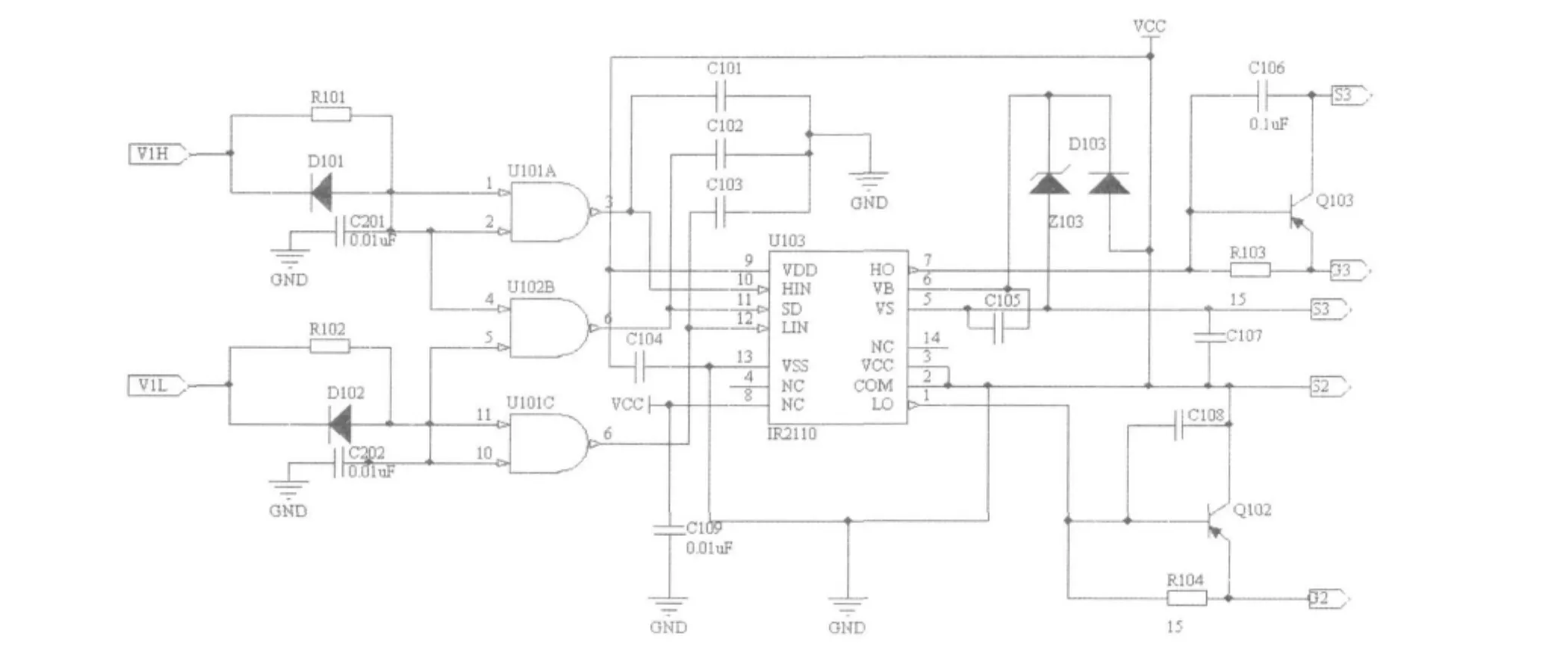
图5 整流桥MOSFET驱动电路
驱动电路IR2110输入信号经过电阻电容低通滤波和一个并联二极管给到输入管脚HIN和LIN上。电路输入的电阻电容低通滤波,可减少逆变器功率开关器件上的尖峰电压和尖峰电流,保证功率开关器件始终工作在安全区。同时,反向二极管可以在输入为低时将电容上存储的电量经二极管快速泄放,防止驱动的 MOSFET出现直通烧毁管子。PNP型三极管Q102和Q103的基极、集电极间并联电容器,基极和发射极间并一个电阻组成电路,使当输出为高时,电路可以通过电阻给MOSFET加栅极导通的电压。当输出为低,关断MOSFET导通时,MOSFET管栅极耦合电容中的电荷可迅速通过PNP三极管发射极向电容C108、C106充电,使MOSFET管可以快速关断,提高了管子开通关断的响应速度,可以在有回馈电能情况下,有效的保护驱动器。
7 实验与结果
试验用无刷直流力矩电动机,参数为:力矩电机负载飞轮直径1m,重量56kg。电机功率150W,额定电压48V,额定电流3.0/2.0A,相数为三相,最高转速1500r/min。经过试验得知,驱动器驱动电机实现平稳启动,转速平稳,调速快速性较好。可以通过控制输入电压的大小控制电机和飞轮的转速,系统在制动飞轮时,对泵升电压有良好的抑制作用,但还存在较小的扰动。抑制泵升电压电路,在额定电压附近虽有小小的扰动,但不影响驱动系统的可靠性。当驱动力矩电机,飞轮制动产生泵升电压,泵升电压抑制电路工作产生的波形如图6所示。
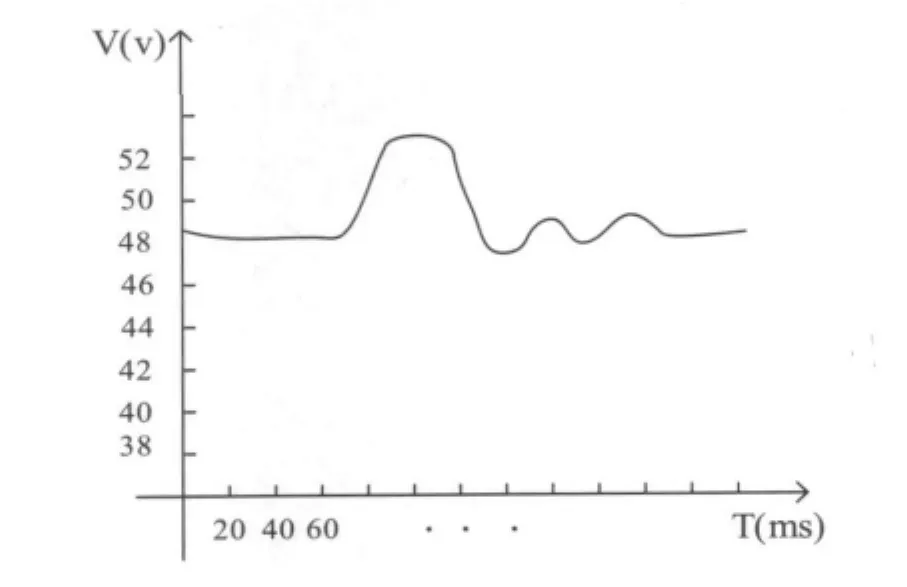
图6 泵升电压抑制波形图
由图可知,本文设计的力矩电机驱动器当回馈电能使电容两端电压超过52V时,泵升电压抑制电路开始接通工作,可以有效的迅速消耗电能使电压下降到额定电压。电容两端母线电压在电源额定电压的附近有小幅波动,但不影响驱动器系统的可靠性。泵升电压抑制电路能较迅速的消耗回馈电能,保护驱动器电路的安全。
8 结束语
文章设计的直流力矩电机驱动器能通过输入电压大小线性的控制电机转速。当飞轮制动大惯量负载时,电机由制动转入发电状态向H桥整流电路的滤波电容充电,电能在电容中聚集容易产生泵升电压。本文通过实验验证本驱动器设计的泵升电压抑制电路能很好的保护驱动器电路,有很好的可靠性。
[1]卢靖华,陈小江.大惯量飞轮电机的制动控制[J].微特电机,1995(5):30-33.
[2]陈伯时.电力拖动自动控制系统:运动控制系统[M].北京:机械工业出版社,2003.
[3]何琳琳,刘兆瑜,窦满锋,解恩.高空气球吊篮方位控制的反作用飞轮系统[J].微特电机,2007(8):36-38,41.
[4]杜坤梅,李铁才.惯性飞轮电机力矩伺服控制系统[J].电机与控制党报,2001,5(2):119 -120,130.
[5]王士湖,王莉,张新荣.变频器泵升电压控制电路的设计[J].电力电子技术,2002,36(6):64 -66.
[6]李勇,张代润,白平,陈洲,唐建华.SG3524与 SG3525的功能特点及软起动功能的比较[J].电源技术应用,2005(2):46-47.
[7]李桂丹,高晗琪,张春喜.基于SG3525的DC/DC直流变换器的研究[J].电源技术应用,2009,12(1):14-15.
[8]梁晖,金新民,郝荣泰.简单实用的功率MOSFET驱动电路[J].电力电子技术,1998(4):90-92.
[9]芦梅霞,骆世斌,郭世明.能耗制动抑制泵升电压检测电路的设计[J].重庆科技学院学报(自然科学版),2005,7(1):80 -85.
[10]马瑞卿,刘卫国.自举式IR2110集成驱动电路的特殊应用[J].电力电子技术,2000(2):31-33.
[11]张晓光,万淑芸,严青,王离九.直流脉宽调速系统中回馈能量的研究及泵升电路的设计[J].电工技术党报,1996,11(1):34 -37.
