初级永磁型游标直线电机设计与静态特性分析
2012-08-15邹国棠
杜 怿 程 明 邹国棠
(1.东南大学电气工程学院 南京 210096 2.江苏大学电气信息工程学院 镇江 212013 3.香港大学电机电子工程系 香港)
1 引言
随着能源危机和环境问题的日益凸显,可再生能源的开发利用正呈现加速发展的趋势。海浪能以其资源总量大、环境污染低和可持续性强等特点受到了人们的普遍关注。传统海浪能发电系统大多借助液压、气动等机械装置,先将海浪的直线往复运动转换成旋转运动,然后驱动传统旋转发电机进行能量转换[1],必要时还需采用机械齿轮进行调速,以满足高速发电机的运行需求。由于使用了大量的中间转换环节,传统海浪能发电系统不可避免地存在机械损耗大,功率密度低,可靠性差和需要定期维护等缺点。直驱式海浪发电系统直接利用海浪的直线运动驱动直线发电机,取消了传统发电系统中的直线-旋转变换装置,简化了系统的结构,从而系统的可靠性、效率和功率密度都能得到相应的提高和改善[2]。目前,国内外学者对直驱式海浪发电机的研究主要集中于永磁同步直线电机(Linear Permanent Magnet Synchronous Machine,LPMSM)[3-5],也有开关磁阻直线电机(Linear Switched Reluctance Machine,LSRM)的相关报道[6]。然而,由于海浪的起伏速度仅为0.5~2m/s,导致由海浪直接驱动的直线电机运行速度较低,所以直驱式海浪发电机本身往往存在体积大、功率密度低、制造成本高、不利于运输和安装等问题。事实上,在确定的功率和速度情况下,电机的体积与电机能产生的转矩/力密度有直接关系[7],因此设计低速、大推力直线电机成了改善直驱式海浪发电系统性能的关键技术之一。
横向磁通永磁(Transverse Flux Permanent Magnet,TFPM)电机是一种新型永磁电机,具有很高的推力密度[8],并被许多学者认为是直驱式系统的首选电机之一。然而,TFPM电机所特有的三维拓扑结构和磁路大大增加了电机设计和制造的难度,同时也限制了传统叠片技术在该电机中的应用。文献[9]提出了一种新型同轴式结构的磁齿轮,利用调磁环的调制作用产生波长长、运行速度快的谐波磁场(本文中将这种现象称为磁齿轮效应),实现机械能在齿轮初级和次级之间进行无接触、高效地变速传输。在此基础上,文献[10-12]将一台外转子高速无刷直流电机和一台磁齿轮整合在一起构成磁齿轮复合永磁(Magnetic-Geared Permanent Magnet,MGPM)电机,同时实现了高速电机设计与控制和低速、大转矩输出。但由于该电机具有三层气隙和两个旋转部分,给电机设计与制造增加了难度。游标电机[13]利用定子齿凸极对磁场进行调制,通过产生的高速谐波磁场实现电机的低速、大转矩输出,但该电机的永磁体位于电机转子,给永磁体的冷却带来较大的困难,容易在高温工况发生不可逆退磁,并破坏了电机转子的整体性,降低了电机的可靠性。文献[7]提出的游标混合(Vernier Hybrid,VH)电机中,永磁体和绕组均被安装于电机定子,利用电机转子凸极改变气隙磁阻以提高电机的转矩密度,克服了传统永磁游标电机的缺点,文献[14]利用三个单相VH电机错开120°电角度的组合方式,构成一个三相直线电机,获得了较高的推力密度,但该结构大大降低了电机初级的牢固程度,其采用的集中绕组方式,则大大降低了“磁齿轮效应”变速效果。
本文提出一种新型初级永磁型游标直线(Linear Primary PM Vernier, LPPMV)电机,在详细分析该新型电机工作原理的基础上,利用等效磁路法给出了该电机的功率尺寸方程[15],为电机的初步设计提供了一种有效方法和思路,并利用有限元方法(Finite Element Method,FEM)研究了电机的空载磁链、感应电动势、电感、定位力和推力等静态特性,理论分析和样机实验结果验证了设计方案的有效性和正确性。
2 电机结构
本文对一台三相6/2极LPPMV电机展开研究,图1为其截面图。电机初级由硅钢冲片叠成的初级铁心、三相电枢绕组以及永磁体组成。为了便于绕线,初级铁心采用半闭口槽设计,永磁体贴装于初级齿表面。电机次级仅由带有凸极的硅钢冲片叠成,既无永磁体,也无绕组,因此,电机次级具有较高的机械强度,十分适合运行于大推力工况。

图1 6/2极LPPMV电机截面图Fig.1 The cross-section of the 6/2-pole LPPMV machine
虽然新型 LPPMV电机外形上与磁通反向永磁(Flux Revesal Permament Magnet,FRPM)电机[16]十分相似,但两者的运行原理和设计方法却完全不同。LPPMV电机的次级凸极铁心形成交替变化的气隙磁导,利用该磁导与永磁磁通的相对运动,调制出快速运行的谐波磁场,以提高电机的空载感应电动势和电磁推力密度,属于变磁阻永磁(Variable Reluctance Permanent Magnet,VRPM)电机的一种。考虑到永磁体的磁导率与空气近似相等,取相邻两个初级齿极靴之间的空隙宽度与永磁体宽度相等,相邻两个初级齿上靠近的两块永磁体充磁方向相同,以便在气隙中产生正弦的永磁磁通。
3 运行原理
为清楚说明新型 LPPMV电机的运行原理,本文采用等效磁路法对电机的气隙磁通密度进行详细地推导,并以此得到电机的功率尺寸方程。为了简化推导过程,本文做了一些必要的假设:
(1)铁心的磁导率为无穷大。
(2)永磁体的相对磁导率为1。
(3)磁场仅在y方向发生变化,如图2所示。
(4)忽略漏磁。
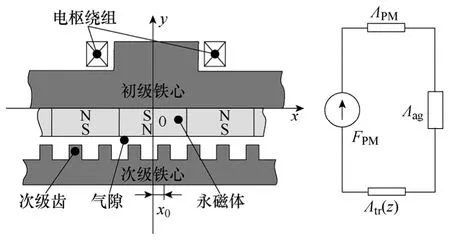
图2 LPPMV电机的等效磁路模型Fig.2 Model and equivalent magnetic circuit of the LPPMV machine
3.1 气隙磁通密度
现代永磁体钕铁硼的退磁曲线呈线性变化,其第二象限的特性可以认为是一条直线[17],因此,永磁体可以等效成一个恒磁动势源FPM与一个恒定的内磁导ΛPM相串联的磁动势源,在此基础上得到如图2所示的LPPMV电机的等效磁路模型。其中,电机磁路单位面积上的总磁导可以表示为

式中,ΛPM,Λag—永磁体和气隙单位面积磁导;
Λtr(x,t)—由电机次级的齿槽形成的单位面积磁导,它是一个关于位置x和时间t的函数;
hPM—永磁体厚度;
hag—气隙厚度;
μ0—真空磁导率。
根据式(1)和上述假设,Λ(x,t)可以用图 3来表示,并可以分解为傅里叶级数形式

图3 电机总磁导波形Fig.3 Magnetic permeance waveform
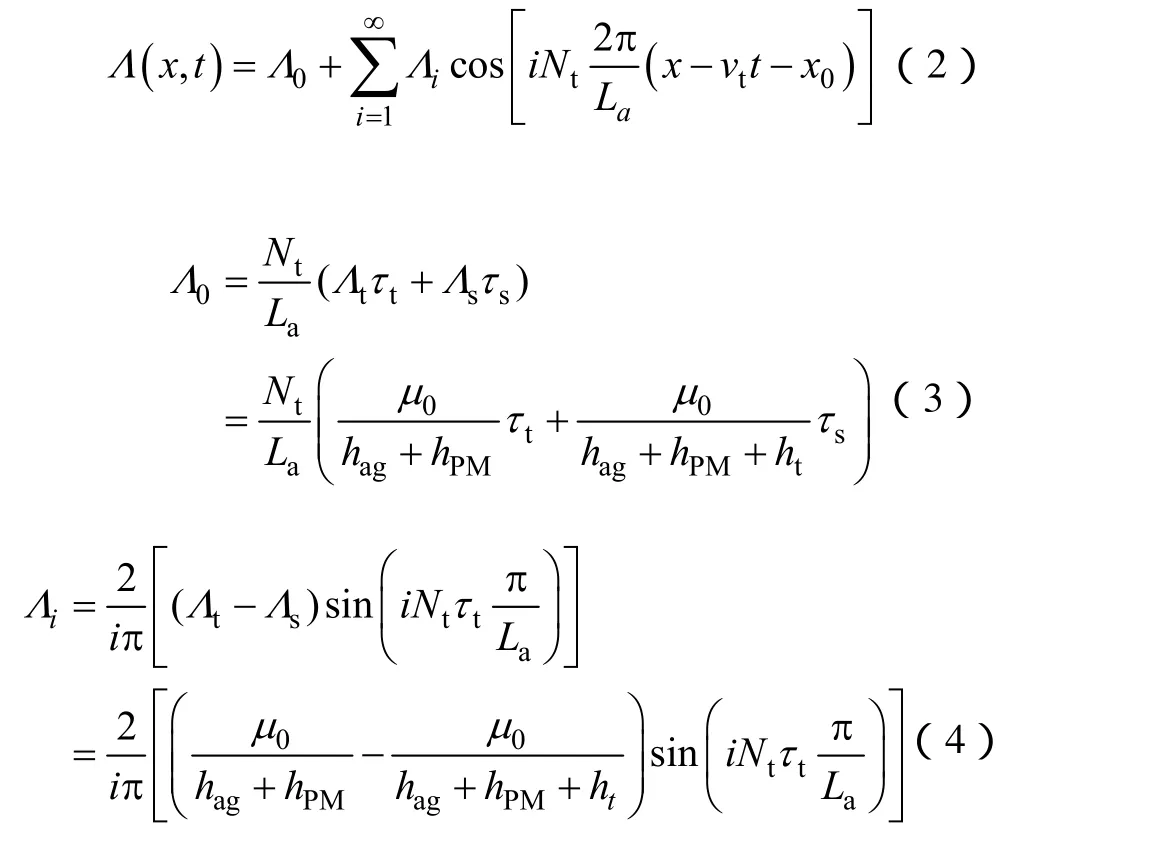
式中 Λ0—磁导中的直流分量;
La—电机初级长度;
vt—次级的运动速度;
x0—次级初始位置;
Nt—次级有效齿数;
Λt,Λs—次级齿和槽范围内的磁导;
τt,τs—次级齿和槽的宽度;
ht—次级齿高。
此外,贴装于初级齿表面的永磁体产生的磁动势FPM也可以使用傅里叶级数的形式表示为

式中 Br—永磁体剩磁;
pPM—永磁磁通的极对数。
忽略高次谐波的影响,仅考虑式(2)和式(5)的直流和基波分量,则电机空载气隙磁通密度 Bag可近似表示为

式(6)中的第一项由永磁体直接产生,由于LPPMV电机中永磁体贴装于初级齿表面,因此,该分量并不随电机次级的运动发生变化,所以不能在电枢绕组中产生感应电动势;第二项和第三项均由永磁磁通经次级凸极调制产生,其中前者所表示的磁通波长短,运行速度慢,而后者则具有波长长,运行速度快的特点,根据电机学原理,电机的感应电动势幅值和频率与磁通的变化速度呈正比,因此选择第三项作为 LPPMV电机有效谐波分量,有利于提高电机的感应电动势,进而提高电机的推力密度。由式(6)分析可得有效谐波磁通的极对数pflux和运行速度vflux的关系为
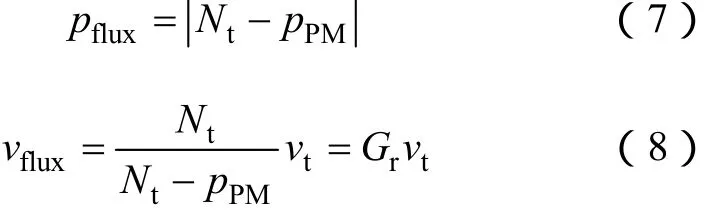
由式(7)可见,与普通电机不同,新型LPPMV电机中同时具有次级凸极齿数Nt、永磁体产生的永磁磁通极对数 pPM和有效谐波磁通极对数 pflux三个参数,且通常三者均不相等,本文所研究的 6/2极样机的定子齿数为6,有效谐波磁通极数为2。由式(8),有效谐波磁通的运行速度较次级运行速度放大 Gr倍,Gr称之为磁齿轮变比。此外,当 Nt>pPM时,vflux和vt同向,反之,则反向。为了获得最大限度的放大倍数,通常取 pflux=1,电枢绕组则可以按照该有效谐波磁通的极对数进行绕制(这也是该新型电机与FRPM电机结构上的最大区别所在),此外需要将次级凸极数设计的尽可能的大,但另一方面,永磁体之间的极间漏磁会随着 Nt增大而变大,因此需要综合考虑之后选取合适的Nt。
由式(6)还可知,有效谐波磁通密度的幅值跟Λ1的幅值成正比,因此可以通过增大Λ1实现增加有效气隙磁通密度的目的。由式(4)不难发现,有两种方法可以提高Λ1幅值:
(1)增加次级凸极高度 ht,以增加Λt和Λs之间的差值。
(2)设计次级凸极齿和槽的宽度比为 1,即τt=τs。
3.2 功率方程
新型 LPPMV电机利用运行速度较快的磁场谐波作为励磁,因此可以将 LPPMV电机看成一台具有接近正弦感应电动势波形的普通PMSM,控制电枢中的电流为正弦且与感应电动势保持同相以取得最大的电磁推力,从而最大限度地将机械能转换成电能。不考虑电枢电阻的条件下,其电磁功率P可以表达为
式中 T—感应电动势和电流的周期;
e(t),i(t)—感应电动势和电流瞬时值;
Em,Im—感应电动势和电枢电流的幅值。
假设电机单相永磁磁链为ψpPM,则单相感应电动势可以表示为

式中 ΦpPM—每相永磁磁通;
Nph—每相绕组匝数。
假设ΦpPM为正弦分布,且满足如下表达式

式中 τflux—有效谐波磁通的极距,且τflux=La/pflux/2;
Φm—每相永磁磁通峰值。
将式(11)代入式(10),可得

因此感应电动势的峰值满足
式中 kw—绕组系数;
kd—漏磁系数;
cs—初级齿极弧系数;
Bgmax—有效谐波磁通密度幅值;
Lw—电机宽度。
另一方面,每相正弦分布的电流峰值Im满足

式中 As—电机线负荷。
将式(13)和式(14)代入式(9),可以得到LPPMV电机的功率方程为

忽略电枢绕组的电阻,P为发电机的有功功率,由于采取了id=0的控制策略,电机电枢反应电抗所需的虚功由直流侧电源提供。此时电机的电磁推力可以表示为

可见,LPPMV电机的电磁推力与电机气隙面积以及磁齿轮效应的放大倍数Gr成正比。与普通永磁同步电机相比,虽然 LPPMV电机中使用的有效谐波磁通密度幅值要小的多,但只要确保 Bgmax与 Gr的乘积足够大,就能得到较高的电磁推力密度。
4 电机主要参数计算
根据以上分析,由式(15)可以得到 LPPMV电机的尺寸方程为
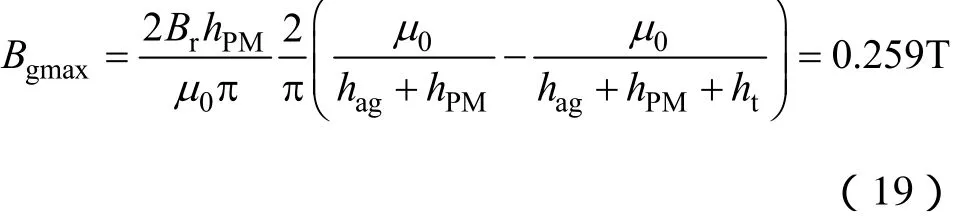
由于本文中初级齿数为6,相数m=3,取pflux=1,则每极每相槽数为1,按照整距进行绕制电枢绕组,绕组因数kw=1。每个初级齿上贴装5块永磁体,形成的永磁磁通极对数pPM=18,所以初级齿极弧系数cs=5/6,根据式(7),次级有效凸极数 Nt可以取为17或19,对应的磁齿轮效应放大系数Gr分别为17和 19。显然 Nt不同取值还将导致不同的漏磁系数kd,因此,其最终的取值取决于Gr和1/kd的乘积,而kd的取值与电机各尺寸都有密不可分的关系,需要使用有限元等数值计算方法,才能得到比较精确的值,根据下文的仿真比较,本文取 Nt=17,此时的漏磁系数 kd=1.724,该漏磁主要由永磁体极间漏磁造成。取次级齿高度 ht=10mm,气隙厚度 hag=1mm,另外,由式(5),调制前的气隙磁通密度基波峰值为

根据经验,设计Bg′max=1.2T。因此,由式(18)可以算出永磁体厚度hPM。由于LPPMV电机中电枢电流产生的磁通极对数远远小于永磁体极对数,即同一个电枢电流磁通极下包括了数块永磁体,因此永磁体很容易发生不可逆退磁,永磁体厚度不能太小,本文取hPM=4mm。
根据式(6)和3.1节的分析,可得
取 As=30 000A/m,当功率 P=1.6kW时,由式(17)可得

留有一定余量后,取 Lw=0.1m,La=0.36m。此时每块永磁体的宽度为0.01m。
要求空载感应电动势幅值为60V,根据式(13),可以算出电枢绕组每相匝数

为留有余量,取Nph=142。
5 静态特性
5.1 永磁磁链与感应电动势
使用二维有限元对所设计的6/2极新型LPPMV电机进行分析,得到电机空载永磁磁链和空载感应电动势与转子位置角的关系如图4和图5所示,表1为空载永磁磁链正负半周期的峰值。由于每个初级齿上的永磁体个数为奇数和三相绕组的布置方式存在差异等原因(即A相绕组的正边位于两个槽内,分别位于初级两侧的A1和A2,而B、C两相绕组的正负边都仅有一个槽,如图 1中 B-Y,C-Z,位于电枢的中部),导致B、C两相空载永磁磁链存在一个直流偏差,而A相的两套绕组结构使其直流偏差相互抵消,如图4和表1所示。但经过求导得到的三相空载感应电动势却非常对称,并且具有很好的正弦度,其总谐波失真度(Total Harmonic Distortion,THD)仅为3%,在额定速度1m/s时,空载感应电动势幅值为60V,与设计目标相符。
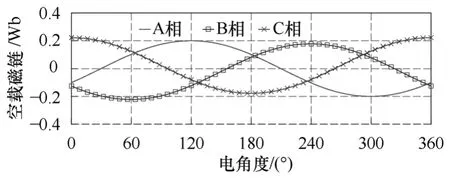
图4 三相磁链波形Fig.4 Flux linkage waveforms
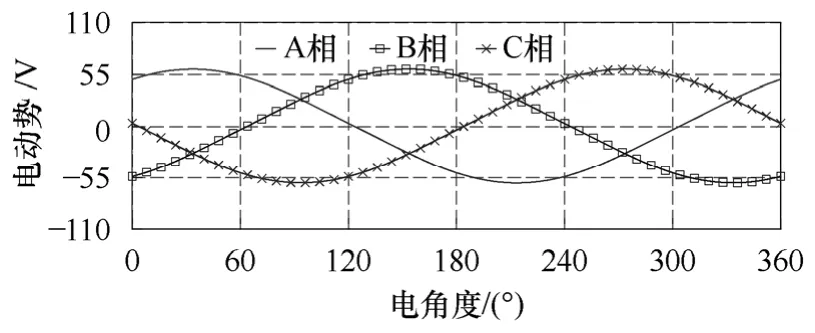
图5 空载感应电动势波形Fig.5 No-load EMF waveforms
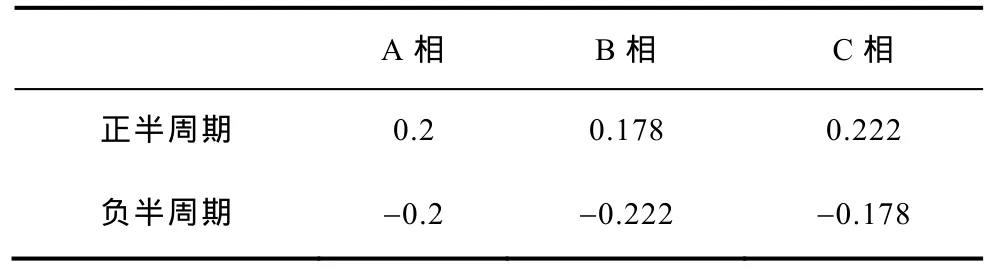
表1 三相空载磁链峰值Tab.1 Peak value of the 3-phase no-load flux linkage(单位:Wb)
5.2 电感
在使用有限元对电机的电感进行计算时,对电枢绕组的某一相通入电流,此时可以得到某相绕组中所匝链的总磁链为

式中 L—相绕组自感(被测相与通电相为同一相)或互感(被测相与通电相为不同相);
I—所通入的电流。
根据上式便可以得到绕组的电感

由于永磁体的存在,按照式(23)计算得到的电感称之为饱和电感,如果计算时将永磁体处理为空气则可以得到不饱和电感[18]。因为新型 LPPMV电机中的有效工作磁通为总磁通中的某次谐波分量,其幅值较小,所以永磁体对铁心的饱和程度影响很小,因此本文仅给出了不饱和电感的计算结果,如图6所示。
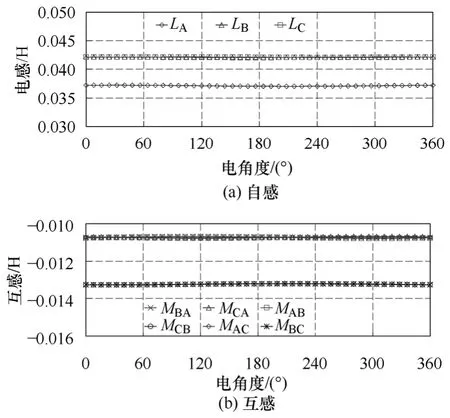
图6 绕组电感波形Fig.6 Winding inductance waveforms
由图6可知,新型LPPMV电机的电感几乎不随转子位置的发生变化,可以认为在整个电周期中为一恒定值,这一结论在后期电机的控制中非常重要。其次,如上文所述,该电机的三相绕组安排方式的差异性导致A相电感与B、C两相不同,它是由A1和A2的自感以及A1、A2之间的互感组成,但A1和A2两者之间并不能完全耦合,导致A相自感相对较小,A、B、C三相互感也因此存在差异。此外,与其他VRPM一样,LPPMV电机的电感较大,导致该电机作为发电机运行时,需要如3.2节所述由外界提供无功输入以补偿电感所需,以减小发电机的电压调整率,而当该电机运行于电动状态时,则需要较大的直流母线电压以提供电感上的电压降[7]。
5.3 定位力
定位力是衡量永磁电机性能的重要指标之一,它会对电机的起动性能、电磁推力纹波等产生影响,其周期以机械角度可以表示为

式中 Ncog—永磁同步电机初级齿数与永磁极数的最小公倍数,对于 6/2极电机Ccog=60°。
图7所示为采用虚功法计算得到的电机定位力波形,其峰峰值为±15N,周期为60°,与式(22)结果相符,表明PMSM的分析方法适用于LPPMV电机。
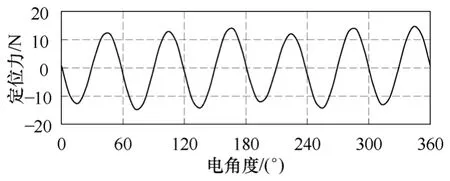
图7 定位力波形Fig.7 Cogging force waveform
5.4 电磁推力
如上文所述,直驱式系统中直线电机的运动速度一般较低,这就要求电机具有较大的电磁推力密度以减小制造和安装成本。图8所示为加载与感应电动势同相位的电流时,电机电磁推力随电流有效值的变化曲线。当电流小于额定值时,电磁推力几乎随电流呈线性变化,当电流超过13A时,由于磁路饱和,电磁推力增长趋缓。当电流等于额定电流13A时,电磁推力可达 1.6kN,由此计算得到该LPPMV电机的电磁推力密度为44.4kN/m2,远远大于普通永磁同步电机的经验值。
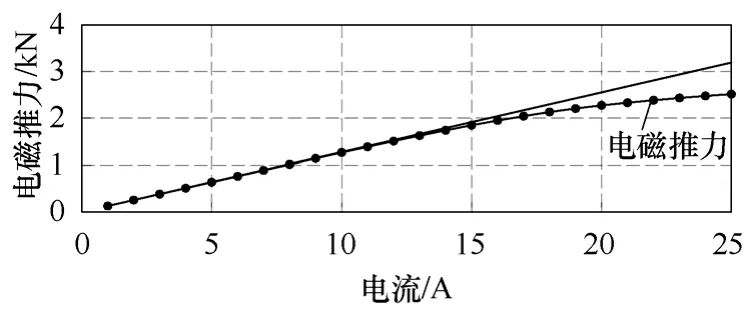
图8 电磁推力波形Fig.8 Electromagnetic thrust force waveform
6 样机实验
为了验证上述分析的正确性,设计并制造了一台额定功率为1.6kW的样机,主要尺寸参数见表 2。其中,槽电流密度的数据按有效铜线部分计算。
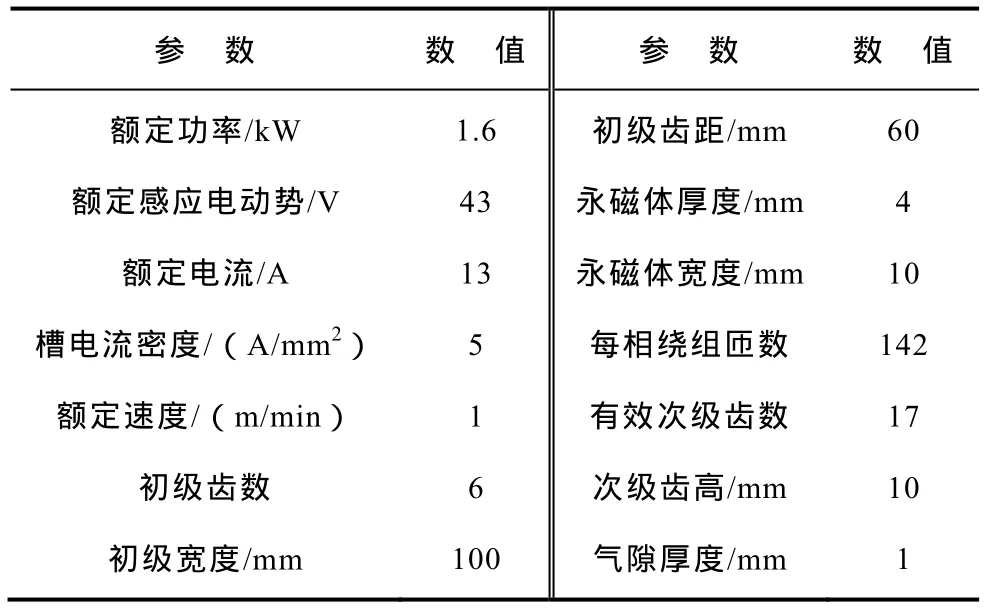
表2 电机参数Tab.2 Machine parameters
图9为样机初级及样机整机的实物照片。在测试初期,为了便于实验,将较长的电机次级设计成电机定子,而较短的初级设计成电机动子。图 10所示为电机在运行速度为额定速度 1m/s时的空载感应电动势实测波形,可见三相电动势基本对称,THD约为4.04%,其反电动势峰值约为55V,比图5所示的仿真值略小,主要原因是二维有限元忽略了电机的端部漏磁等因素的影响。
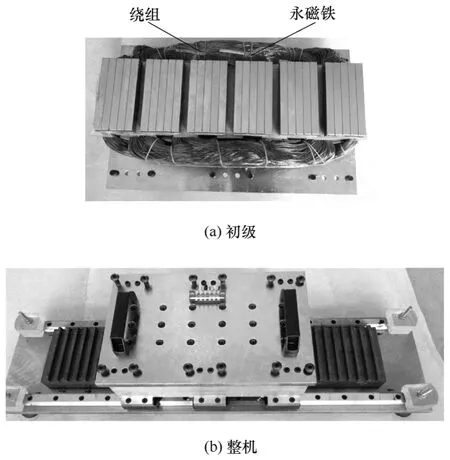
图9 LPPMV样机Fig.9 LPPMV prototype
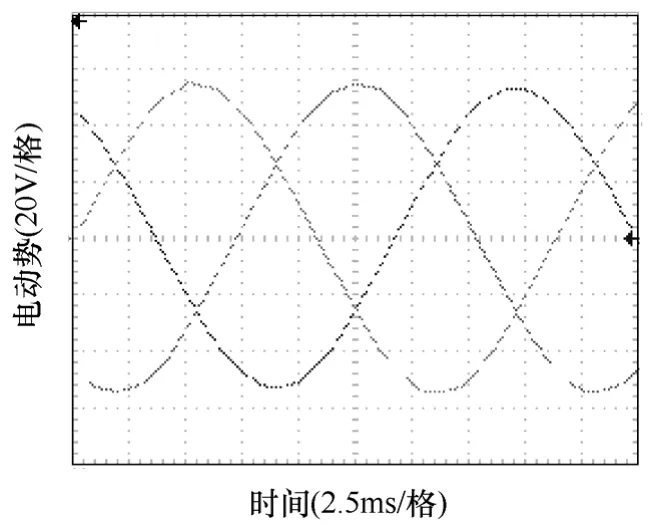
图10 1m/s时间空载感应电动势实验波形Fig.10 Measured no-load EMF waveforms at 1m/s
图11为采用LCR测试仪实测样机不同位置时三相绕组电感的变化规律,由图可见,三相电感几乎不随电机动子位置发生变化,且A相电感明显小于 B、C两相,与上文仿真结果和理论分析相符。此外由于电枢绕组的端部漏感和样机制作时三相绕组相对初级铁心的位置不同等因素,使实测电感大于二维仿真值,并使B、C两相电感与A相电感的差距增大,但仍与仿真值较为接近。
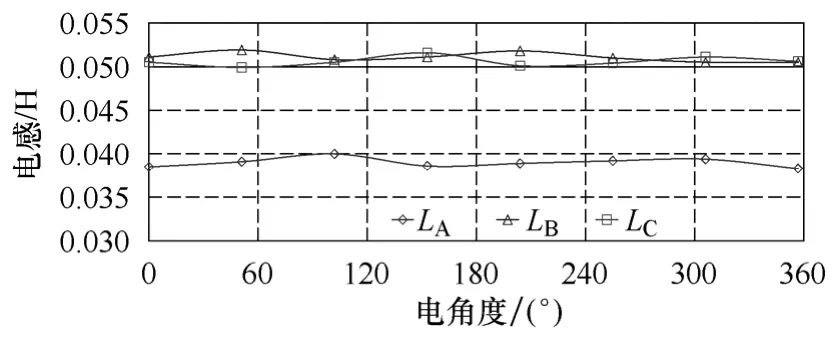
图11 电感实测波形Fig.11 Measured winding inductance waveforms
7 结论
本文提出并设计了一种新型 LPPMV直驱式直线电机,从气隙磁通密度着手,展开了该电机的二维磁场计算,详细分析了工作原理,并由此推导了其功率尺寸方程。通过二维有限元仿真,研究了LPPMV电机的空载磁链、感应电动势、电感、定位力和电磁推力等静态特性,并制造了实验样机,样机三相空载电动势和电感测量结果与设计结果吻合。研究表明,基于磁齿轮效应,该电机气隙中产生波长长、运行速度快的谐波磁场,使其具有较大的空载感应电动势和电磁推力密度,适宜用于低速工况的直驱式系统,如海浪发电等,但为了得到较大的磁齿轮变比,电机极对数设计得相对较小,导致了 LPPMV电机电感大,且三相电感之间存在差异等问题,作为发电机运行时,需要采取相应的控制策略降低其由电枢反应电抗引起的电压下降,发挥该电机大推力密度的特点。
[1]Falnes J.A review of wave-energy extraction[J].Marine Structures, 2007, 20(4): 185-201.
[2]游亚戈, 李伟, 刘伟民, 等.海洋能发电技术的发展现状与前景[J].电力系统自动化, 2010, 34(14):1-12.You Yage, Li Wei, Liu Weimin, et al.Development status and perspective of marine energy conversion systems [J].Automation of Electric Power Systems,2010, 34(14): 1-12.
[3]Wu Feng, Zhang Xiaoping, Ju Ping, et al.Optimal control for AWS-based wave energy conversion system[J].IEEE Transactions on Power Systems,2009, 24(4): 1747-1755.
[4]袁榜, 余海涛, 胡敏强.用于海浪发电永磁圆筒型直线发电机的结构优化与分析[J].微电机, 2011,44(3): 33-36.Yuan Bang, Yu Haitao, Hu Minqiang.Optimized design and analysis of permanent magnet tubular linear generator[J].Micromotors, 2011, 44(3): 33-36.
[5]Hodgins N, Keysan O, McDonald A S,et al.sign and testing of a linear generator for wave-energy applications[J].IEEE Transactions on Industrial Electronics, 2012, 59(5): 2094-2103.
[6]Du Jinhua, Liang Deliang, Xu Longya, et al.Modeling of a linear switched reluctance machine and drive for wave energy conversion using matrix and tensor approach[J].IEEE Transactions on Magnetics,2010, 46 (6): 1334-1337.
[7]Brooking P R M, Mueller M A.Power conditioning of the output from a linear vernier hybrid permanent magnet generator for use in direct drive wave energy converters[J].IEE Proceedings of Generation,Transmission and Distribution, 2005, 152(5):673-681.
[8]褚文强, 辜承林.新型横向磁通永磁电机磁场研究[J].中国电机工程学报, 2007, 27(24): 58-62.Chu Wenqiang, Gu Chenglin.Study on magnet field of novel transverse-flux permanent magnet machine[J].Proceedings of the CSEE, 2007, 27(24): 58-62.
[9]Atallah K,Howe D.A novel high-performance magnetic gear[J].IEEE Transactions on Magnetics,2001, 37(4): 2844-2846.
[10]张东, 邹国棠, 江建中, 等.新型外转子磁齿轮复合电机的设计与研究[J].中国电机工程学报,2008,28(30): 67-72.Zhang Dong, Chau K T, Jiang Jianzhong, et al.Design and research of a novel magnetic-geared outer-rotor compact machine[J].Proceedings of the CSEE, 2008, 28(30): 67-72.
[11]Chau K T, Zhang D, Jiang J Z, et al.Design of a magnetic-geared outer-rotor permanent-magnet brushless motor for electric vehicles[J].IEEE Transactions on Magnetics, 2007, 43(6): 2504-2506.
[12]Jian L, Chau K T, Jiang J Z.A magnetic-geared outer-rotor permanent-magnet brushless machine for wind power generation[J].IEEE Transactions on Industry Applications, 2009, 45(3): 954-962.
[13]Toba A, Lipo T A.Novel dual-excitation permanent magnet vernier machine[C].IAS Annual Meeting,1999:2539-2544.
[14]Mueller M A, Baker N J.Modelling the performance of the vernier hybrid machine[J].IEE Proceedings of Electric Power Applications, 2003, 150(6): 647-654.
[15]王玉彬,程明,樊英,等.功率分配用双定子永磁无刷电机设计与电磁特性分析[J].电工技术学报,2010, 25(10): 37-43.Wang Yubin, Cheng Ming, Fan Ying,et al.Design and electromagnetic performance analysis of double stator permanent magnet brushless machine for power splitting[J].Transactions of China Electrotechnical Society, 2010, 25(10): 37-43.
[16]王蕾, 李光友, 张强.磁通反向电机的变网络等效磁路模型[J].电工技术学报, 2008, 23(8): 18-23.Wang Lei, Li Guangyou, Zhang Qiang.Networkvarying equivalent magnetic circuit modeling of a flux-reversal machine[J].Transactions of China Electrotechnical Society, 2008, 23(8): 18-23.
[17]唐任远.现代永磁电机理论与设计[M].北京: 机械工业出版社, 1997.
[18]花为, 程明.新型三相磁通切换型双凸极永磁电机电感特性分析(英文)[J].电工技术学报, 2007,22(11): 21-28.Hua Wei, Cheng Ming.Inductance characteristics of 3-phase flux-switching permanent magnet machine with doubly-salient structure[J].Transactions of China Electrotechnical Society, 2007, 22(11): 21-28.