基于内部总线的控制系统体系结构
2012-09-05曹荣向周剑敏
姚 宁,朱 琦,曹荣向,周剑敏
(北京控制工程研究所,北京 100190)
技术交流
基于内部总线的控制系统体系结构
姚 宁,朱 琦,曹荣向,周剑敏
(北京控制工程研究所,北京 100190)
控制系统是卫星平台的关键分系统.由于各卫星总体任务的不同,各卫星对控制系统的要求也不断变化,使得控制系统的配置随着任务的不同而发生较大变化,对控制系统的体系结构产生较大的影响.对目前控制系统体系结构的特点进行分析,提出基于内部总线的控制系统体系结构以适应不断变化的配置需求,并进行可行性分析.分析结果表明这种体系结构有利于系统的配置变化和带宽的提高,能满足不同平台任务的需要.
控制系统;体系结构;内部总线
国内卫星控制系统经过数十年的发展,已经完成了帆板驱动机构、动量轮、红外地球敏感器、星敏感器等部件的国产化,普遍采用基于串口和集中供电的体系结构.
当前国内的卫星发展很快,逐步形成了不同的平台要求,如测绘卫星平台对控制稳定度提出了更高要求,敏捷平台对机动能力提出了新的要求,主要体现在以下几个方面:1)由于图像处理和定位精度要求的提高,对控制系统(AOCS)内部的时钟精度要求更高,同时要求控制分系统能够提供更高频率的星敏感器和陀螺数据.因此AOCS需要采用GPS或者数管提供的秒脉冲信号对系统内部进行校时,陀螺数据和星敏感器数据的采集也采用硬同步机制,AOCC数据采集的时序更为复杂.2)敏捷平台卫星对敏捷能力提出更高要求,在滚动方向和俯仰方向均提出快速姿态机动要求.考虑整星的质量特性,动量轮已不能实现卫星的姿态机动要求,需要采用控制力矩陀螺.3)卫星平台对自主数据管理、自主任务规划提出了新的要求,因此在后续任务中可能要求控制系统自主计算控制中继天线和数传天线,甚至计算相机的积分时间.因此在控制系统的设计中需要充分考虑与外系统的接口.
由于不同类型的卫星对控制系统的要求不断变化,随着任务的不同控制系统的配置发生较大变化,这就对控制系统的体系结构产生较大影响.目前,国内各卫星的控制系统普遍采用基于串口和集中供电的体系结构,随着选用的敏感器和执行机构的不同,控制系统的控制器的技术状态需要随着任务的不同而改变.国外的控制系统一般采用总线和串口相结合的方式.本文提出一种基于内部总线的控制系统体系结构,并完成可行性分析.采用这种体系结构,针对不同的任务需求和配置,控制器的技术状态可以实现统一,并且可以提高系统的带宽.
1 基于串口和集中供电的控制系统体系结构
目前国内各卫星普遍采用的基于串口和集中供电的控制系统体系结构的基本概况为:1)控制系统采用以控制计算机为中心、各线路组成局部终端单元(LTU)形成的星形拓扑结构.各敏感器和执行机构均有独立的线路作为LTU.控制计算机与各LTU之间采用串口点对点通信.控制计算机通过与各LTU的通信采集各敏感器的信息,通过D/A输出、串口和并口输出控制执行机构,包括动量轮、磁力矩器、帆板驱动线路和推进子系统.2)控制系统采用集中供电,由电源分系统给控制系统提供一次电源、一次电源地、各种二次电源和二次电源地.一般而言,控制系统需要的电源类型包括电子线路使用的+5V、±12V,功率线路使用的±20V、+27V、+35V等电源类型.当采用集中供电时,所有的机电和电子部件均共用电源.控制系统内采用电源分配器(SDC),完成各部件电源切换管理功能.3)各部件的模拟量遥测汇集到SDC,SDC输出给数管分系统采集.
基于串口和集中供电的控制系统体系结构规范了控制计算机、电源分配器和其他部件的接口关系,具有一定的灵活性.其特点为:1)采用控制计算机(AOCC)与各LTU的星形连接方式,规范了通信协议,有利于部件接口设计和AOCC接口设计的规范化.系统的信息流清楚,时序控制由AOCC完成,便于系统联试.2)具有一定的开放性,在设计时考虑串口以及其他接口的余量,在系统发生变化时可以不改变基本的体系结构.3)采用集中供电方式,各组电源采用热备份电源或者冷备份电源.部件直接使用二次电源,部件设计简单.
随着任务的不断细分,各卫星的配置各不相同,基于串口和集中供电的控制系统体系结构也存在一定的局限性,主要体现在:1)基于串口的数据交换方式.AOCC与各LTU之间为星形连接,在LTU数量发生较大改变时,AOCC的接口设计需更改.2)采用集中供电方式.整星采用的电源模块分为热备份和冷备份两种方式.若采用热备份电源,电源切换时可以平滑过渡,不影响负载工作,但热备份的工作状态需要靠压差设计才能可观,其次在电源的输入、输出处存在单点故障.若采用冷备份电源,具有自主切换和遥控切换的功能,但会造成电源电压工作不连续.机电部件使用此种电源时,存在部件断电又加电的模式,需对部件的安全性进行充分的分析.若出现一个负载过流,可能使该组二次电源保护,从而影响系统的工作.3)SDC汇集各部件的模拟量,输出给数管分系统采集.若部件配置发生变化,将影响SDC的设计.同时采用这种方式,SDC内部电缆和整星电缆的设计均较为复杂.
2 国外控制系统体系介绍
国外控制系统体系结构有如下特点:1)通过综合电子的设计思想,有效地实现了平台减重;一方面在电子产品设计中大量采用FPGA和ASIC等元器件,通过提高集成度减轻了电子设备本身的质量;2)采用标准化总线的应用,有效地减少了电缆网的质量;3)卫星平台按通用化的思想进行设计,使平台具有良好的扩展性,不需要进行较大的改动就能适应不同飞行任务的要求,其成熟度和可靠性可以得到了大量卫星在轨飞行的验证.以下给出两个具体用例.
2.1 洛克希德-马丁空间系统公司的LM900平台
洛克希德-马丁空间系统公司的LM900平台[1]采用统一的星载计算机,完成卫星的姿态轨道控制和数据管理,实现对有效载荷、热控、能源的管理和遥控遥测功能,其体系结构基于 MIL-1553B和RS422总线.综合电子系统的核心是平台控制器(BCE),其中包括两台霍尼维尔603e星载计算机,运行飞行软件实施整星管理.BCE还包括支持整星安全模式的应急硬件电路,在故障情况下维持卫星的命令和控制功能.BCE与各部件的连接使用了MIL-1553B和RS-422两种总线.姿态传感器通过各自的接口连接到BCE.
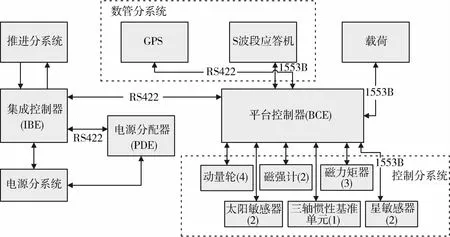
图1 LM900平台的综合电子系统Fig.1 Integrated electronics for LM900 platform
2.2 NASA哥达得研究中心的“月球勘测轨道器”(LRO)
探测器的核心为高性能的RAD750空间计算机,其体系结构基于1553B总线和Spacewrie高速总线,其中1553B实现控制(星敏、动量轮)、推进、电源管理和部分有效载荷与RAD750空间计算机的数据交换;Spacewrie高速总线实现遥测遥控、星务和部分有效载荷与RAD750空间计算机的数据交换[2-3].
3 基于内部总线形式的控制系统体系结构
为了提高系统的可扩展性,适应各卫星不同部件配置的需求,控制系统可采用内部总线的结构形式,以达到系统配置变化控制器接口不变的目的.控制系统的体系结构如图2所示.控制计算机和各部件之间需要传送的信息包括:控制指令、数据和同步信号.其中控制指令和数据通过总线或其他标准接口进行信息的传输.同时提高电子线路的集成度,自行采集各部件的遥测信息,通过外部总线将数据传给数管分系统.
同时为了提高系统电源的可靠性,将集中供电改为分散供电.
3.1 内部总线的选择
内部总线的选择主要取决于总线上信息量的大小以及传输速率要求,同时考虑总线的可靠性和成熟度.
姿态轨道控制分系统总线上传输的信息量包括两个部分,第一部分为控制器采集的各部件信息,主要有:红外地球敏感器信息、数字太阳敏感器信息、模拟太阳敏感器信息、0-1太阳敏感器信息、陀螺信息、加速度计信息、星敏感器信息、磁强计信息、动量轮信息、控制力矩陀螺信息、帆板驱动机构信息和天线驱动机构信息;第二部分为控制器发出的控制指令,主要有:各部件的加断电控制指令、动量轮控制指令、控制力矩陀螺控制指令、帆板驱动机构控制指令、推力器控制指令、自锁阀控制指令、数传天线控制指令和中继天线控制指令.
通过分析可知,姿态轨道控制分系统在一个控制周期内的交换的信息不超过600字节.由此可知系统内采用一个中速的总线即可,1553B总线和CAN总线均可满足要求[4].
CAN总线作为低成本的现场总线,具有较高的总线利用率,具有可靠的错误处理和检错机制,可根据报文的ID决定接收或者屏蔽该报文,在发送的信息遭到破坏后可自动重发,并且节点在严重错误的情况下具有自动退出总线的功能.
1553B总线为指令/响应型,分时复用总线,适合于集中分布式的采集系统,它实时性好,可靠性高,结构简单,终端扩展方便.通过采用备份控制器、双冗余的数据总线,有效提高可靠性,同时它还利用反馈重发方法控制出错,抗干扰能力强.
两种总线各具特点,均具有作为系统内部总线的条件.相比而言,1553B总线在以下几点更具有优势[5]:1)可靠性更高.1553B各节点具有高水平的电器保障性能,采用电气屏蔽和总线耦合方式,每个节点都能够安全地与网络隔离;同时为了保证网络的正常运转,1553B网络中采用激活和备份两个总线控制器,通过硬件双冗余结构,充分保证了系统可靠性;再有1553B传输协议中每个传输字中均有独立的奇偶校验位,从软件协议层面进一步提高的系统的可靠性.因此,1553B总线总体可靠性更高.2)速度更快,实时性好.1553B总线与CAN总线最高传输速率相当均为1Mbps,但在实际应用时1553B总线使用速率能够达到1Mbps,CAN总线使用速率一般为500Kbps(307.2Kbps),1553B总线的实际速率为CAN总线的2~3倍;同时1553B总线传输一个固定的消息所需的时间要短,即系统整体实时性更好,适合高带宽系统快速采集的功能需求.3)内部具有大容量数据缓冲区,系统时序设计更为简便.目前CAN总线接口常规使用SJ1000+82C250的形式,SJ1000中仅有64字节的接收数据缓冲区;而1553B总线使用的 BU-61570(61580)具有 4K× 16bit的内部RAM.因此1553B总线使用时不用过度考虑通讯时序、传输数据长度限制、中断打断等因素,使用更为简便.
综合考虑,控制系统内部总线可以选择1553B总线.

图2 控制系统体系结构简图Fig.2 AOCS configuration sketch

图3 控制系统电源拓扑图Fig.3 AOCS power distribution topology
3.2 基于内部总线的控制系统体系的时序分析
基于串口的控制系统由于采用的是 RS422总线形式,在各部件共用一个串口时AOCC采用多路开关进行串口的切换控制,系统在数据采集上耗时较多.一般而言,采用115.2Kbps的串口速率,数据采集时间为50ms,整个计算时间和控制指令发出时间仅为30ms.目前采用RS422串口形式的计算机,通常使用FPGA设计有一定字节数的FIFO作为串口芯片,以缩短系统数据采集的时间.但若所有部件信息均用带FIFO的串口采集,对控制器需要较多的FPGA资源,尤其是处理如星敏感器等数据较多的部件.而且由于各卫星控制系统的配置的部件不同,因此需要的串口数目不同,不利于FPGA设计的统一.
若采用1553B总线连接各部件,1553B总线的速率为1Mbps,时序的控制由总线控制器(BC)即控制计算机实施,各部件作为远程单元(RT)以查询或者中断的方式响应BC的命令.而且1553B芯片与CPU有4K×16bit的共享RAM,1553B芯片可自主完成消息的读写操作、消息重试,不占用控制器CPU的时间.对于控制系统而言,整个控制周期内总线上数据传输时间约为6ms(以600字节为例).因此系统的时间主要是部件数据准备时间、程序算法运行时间.对于单个部件而言,在接收到同步信号到数据准备好时间均小于10ms.从分析可知在采用了1553B总线后,整个系统的控制周期可以缩短,有利于整个系统的带宽提高.
3.3 AOCC和应急线路对内部总线的管理方式
在正常情况下,AOCC工作,应急线路不加电,AOCC作为内总线的BC,其他部件作为RT.AOCC通过内总线告知RT需要准备的数据,在每个控制周期的开始或者根据系统内同步信号的设置在以一定的时序通过内总线获得各部件的信息.作为执行机构的RT以中断方式响应BC的指令.
在应急模式下,应急线路加电.AOCC通过硬件信号在得知应急线路加电后,封锁内部总线,应急线路作为内总线的BC,应急线路作为BC时系统的运行方式与AOCC作为BC时类似.
3.4 基于内部总线的控制器的接口设计
采用内部总线形式后,控制器的接口简化,主要接口包括:内部1553B总线接口、外部总线接口、同步信号输出接口、部件电源切换接口.
各部件完成本部件的数据处理和模拟量的采集,通过内部1553B总线传输给控制器.控制器将大量的遥测量通过外部总线传输给数管分系统.控制器设计多种频率的同步信号以满足不同部件的时序要求.若同步信号接口采用 RS422差分接口方式,可以根据各部件不同的时序要求,将时序要求相同的部件共用一个同步信号,有利于系统的扩展.同时1553B总线指令也可以作为同步信号的冗余备份措施.因此在控制器的设计中主要考虑同步信号和部件电源切换的余量设计.
4 基于内部总线的控制体系和基于串口和集中供电的控制体系的对比
上面介绍了控制系统的两种体系结构,下面对两者进行比较.1)采用总线结构,控制器的接口设计简单,不受控制系统部件配置不同的影响.若采用串口的方式,控制器的接口设计随系统配置的变化而变化,不利于技术状态的统一;2)总线的传输速率一般较串口高,若采用智能的总线芯片,可较大提高数据采集速度.若采用串口的方式,数据采集耗时较多,或者需要较多资源的FPGA来实现;3)基于内部总线的控制体系采用分散供电的方式,较集中供电的可靠性高.
5 结 论
随着各个卫星平台功能指标的进一步细化,不同卫星平台的控制系统要实现不同的功能,有的需要提高系统的稳定度,有的要求敏捷机动,因此不同卫星平台控制系统的配置将相差较大,为了保证控制器的技术状态不受系统配置的影响,可采用内部总线的方式以适应不同的配置需求,从分析可知采用内部总线的控制系统结构技术上可行,且有利于系统带宽的提高.
[1] Rudiger C,Malin M,Martin F.Application of existing satellites to space and earth sciencemissions[C].IEEE Lockheed Martin Missiles&Space Aerospace Conference,Sunnyvale,CA,USA,1997
[2] 胡智新,张熇.月球坑观测与感知卫星将撞击月球[J].国际太空,2009(4):13-18 Hu Z X,Zhang H.LCROSSwill impact themoon[J]. Space International,2009(4):13-18
[3] 邓湘金,张熇,彭兢.解读月球勘察轨道器(LRO)[C].中国空间科学学会空间探测专业委员会第19次学术会议,宁波,2006 Deng X J,Zhang H,Peng J.Explanation on the lunar reconnaissance orbiter(LRO)[C].The 19thConference of Space Exploration Committee,Ningbo,China,2006
[4] 数字式时分制指令响应型多路传输数据总线[S]. GJB289A-97 Digital time division command/response multip lex data bus[S].GJB289A-97
[5] 廉保旺,李勇,张怡.CAN总线与1553B总线性能分析比较[J].测控技术,2000,19(6):47-49 Lian B W,Li Y,Zhang Y.Performance analysis and comparison on CAN bus and 1553B bus[J].Measurement&Control Technology,2000,19(6):47-49
Internal Bus-Based AOCS Configuration
YAO Ning,ZHU Qi,CAO Rongxiang,ZHOU Jianmin
(Beijing Institute of Control Engineering,Beijing 100190,China)
The attitude and orbit control system(AOCS)is the critical subsystem of the satellite.According to different requirements for satellites,AOCSs have different configurations because of various sensors and actuators to be chosen.The characteristics of AOCS configurations being used are described in this paper,then a new internal-bus based AOCS configuration is discussed which can be adapt to different requirements and be benefit to improve the system bandwidth.
control system;configuration;internal bus
V448
A
1674-1579(2012)02-0030-05
10.3969/j.issn.1674-1579.2012.02.006
姚 宁(1972—),女,研究员,研究方向为先进控制理论和控制技术;朱 琦(1979—),男,工程师,研究方向为航天器控制系统设计与测试;曹荣向(1979—),男,工程师,研究方向为航天器制导、导航与控制;周剑敏(1982—),男,工程师,研究方向为航天器制导、导航与控制.
2011-12-20
