变电站智能巡检机器人云台控制系统设计
2012-10-12王海鹏王明瑞孙大庆
肖 鹏,王海鹏,曹 雷,王明瑞,孙大庆,曹 涛
XIAO Peng1, WANG Hai-peng1, CAO Lei2, WANG Ming-rui2, SUN Da-qing2, CAO Tao2
(1.山东电力研究院 国家电网电力机器人技术实验室,济南 250002;2.山东鲁能智能技术有限公司,济南 250101)
0 引言
随着科技进步和电力体制改革的不断深入和发展,电力系统自动化程度已有了很大提高,很多变电站实现了遥测、遥信、遥控、遥调功能,为少人或无人值班变电站,但一定程度上都还存在因无人在现场及时监视、巡视而带来的一系列问题甚至留下隐患[1,2]。变电站智能巡检机器人则可携带检测设备对变电站内电力设备进行检测,在一定程度上解决了上述问题。变电站智能巡检机器人对电力设备进行检测的工作流程为:首先机器人按预定路线运行至指定位置;然后调用安装于机器人顶部云台的预置位功能,云台带动检测设备对准待检电力设备;最后采集电力设备状态数据并通过无线网络传输至监控后台。在整个检测过程中,云台处于承上启下的位置,其性能直接影响到巡检机器人完成巡检任务的质量。
由于各个变电站内环境一般都不相同,并且待检电力设备数量众多,这就要求云台具有控制灵活、适应性强、预置位数量大、便于集成等特点。目前,云台生产厂家的产品基本上都只有诸如64、128、256等这些有限数量的预置位且控制协议相对封闭,很多情况下无法满足变电站现场多种功能实现的需要。针对巡检任务对云台性能需求的特殊性,本文设计了巡检机器人云台控制系统,详细描述了其软硬件的设计过程。
1 系统特点及结构
本文所述云台本体采用模块化设计,结构紧凑坚固,具有IP67防护等级,最大载重16Kg,运行范围水平为0°至365±2°,垂直为-20°至90°,齿轮啮合间隙小于0.1°;云台控制电路采用优化的电路设计及合理抗干扰措施,保证了其能在恶劣的电磁环境中长期稳定运行;系统软件方面,采用了基于时间和事件触发的混合式系统设计模式,并利用了自顶向下逐步求精的开发方法,保证了控制软件的高可靠性和实时性;通过软硬件的配合,实现了对云台姿态的高精度控制、云台运行参数和状态可在线设置和查询、预置位多达1000个(硬件存储时)至无穷多个(需控制协议配合)等一系列功能,保证了巡检机器人可靠高效的完成巡检任务。整个控制系统的结构如图1所示。
图1所示的云台控制系统包含直流伺服电机、角度传感器、硬件限位和云台控制板4部分,它们分别负责云台水平和垂直运动时的驱动、位置反馈、行程保护和系统控制,整个系统采用机器人内部24V电池供电,并通过RS485总线与机器人工控机连接,工控机负责转发机器人监控后台下发的云台控制指令至云台控制板。

图1 系统结构示意图
2 系统硬件设计
云台控制系统硬件核心是云台控制板,如图2所示,其由微处理器模块、电机驱动模块、角度采样模块、通信模块及供电模块五部分构成。

图2 云台硬件系统结构示意图
2.1 微处理器模块
该模块由ATmega128单片机与外围IO电路构成。ATmega128单片机是Atmel公司生产的一款高性能、低功耗的AVR®8位微处理器,具有先进的RISC结构和指令集,由于其单时钟周期指令执行时间,工作于16MHz时性能高达16MIPS[3]。单片机内128K字节程序存储器和4K字节EEPROM被分别用来存储控制系统程序、系统参数和预置位数据;该模块利用片上PWM输出口与电机控制模块连接,云台角度采样模块和通信模块则分别与单片机SPI端口和串行口连接。
2.2 电机驱动模块
根据云台负载条件,云台水平和俯仰各伺服电机通过的最高电流可达2A,本文选用了美国国家半导体公司(NS)推出的专用于直流电动机驱动的H 桥驱动芯片LMD18200。该芯片最高工作电压可达55V,峰值输出电流可高达6A,能持续输出3A电流,并具有温度报警和过热保护功能[4],由于其集成了电机驱动常用功能,可有效减少外围电路原器件数量,有助于提高系统可靠性。该模块原理图如图3所示(以水平方向的电机驱动电路为例,垂直方向与水平方向电路相同)。
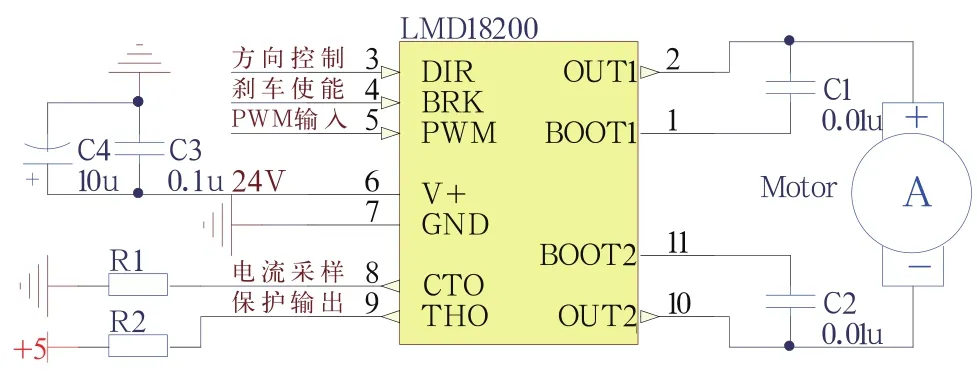
图3 电机驱动模块原理图
2.3 角度采样模块
由于云台水平和垂直运行角度采用模拟量反馈方式,因此需要对得到的模拟信号进行AD转换,虽然ATmega128单片机集成了片上AD转换功能,由于其为10位分辨率,云台水平运动时其角度分辨率最高约为0.36°(以一周365°计算,下同),因云台机械传动精度小于0.1°,故不能达到所需定位精度。本文外扩一片12位AD转换芯片TLC2543,从而将云台水平运动的角度分辨率提高至0.09°。TLC2543是TI公司的12位串行模数转换器,使用开关电容逐次逼近技术完成A/D转换过程,提供的最大采样速率为66ksps,工作范围内10μs转换时间,供电电流仅需1mA(典型值)[5],由于其数据传输使用SPI串行通讯端口,可以很方便的与ATmega128连接。
2.4 通信和供电模块
通信和外围供电电路设计主要从提高硬件电路抗干扰性出发,对相关电路进行优化设计,保证系统运行的可靠性。通信模块选择了RS485通信方式,同时采用通信模块电源与微处理器模块电源隔离及信号传输光电隔离等手段,切断干扰由通信线路传输至微处理器控制电路的通道,降低了干扰由通信线路引入的可能性。考虑到系统电源会受到云台电机运行时电刷换向及PWM输出的干扰,通过增加PCB内部电源层和地层、合理的元器件布局及增加去耦电容等方法予以抑制。
3 系统软件设计
在硬件电路设计好后,系统软件设计是最重要的部分,由于系统功能主要利用软件实现,这样就使得硬件电路设计的简化和成本低可以得到实现,同时也方便日后对系统功能的升级。系统软件设计主要包含系统功能、控制算法和控制软件的设计三部分。
3.1 系统功能设计
巡检机器人在控制云台过程中,一方面需要云台能够按要求动作,另一方面也需要云台满足一些特殊的功能要求,如参数设置、运行状态监控等。根据这些要求,云台控制系统提供的主要功能有:云台姿态调整、预置位设置及调用、直接数据控制、控制参数设置、控制精度补偿、云台运行状态查询等。值得说明的是,“直接数据控制”功能是指云台可以通过协议接收数据并运动至相应姿态的一种云台控制方式,云台预置位可独立于云台控制板存储,因此允许预置位以任意方式存储于任意位置,而预置位个数也可达到无限多个。
为方便系统功能的使用,本文开发了一套私有的云台控制协议,巡检机器人可通过该控制协议访问云台控制系统功能,此外本文所述云台控制系统也支持其它标准云台控制协议,如:PELCO_D、PELCO_P等,因此其也可应用于一般安防监控领域。控制系统私有协议帧格式如图4所示。

图4 云台控制协议帧格式
图4所示帧长度固定为9个字节,其中: SYN字节为同步字节,以指示协议的开头;ADR为地址字节,用以支持总线上的多个云台的识别;C1和C2节为功能字节,该字节表明当前云台需要完成的要功能;D1至D4为数据字节,包含了功能所需的标志或参数;CHK字节为校验字节。
3.2 控制算法设计
云台控制主要是对云台运行速度和姿态的控制。由于无速度反馈,因此云台运行速度控制为开环控制,水平和垂直运行速度直接由PWM脉宽占空比给出,而云台姿态控制则需要根据水平和垂直方向上的角度反馈闭环进行。为精确的控制云台姿态,文本使用了PID控制方法,其离散的PID控制律为

式中:u(k)为k时刻控制器的输出量;KP、KI、KD分别为比例系数、积分系数和微分系数;e(k)为当前时刻的云台水平(垂直)方向当前角度值与期望值之差;e(k-1)为上次采样时刻的云台水平(垂直)方向角度值与期望值之差。
在PID控制中,积分环节的作用是消除稳态误差,提高系统的控制精度。对于本控制系统,由于直接利用角度偏差进行控制,角度偏差在控制开始阶段较大,如果此时引入积分环节就会造成PID的积分累积,导致系统超调较大,不利于云台动作的稳定性。因此,本文针对控制系统的特点,采用了积分分离PID控制,控制算法的执行流程如图5所示。

图5 控制系统积分分离PID计算流程
图5中当系统偏差e(k)绝对值大于ε(设定的偏差阈值)时,取消积分环节,采用PD控制,避免由于积分累积引起系统较大的超调;当e(k)小于等于ε时,引入积分环节,采用PID控制,以消除稳态误差,提高控制精度。积分分离PID控制算法可表示为

式中,α为积分项的开关系数,当|e(k)|>ε时取1,否则取0。
3.3 控制软件设计
对云台运行过程分析可知,云台角度采样和电机控制是控制系统始终需要关注的核心功能,与其相关的代码应由系统周期性地执行。另一方面,控制系统也需要处理一些随机性事件,如:与外部通信、异常事件输入等。为此云台控制系统采用了基于时间和事件触发的混合式系统架构,一个周期性执行的系统任务完成电机控制、角度采样、系统状态采集等功能,而其它随机性事件则交由各自的中断处理例程处理。控制软件主要包含采样控制程序和通信解码程序,其程序执行流程如图6所示。
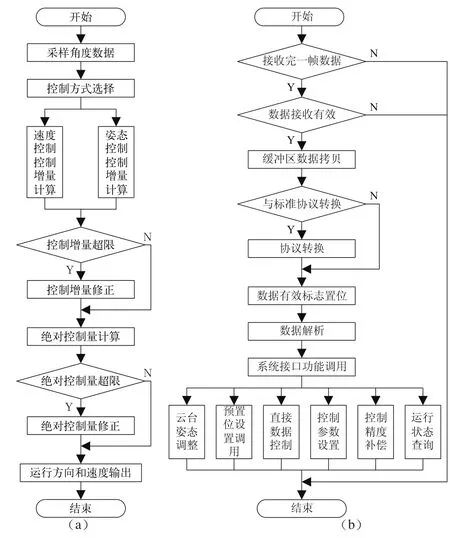
图6 控制系统的核心功能软件流程图
图6(a)所示流程中,考虑到云台 “速度控制”为开环控制,而“姿态控制”为闭环控制,两种控制量增量的计算方式不同,程序流程中对此进行了判断并分别处理;为了保证云台平稳精确的运行,需要对系统运行的加速度和速度进行限制,在程序流程中是通过对控制量增量和绝对控制量的限制予以实现。在具体实现上,由单片机定时器产生一个周期性的定时器中断,本程序流程代码在中断处理程序中执行。图6(b)为由串口中断接收完一帧数据后的解码执行流程,其主要完成了数据校验、缓冲区数据拷贝,协议转换和系统功能调用功能。
4 实验
本实验主要目的是验证云台控制精度,防止因控制精度不够导致的云台姿态不准的情况。实验中先将装有可见光摄像机的云台固定于云台底座上;之后调整云台姿态,使摄像机对准预先安放标志物并设定预置位(为便于后续计算,此时的摄像机处于水平位置),同时采集摄像机图片并记录此时的水平和垂直角度AD采样值分别为3105和1945;然后再控制云台使摄像机偏移后再调用该预置位,当云台运行到位后再次读取角度AD采样值并与之前采样值相减,取绝对值后得到控制误差。连续测试5次后采集到得数据如表1所示,测试中使用了三星SDZ-375摄像机,其镜头与标志物距离为17m,采集图像由摄像机放大37倍。
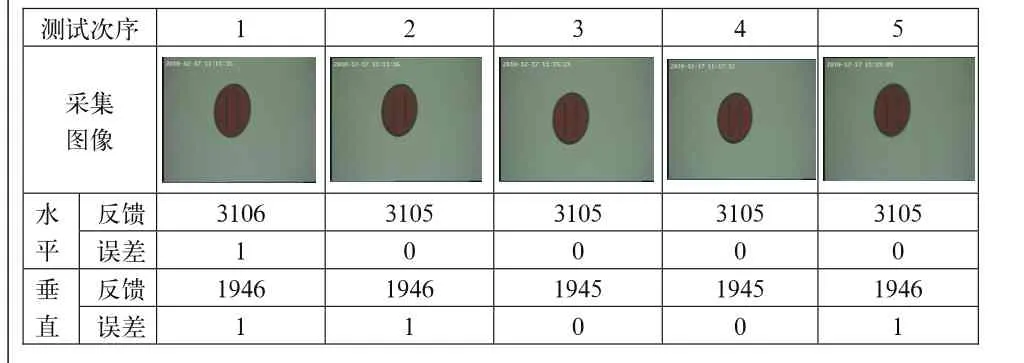
表1 云台控制精度测试
从上面得到的结果看,各个图像偏离程度基本一致,且得到的控制误差基本一致,其1个AD采样单位的跳动(AD采样值变化1)为AD量化误差(系统误差),由此可知云台控制可以达到较高的精度。
5 结论
综上所述,本文设计的云台控制系统控制精度良好,云台姿态准确,可以完全满足巡检机器人对云台性能的要求。另外云台控制系统结构简单、运行可靠,保证了巡检机器人可靠高效的完成巡检任务,同时得益于模块化的控制软件设计,系统软件升级方便,可以更好的适应今后巡检机器人系统对云台系统提出的不同种类的需求。
[1]鲁守银,钱庆林,张斌,等.变电站设备巡检机器人的研制[J].电力系统自动化,2006,30(13):94-98.
[2]李向东,鲁守银,王宏,等.一种智能巡检机器人的体系结构分析与设计[J].机器人,2005,27(6):502-506.
[3]Atmel Corporation.ATmega128 Datasheet[DB/OL].Revision V,updated 2/11.
[4]Texas Instruments Corporation.TLC2543 Datasheet[DB/OL].2001.
[5]National Semiconductor Corporation.LMD18200 Datasheet[DB/OL].2005.
