步进电机控制系统的设计及应用
2012-08-26刘淑聪彭宏伟
高 琴,刘淑聪,彭宏伟
GAO Qin, LIU Shu-cong, PENG Hong-wei
(防灾科技学院 防灾仪器系,三河 065201)
0 引言
传统的步进电机控制方法是由触发器产生控制脉冲来进行控制的,但此种控制方法工作方式单一而且难于实现人机交互,当步进电机的参数发生变化时,需要重新进行控制器的设计[1]。而且由传统的触发器构成的控制系统具有控制电路复杂、控制精度低、生产成本高等缺点。为了克服传统控制器的缺点,满足工业生产新的控制要求,在此需要采用一种以单片机为核心的新型控制器。步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,其最大特点就是通过输入脉冲信号来进行控制,电机总转动角度由输入脉冲数决定,电机的转速由脉冲信号频率决定,因此适合于单片机控制,单片机通过向步进电机驱动电路发送控制信号就能实现对步进电机的控制[2]。
1 系统硬件设计
控制系统的设计分为两大部分:硬件部分和软件部分。硬件部分的设计包括脉冲发生模块、电流放大模块、液晶显示模块和键盘输入模块四个部分。软件部分的设计包括键盘扫描模块、脉冲发出模块、液晶显示模块、延时模块和加减速模块等。
本文使用的是两相混合式步进电机,型号为42H33H-1334A,最小电压为2.8V,最小电流为1.33A,电阻为2.1Ω,电感为2.5H,静转矩2.2kg·cm[3]。采用AT89S52单片机、1602液晶显示屏、4×4矩阵键盘分别进行控制运算、显示、控制输入。硬件部分设计框图如图1所示。

图1 系统硬件设计框图
1.1 脉冲发生模块
步进电机的驱动脉冲是由单片机产生的。在这采用P1.7,P1.6,P1.3,P1.2分别对步进电机的A,A'、B,B'端口输入脉冲。脉冲的频率通过软件来设定。
两相四线步进电机的工作方式有[4]:
1)两相四拍:A- B - A'-B'-A-......;
2)两相双四拍:AB-BA'-A'B'-B'A-AB-......;
3)两相八拍:A-AB-B-BA'-A'-A'B'-B'-B'A-A-......;
本文采用两相八拍。其工作方式通电换相的相序如上3)所示,共8个状态。如果P1口输出的控制信号中,用“0”和“l”分别代表绕组通电和断电,则可用8个控制字来对应这8个状态。在程序中,只要依次将这8个控制字送到Pl口,每送一个控制字,就完成一拍,步进电机转过一个步距角。程序可根据这个原理来设计。
1.2 电流放大模块
本文采用的驱动芯片是L298N芯片。L298N是高电压,大电流双全桥驱动芯片,L298N有单极性和双极性两种工作方式,本方案选用单极性工作方式,通过单片机控制L298N,使得从单片机发出的驱动脉冲经过L298N电流放大,然后驱动步进电机。在这使用P1.0,P1.1, P1.4,P1.5控制L298N的使能端口,在单片机输出驱动脉冲前全部置为高电平——使能。根据L298N的原理,将4路驱动脉冲都分别通过两个端口输入,两个端口输出,最后并联,以提高步进电机的驱动电流。部分电路如图2所示。
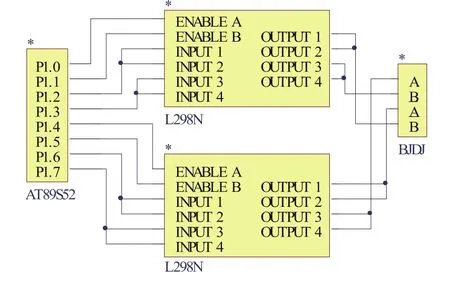
图2 电流放大电路连接图
2 系统软件设计
系统软件主要完成键盘扫描、液晶显示、控制L298N使能端和脉冲输出。主程序主要完成硬件初始化、子程序调用等功能。适当使各项功能模块化。为了节省单片机CPU资源,合理利用单片机定时器控制脉冲的频率,改变转速。根据以上分析得到的程序流程图如图3所示。
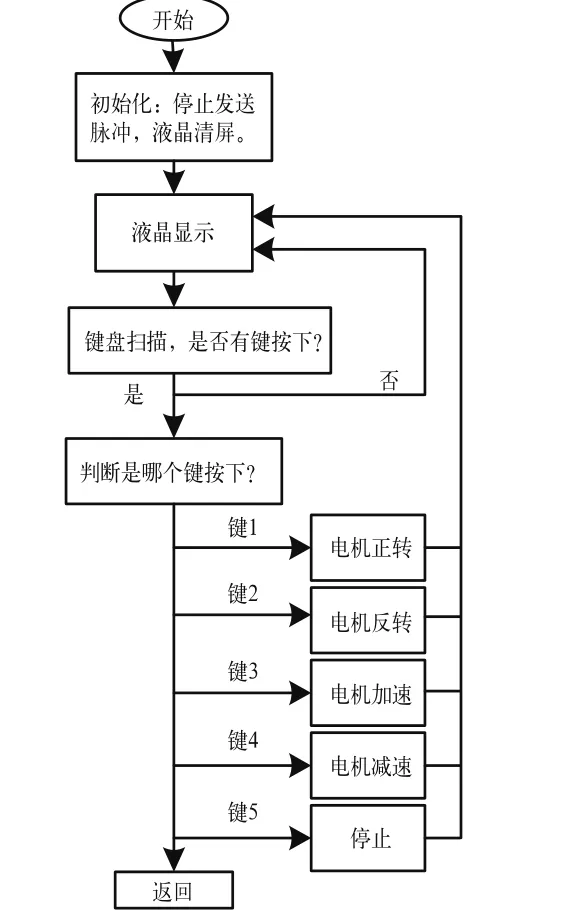
图3 系统软件设计流程图
2.1 中断的使用和基本定时
在本设计中,使用中断2进行最基本的定时—10μs。使得脉冲频率方便改变。以下是选用中断2、计时初始化和启动中断2的语句:
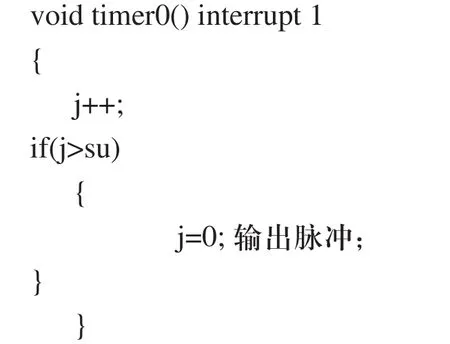
2.2 定时步进电机驱动脉冲程序
首先,将需要发出的脉冲以十六进制数型式存入数组。然后根据所设定的脉冲频率,逐个输出数组内的数到P1口,即产生相应的脉冲。部分程序如下:
定义数组:
unsigned char code Z_Rotation[8]={0xB3,0xBB,0x3B,0x7B,0x73,0x77,0x37,0xB7};
unsigned char code F_Rotation[8]={0xB3,0xB7,0x37,0x77,0x73,0x7B,0x3B,0xBB};
2.3 液晶显示程序模块
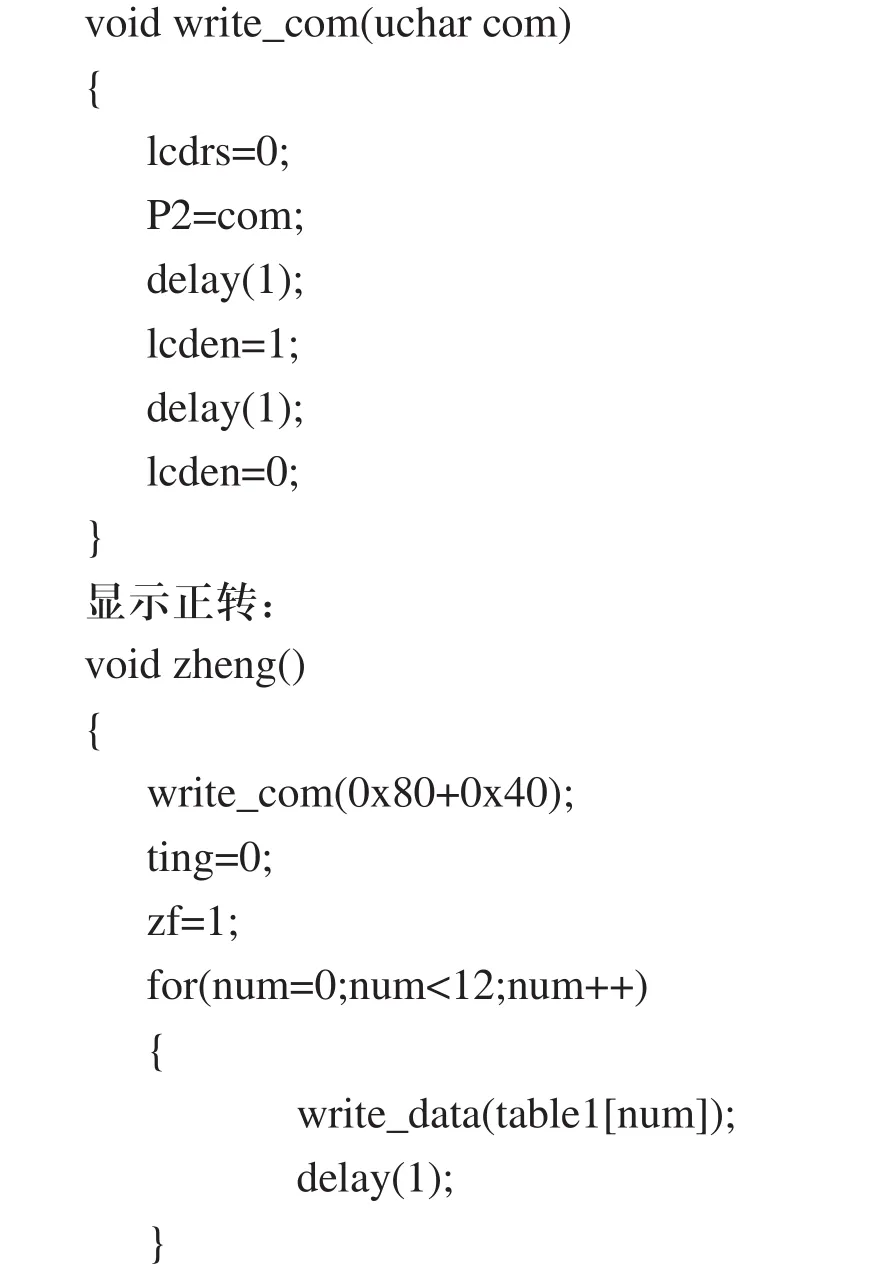
本设计采用的是常用的1602液晶屏,所以有较固定的程序模块。部分程序如下:
给液晶写指令声明:

2.4 加减速控制程序
步进电机的加减速只需要控制它的驱动脉冲频率,而改变频率,则只需要改变脉冲的输出时间,即改变相应数组的调用时间[5]。灵活使用变量,可降低程序的书写难度。在这里,su为设定中断的次数,控制脉冲的输出时间;num2为电机速度级状态变量,说明需要多长时间的驱动脉冲时间。程序说明如下:
当最低速时,num2=1,su=500;
当次低速时,num2=2,su=200;
当中速时,num2=3,su=100;……
3 步进电机在地震旋转振动台模型中的应用
理论分析和震害现象表明,高层建筑物结构在地震作用下的反应由于地面质量间运动的差别,可使地面的每一部分不仅产生平动分量,而且产生转动分量[6]。这种转动分量迫使高层建筑物结构产生扭转,还可能会发生扭转振动。震害表明,扭转作用会加重结构的破坏,造成地表和建筑物的破坏。同时随着震害经验的不断积累,人们逐渐认识到在进行抗震分析时仅仅考虑单分量作用是不够的,多分量对结构的影响是不可忽视的。然而现今的地震记录中,实际可靠的地震动转动分量记录的强震观测还没有获得突破[7]。
步进电机是一种将电脉冲转化为角位移的执行机构,通过控制脉冲个数来控制角位移量,也可以通过控制脉冲频率来控制电机转动的速度和加速度。由于步进电机独特的工作方式,本设计对步进电机实现角位移控制,通过电机运动产生的角位移分量模拟地震时对高层建筑物的扭转分量,模拟地震对建筑物的破坏程度,对地震旋转振动台的模型进行了初步探究。
4 结束语
本文在分析步进电机的主要特点和工作原理的基础上,设计出了简单实用,以AT89S52单片机作为控制器的控制系统硬件电路和运行软件。系统既能实现正转反转,又能实现分五个档进行调速;软件有效的节约了硬件资源,同时系统易于拓展,该系统在地震旋转振动台的模型研究中已取得了初步的应用。然而,本文只就步进电机正转反转、加速减速这几项技术进行了部分设计,在系统设计的抗干扰性方面、角度控制方面还有待于进一步的探究。
[1]史敬灼.步进电动机伺服控制技术[M].北京:科学出版社,2006.
[2]余世超,高志,邵鹏.基于单片机的步进电机控制系统设计与研究[J].煤矿机械.2010.31(5):210-212.
[3]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2002.
[4]孟武胜,李亮.基于AT89C52单片机的步进电机控制系统设计[J].微电机.2007.40(3):64-66.
[5]巫传专,王小雪.控制电机及其应用[M].北京:电子工业出版社,2008.
