基于混合控制策略的光伏电池模拟器
2012-08-15李媛
李 媛
(四川大学电气信息学院 成都 610065)
1 引言
在光伏发电系统的实际开发过程中,使用光伏电池进行现场测试受季节、天气和地理环境的限制;并且光伏电池输出的变化完全依赖外界温度和光强,测试过程中不能随意改变,因此使用光伏电池进行测试费时费力,具有诸多不便;另外,光伏电池价格昂贵,使光伏发电系统调试成本增加。光伏电池模拟器正是为了克服上述问题而提出的,它可以在实验室环境下模拟光伏电池在不同的环境温度和光照条件下的输出电流-电压(I-U)特性,为光伏发电系统独立运行、并网运行和最大功率点跟踪等各种功能的测试提供了平台。
目前光伏电池模拟器实现方法包括以下几类:①采用线性模拟电路放大一个真正的光伏单元(PV Cell)的输出电流和电压[1-3]。该方法常见于研制初期阶段,如需模拟不同光伏电池特性,必须更换样品光伏单元。此外,随机箱内局部“环境温度”及光伏单元P-N结温的增加,其输出误差大大增加[4]。②建立光伏电池等效电路,采用线性元件模拟光伏输出I-U特性[5-7]。采用该思路建立的等效电路往往较为复杂,并且单个电路模块输出功率较小,若要获得较大输出功率,需要采用多模块并联的形式实现。③使用功率变流器,通过数字控制的方式令其输出符合光伏电池的 I-U特性曲线[8-11]。该方法实施原理简单,可以模拟任意光强、温度下任意光伏电池的输出特性。随着电力电子、计算机控制及数字技术的成熟,采用该方法实现模拟器变得越来越经济和快速。
利用功率变流器实现光伏模拟器时多采用Buck电路,此外也有利用电压型全桥逆变带高频变压器隔离来实现DC-DC变换的拓扑[4,12]。光伏模拟器的工作点位于光伏输出I-U特性曲线与负载特性曲线的交点处,其数字控制的基本思路如图1所示,通过数字采样环节采集主电路输出电流和电压,在控制器中经曲线拟合或查表的方式找到光伏模拟器工作点,将实际输出与工作点比较获得输出误差,经控制器计算得到开关占空比,生成 PWM脉冲触发主电路开关器件,使主电路输出工作点电流和电压,达到模拟光伏输出特性的目的。
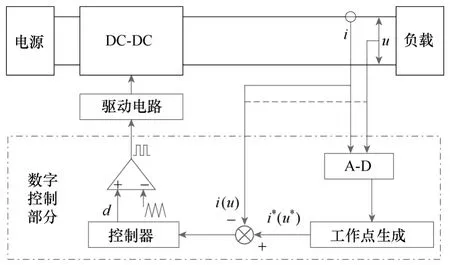
图1 光伏模拟器数字控制原理框图Fig.1 Block diagram of the digital control for PV simulator
由于光伏电池输出具有非线性,在重载时相当于电流源,而轻载时趋近电压源,单纯靠检测输出电流并作电压闭环控制的方式无法实现对光伏电池输出特性的全段模拟。因此,常见控制方法选择了通过检测到的负载电流和电压,计算实时负载电阻,根据阻值查表确定光伏模拟器工作点的电流(或电压)参考值,采用闭环反馈的方式控制输出[13-15]。这要求控制器持续进行除法运算,增加了计算复杂性,对控制器性能要求较高。另外也有文献根据测量输出电压找到工作点电流参考值,再经闭环反馈控制输出电流[16,17]。该方法需外加开路电压限制环节,当空载时转为控制输出电压;并且在模拟器轻载时受电压测量精度的影响,导致输出电流不稳。为了克服上述问题,一些文献采用了其他改进控制方式,如修正测量电阻并对输出电流进行搜索控制[18]等。
本文将基于光伏电池输出特性数学模型,对光伏电池模拟器的动态调节过程进行详细分析,从理论上证明分段实施电流控制和电压控制的可行性,找到输出特性性能临界点。基于此提出光伏电池模拟器的混合控制策略,在绝大多数工作范围内可避免实时计算负载电阻,并可消除输出振荡,获得平稳的输出特性。最后将通过一个2kW的光伏电池模拟器样机试验,实现对光伏电池阵列在不同光强、温度、负荷下的输出特性的模拟,通过分别连接并网逆变器和可变电阻性负载的测试,验证该混合控制策略的有效性及其良好的动态性能。
2 数学模型及动态控制过程分析
2.1 光伏电池输出特性数学模型
根据光伏电池外特性等效电路,光伏电池的输出I-U曲线可由下式给出:

式中,IPV、UPV分别为光伏电池输出电流和电压;Np、Ns分别为光伏模块并联和串联的数量;Iph为单个光伏模块的电流(photo current),与光强(W/m2)、光照表面积(m2)成正比;Irs为二极管饱和电流;K为波尔兹曼常量,K=1.38×10-23J/K;q为电子电荷,q=1.6×10-19C;T为PN结温度。
为简化分析,可将式(1)改写为

式中,K1=NpIrs>0;K2=q/KTANs>0;K3=NpIph>0。
可见当环境温度和光照强度确定时,K1~K3为常量,光伏电池相应地工作在一条固定的I-U曲线上;而当环境温度和光照强度变化时,K1~K3以及相应I-U特性曲线将发生改变。
2.2 电压闭环控制动态过程分析
本节将以电压闭环控制为例,详细分析光伏模拟器的动态调节过程,电流闭环控制的分析与此类似。图2为模拟器工作点的局部放大图,其中实线为光伏模拟器输出曲线,虚线为负载特性曲线,它们的交点为系统工作点。定义 KPV为光伏特性曲线在工作点处切线的斜率,KR为负载特性曲线斜率。

图2 光伏电池模拟器工作点分析Fig.2 Analysis for the PV simulator operating point
设仿真器初始负载为R1,初始工作点为A,某一时刻负载变化到 R2,由于 DC-DC输出端连接滤波电容,仿真器的输出电压不会突变,因此此时系统的工作点由A移动到B。控制器检测到B点的电流 IR2+ΔI1后,查表得到电压参考指令 UR2-ΔU2(C点),通过电压控制环调整PWM信号,控制输出电压。由此,经过一次控制器调整后,系统的工作点移到 D。可以写出ΔU1、ΔU2、ΔI1和ΔI2之间的关系为
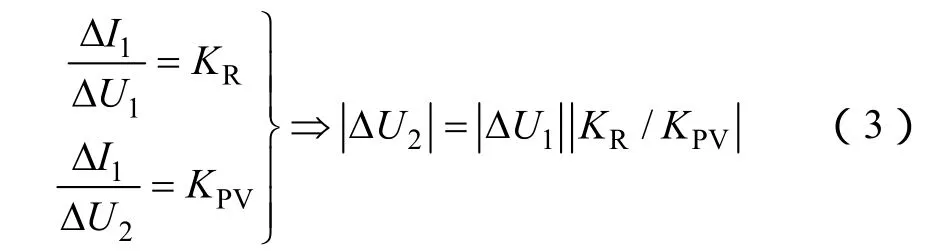
注意到ΔU1和ΔU2为调整前后暂时的系统工作点(B,D)到稳态工作点(E)的电压差,可见比值|KR/KPV|在调整过程中起到关键作用:若|KR/KPV|<1,可得|ΔU2|<|ΔU1|,那么经过几次调整后,仿真器输出将收敛于 E 点;若|KR/KPV|>1,|ΔU2|>|ΔU1|,调整后的工作点反而偏离稳态更远,这表明此时采用电压闭环控制法系统的工作点无法收敛到 E。以上是基于负载变化时光伏模拟器电压闭环控制动态过程的分析,同样适用于负载没有变化时由于某微小的扰动而使仿真器工作点偏离A点,闭环控制器重新调整后使系统工作点返回至A的过程。由式(2)可得光伏特性曲线工作点切线的斜率为

而负载特性曲线的斜率可表示为

由式(4)和式(5),可得|KR/KPV|=1时对应的负载为

式中,RC为临界电阻。
由此可见,比值|KR/KPV|的大小由模拟器外接负载的等效阻抗RLoad和临界阻抗RC间的关系确定

这表明只有在RLoad>RC的情况下,采用电压闭环控制的方法才可使光伏模拟器收敛于负载曲线和光伏特性曲线的交点上;而当RLoad<RC时,电压闭环控制的方法无法达到稳态工作点,这时需采用电流闭环控制的方法。
2.3 临界阻抗及临界点的确定
已知负载曲线和光伏特性曲线的交点同时满足以下关系式:
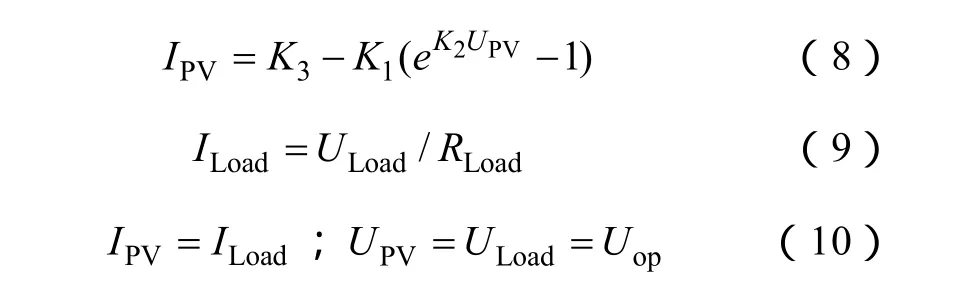
式中,UOP为光伏仿真器的稳态工作点。
由此可得

将上式代入式(6)可得临界阻抗 RC对应的工作点满足

因此,可通过K1,K2,K3确定UOP,进而计算出对应光伏特性曲线的临界电阻RC。
进一步分析不难发现,光伏电池输出功率为

故其在最大功率点处满足

对照式(12),可见光伏电池输出的最大功率点正好为临界电阻RC和光伏曲线的交点。由此可得,最大功率点将光伏曲线划分为两段:RLoad>RC时,|KR/KPV|<1,电压闭环控制法适用;RLoad<RC时,|KR/KPV|>1,电流闭环控制法适用,如图3所示。
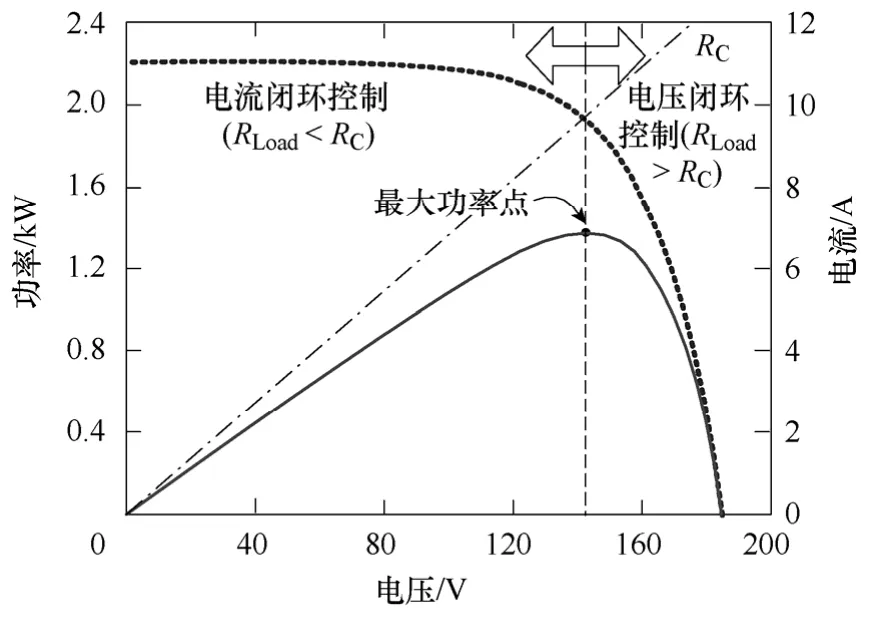
图3 临界电阻及最大功率点将控制划分成两段Fig.3 Critical resistance and the maximum power point divide control into two segments
3 光伏电池模拟器的混合控制策略
基于以上分析,本文提出光伏电池模拟器的混合控制策略,将光伏特性曲线按负载电阻的大小划分为三段,对每一段曲线采取不同的控制措施,如图4所示。
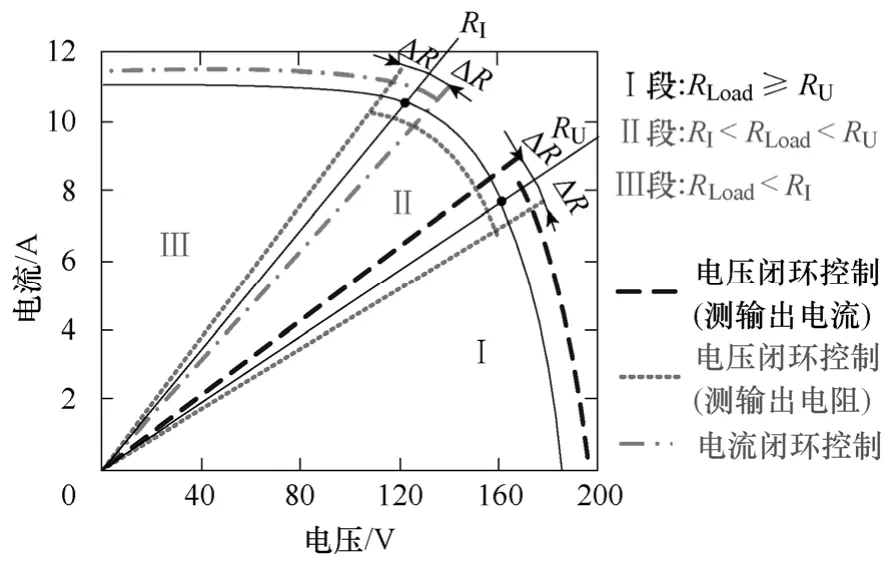
图4 光伏电池模拟器的混合控制策略Fig.4 Hybrid control strategy for the PV simulator
Ⅰ段(RLoad≥RU):采用电压闭环控制方法,控制器检测到仿真器输出电流后,查电流-电压表获得电压参考指令,将其与当前输出电压比较获得电压误差;通过PI补偿器计算得PWM输出,控制模拟器输出电压为参考指令值。
Ⅱ段(RI<RLoad<RU):采用电压闭环控制方法,此时控制器同时检测仿真器的输出电流和电压,计算出输出电阻,查电阻-电压表获得电压参考指令,将其与当前输出电压比较获得电压误差;通过 PI补偿器计算得 PWM输出,控制仿真器输出电压为参考指令值。在此段用输出电阻查电压指令的原因在于,RLoad=RC时|KR/KPV|=1,因此若仍用Ⅰ段的控制方法系统会出现振荡(|ΔU1|=|ΔU2|);同样,若采用电流闭环控制也有相同的问题。因此在光伏曲线的小范围内仍需进行实时负载计算,采用测量输出电阻查表的方法获得相对固定的参考指令。
Ⅲ段(RLoad≤RI):采用电流闭环控制方法,控制器检测到仿真器输出电压后,查电压-电流表获得电流参考指令,将其与当前输出电流比较获得电流误差;通过PI补偿器计算得PWM输出,控制仿真器输出电流为参考指令值。
其中RI、RU为混合控制策略中的分段电阻,分布于RC两侧。同时,为了避免模拟器工作点位于混合控制策略区段边界时出现控制方法频繁切换,造成系统振荡或不稳定的问题,分别在两个区段边界设置了缓冲区:RU±ΔR,RI±ΔR;当工作点位于缓冲区时,控制器将按照其进入缓冲区以前的控制方法进行控制,类似于滞环调节过程。RI、RU及ΔR的取值需综合考虑计算强度和输出性能后确定,另外还与电压、电流采样精度有关。采样精度越高,II段范围越小,也即 RI、RU越靠近临界电阻 RC,ΔR也越小。实验中可在在模拟器输出不发生振荡的前提下,尽量缩减Ⅱ段区域以减小计算量。
4 实验系统及测试结果
4.1 实验电路及控制器实现
本文中光伏电池模拟器主电路采用Buck结构,如图5所示。硬件电路由直流电压源(二极管整流加大电容滤波)、Buck斩波电路、DSP控制器、驱动电路和辅助电源等部分构成。将该光伏模拟器与并网逆变器连接,通过调节并网逆变器功率,可逐点测试光伏模拟器的输出;另外,将其与可变电阻连接,可测试该光伏模拟器在负载阶跃变化时的动态响应。其中 Buck电路输出滤波器参数:CPVS=2.3mF,LPVS=1.2mH,开关频率为 13.33kHz。DSP控制器基于 16位TMS320LF2407芯片实现,包括采样、A-D转换、通信接口等外围电路。DSP控制器由隔离辅助电源供电,由霍尔传感器采集主电路的输出电压和电流,另外采用光纤发送PWM信号,实现了控制器与系统主功率回路的电气隔离。根据要模拟的光伏电池在不同环境温度和光照强度下的特性曲线,离线计算出一组电流-电压特性表,存储在DSP的闪存中。DSP控制器通过A-D检测DC-DC输出电流和电压,通过查表的方式获得参考指令,并由闭环控制使 DC-DC电路输出符合光伏特性曲线的相应电压或电流。另外,还利用通信接口向DSP发出指令,改变DSP查询的表单,以模拟温度、光强变化时不同的光伏输出特性。
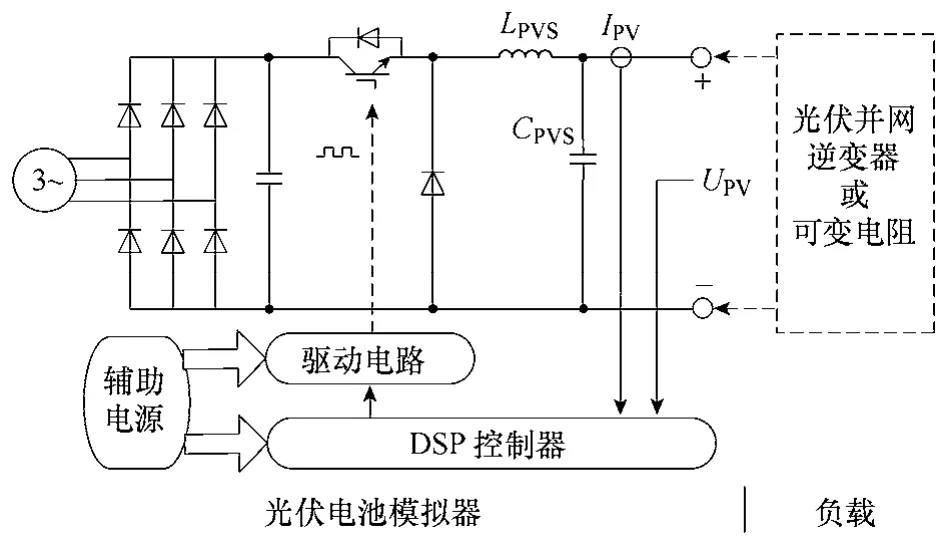
图5 光伏电池模拟器拓扑及测试结构Fig.5 Topology and testing configuration of the PV simulator
4.2 实验测试结果
实验模拟sm-60(Samsung, 50W)阵列(4模块并联,9模块串联)分别在 100%、87%和 74%单位光照强度下的运行曲线。输出电压范围为0~190V,输出电流范围为 0~15A。每条曲线的最大功率点分别为 PMPP=1.94kW(UMPP=148.5V,IMPP=13.1A);PMPP=1.65kW(UMPP=148.5V,IMPP=11.3A)和PMPP=1.38kW(UMPP=142.2V,IMPP=9.7A)。每种情况下计算出的临界电阻分别为11.3Ω、12.8Ω 和14.7 Ω。
在光伏电池模拟器接并网逆变器的实验中,并网逆变器采用入网电流控制方式,可将其视为恒功率负载。调节入网电流指令,入网功率改变,因此模拟器工作点将随输出功率的改变在光伏特性曲线上移动。实验测试的工作点如图6所示。
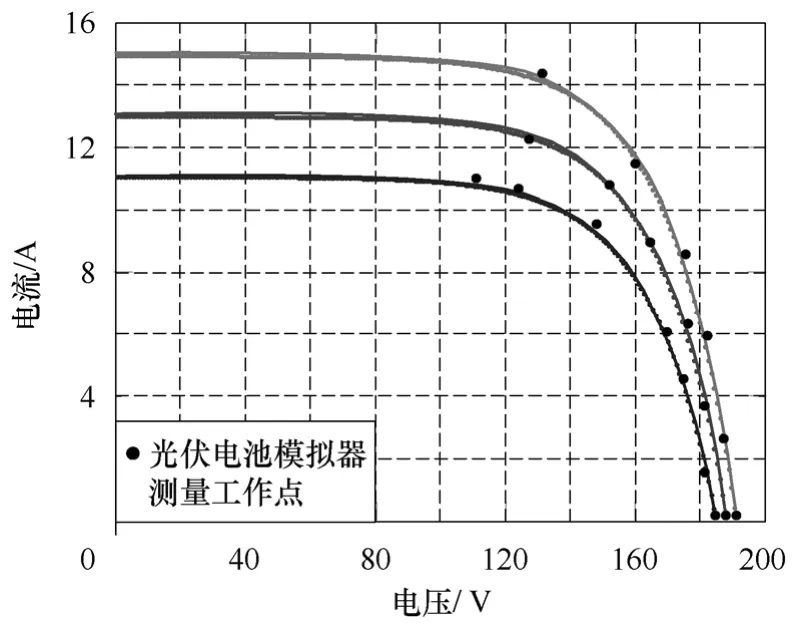
图6 光伏电池模拟器实验测量工作点Fig.6 Tested operating points of the PV simulator
为了验证文中所述的混合控制策略,将光伏电池模拟器连接至可变电阻负载,测试其动态响应。如前文所述,当负载仅在Ⅰ段、Ⅱ段或Ⅲ段段内变化时,控制器闭环控制方法不发生改变。而当负载在三个工作区段之间切换时,控制器将改变闭环控制方法。本文给出负载在工作区段间切换时的实验结果,负载在同一区段内变化的实验结果与此类似,只是由于切换时初始误差较小,过渡时间更短。图7为负载在Ⅰ段和Ⅱ段切换时的实验波形,图8为负载在Ⅱ段和Ⅲ段切换时的实验波形。模拟的光伏输出最大功率点为UMPP=142.2V,IMPP=9.7A,对应临界电阻 RC=14.7Ω。实验中取 RI=12.5Ω,RU=17Ω,ΔR=1Ω。由图可见当负载在三个区段变化时,混合控制策略能快速响应,调整光伏电池模拟器的输出使其与光伏特性曲线一致,其输出波形平稳,未出现振荡现象。特别负载为 11.4Ω 时位于Ⅱ段和Ⅲ段临界位置,从实验结果看来控制器仍能保持稳定输出。

图7 负载在Ⅰ段和Ⅱ段切换时的动态响应Fig.7 Dynamic response when load switches between sectionⅠandⅡ
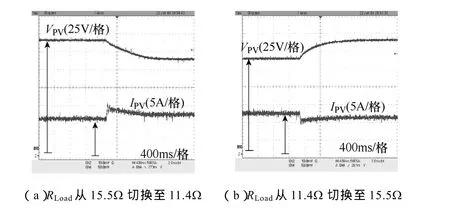
图8 负载在Ⅱ段和Ⅲ段切换时的动态响应Fig.8 Dynamic response when load switches between sectionⅡand Ⅲ
5 结论
本文基于光伏电池I-U特性曲线的数学模型,以电压闭环控制过程为例分析了模拟器做电压闭环控制时的动态调节过程,得到对应于特性曲线最大功率点的临界电阻,推导出电压闭环控制的有效范围为 RLoad>RC,当 RLoad<RC时则应采用电流闭环控制的方法来实现光伏输出模拟,并由此提出光伏电池模拟器的混合控制策略。根据文中所述方法对光伏电池模拟器进行测试,通过分别连接并网逆变器和可变电阻性负载,验证了该控制策略的有效性及其良好的动态性能。该混合控制策略仅在小工作范围内实施除法运算,易于实现。测试结果表明该方法可很好地模拟光伏电池阵列在不同光照和温度下的工作情况,获得平稳的输出特性。
[1]Midtgard O M.A simple photovoltaic simulator for testing of power electronics[C].2007 European Conference on Power Electronics and Applications,2007: 1-10.
[2]Nagayoshi H.I-V curve simulation by multi-module simulator using I-V magnifier circuit[J].Solar Energy Materials & Solar Cells, 2004, 82(5): 159-167.
[3]沈玉.跟随样品太阳电池的光伏阵列模拟器[J].太阳能学报, 1997, 18(4): 448-451.Shen Yu.A photovoltaic array simulator[J].Transaction on Solar Energy, 1997, 18(4): 448-451.
[4]苏建徽, 余世杰, 赵为, 等.数字式太阳电池阵列模拟器[J].太阳能学报, 2002, 23(1): 111-114.Su Jianhui, Yu Shijie, Zhao Wei, et al.An investigation on digital solar array simulator[J].Transaction on Solar Energy, 2002, 23(1): 111-114.
[5]Khouzam K, Hoffman K.Real-time simulation of photovoltaic modules[J].Solar Energy, 1996, 56(6):521-526.
[6]Phani Kiranmai K S, Veerachary M.Maximum power point tracking: a PSPICE circuit simulator approach[C].Power Electronics and Drives Systems, International Conference, 2005, 2: 1072-1077.
[7]董博, 李永东, 王奎, 等.光伏电池模拟器的设计与研究[J].电源技术, 2010, 34(5): 460-463.Dong Bo, Li Yongdong, Wang Kui, et al.Design and research of solar array simulator[J].Power Source Technology, 2010, 34(5): 460-463.
[8]Ollila J.A medium power PV-array simulator with a robust control strategy[C].Control Applications,Proceedings of the 4th IEEE Conference, 1995:40-45.
[9]Lloyd S H, Smith G A, Infield D G.Design and construction of a modular electronic photovoltaic simulator[C].8th International Conference on Power Electronics and Variable Speed Drives, 2000: 120-123.
[10]Zeng Q R, Song P G, Chang L C.A photovoltaic simulator based on DC chopper[C].IEEE Canadian Conference on Electrical and Computer Engineering,Electrical and Computer Engineering, 2002, 257-261.
[11]Koutroulis E, Kalaitzakis K, Tzitzilonis V.Development of an FPGA-based system for real-time simulation of photovoltaic modules[C].7th IEEE International Workshop on Rapid System Prototyping, 2006: 200-208.
[12]宫鑫, 宋稳力.基于 TMS320F28335的光伏电池模拟器设计[J].电子元器件应用, 2008, 10(3): 13-15.Gong Xin, Song Wenli.Design of the photovoltaic simulator based on TMS320F28335[J].Electronic Component & Device Applications, 2008, 10(3): 13-15.
[13]Guo Q.Design and development of a computercontrolled PV array simulator [J].Semiconductor Photonics and Technology, 2010, 16(2): 112-119.
[14]杨鹏, 刘松, 沈楚焱.一种数字式光伏阵列模拟系统的研究[J].电工电气, 2011, 1(2): 11-14.Yang Peng, Liu Song, Shen Chuyan.Research on a kind of digital solar array simulator[J].Electrical Technology, 2011, 1(2): 11-14.
[15]韩朋乐, 黄建国.数字式光伏阵列模拟器的设计研究[J].电子元器件应用, 2009, 10(11): 51-54.Han Pengle, Huang Jianguo.Design and research on the digital photovoltaic array simulator[J].Electronic Component & Device Applications, 2009, 10(11): 51-54.
[16]郑鹤玲, 葛宝明, 毕大强.基于 RT-LAB的光伏发电系统实时仿真[J].电工电能新技术, 2010, 29(4): 62-66.Zheng Heling, Ge Baoming, Bi Daqiang.RT-LAB based real-time simulation of photovoltaic power generation system[J].Advanced Technology of Electrical Engineering and Energy, 2010, 29(4):62-66.
[17]徐鹏威, 杜柯, 刘飞, 等.光伏电池阵列模拟器研究[J].通信电源技术, 2006, 23(5): 5-8.Xu Pengwei, Du Ke, Liu Fei, et al.Research on PV array simulator[J].Telecom Power Technologies,2006, 23(5): 5-8.
[18]宋平岗.再生能源系统中太阳能电池仿真器的研究[J].电力电子技术, 2003, 37(4): 42-44, 41.Song Pinggang.Research on photovoltaic simulator in renewable energy system[J].Power Electronics, 2003,37(4): 42-44, 41.