基于PLC和GPRS技术的交通信号灯远程监控系统
2012-08-15田海李雅妮肖鹏
田海,李雅妮,肖鹏
(内蒙古科技大学 信息工程学院,内蒙古 包头 014010)
1 引言
交通信号灯的控制是城市道路和交通管理体系的一个重要组成部分。它对城市发展和经济建设有着重要的关系。要想从根本上解决这个问题,除了要大力加大城市道路的建设,建立健全的交通管理体系等,更重要的是设计出一套对交通信号灯智能控制的系统,还要建立起监控中心站,对交通信号灯随时随地的远程监控和无线通讯,对突发的事件可以及时采取措施,合理地缓解交通拥堵的问题,平衡交通流量。
近些年来,我国大多数城市都采用传统的控制方法,它是通过对两个方向的红绿灯流量进行统计,再把两个方向的延时事先设定好的方法,但是一个路口的实际车流量是随机的、模糊的变量,不能用精确的数学模型来表达。这就需要把模糊控制的理论运用到PLC中,便于合理地解决红绿灯延时时间不足的问题,为了更好地及时解决交通滞留及突发事件的发生,我们采用了GPRS无线通讯技术在交通指挥中心站已组态好的画面中对交通信号灯进行远程无线监控,必要时可以采取紧急的强制措施来满足交通控制需求。
2 监控系统的总体方案设计
2.1 远程监控系统的原理
交通信号灯远程监控系统有监控终端站和监控中心主站组成,系统的结构图如图1所示。由于交通需求量的不确定性和随机性,我们把模糊控制的思想运用到监控终端站的PLC中去,监控终端站将交通灯及车辆传感器采集的信号通过自身配置的无线通讯模块 MD720-3发送到GPRS网络上,再通过GPRS网络将实时数据发送到公网Internet上,Internet公网通过防火墙的设备连接到交警指挥中心的内部局域网,这时监控中心站的计算机通过安装SINAUT MICRO SC和WINCC通讯管理软件就可以访问到实时数据[1]。
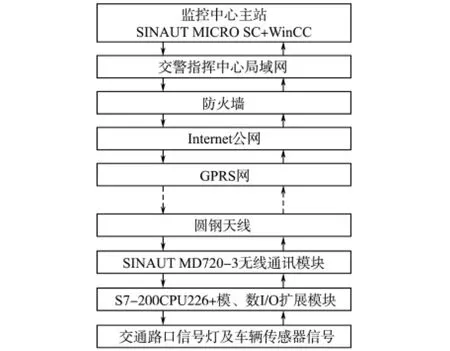
图1 交通路口信号灯无线智能监控系统结构图Fig.1 Structure block diagram of wireless and intelligentized monitoring system for traffic lights
2.2 监控终端站的设计
我国城市交通信号灯控制系统主要有两种:一种是继电接触式控制系统,另一种是单片机的信号控制系统。前者采用硬件接线逻辑和机械触点,因此灵活性和可靠性差;后者尽管功能很强大,灵活性也较强,但是不能大批量的生产,可靠性也很难保证。由于PLC的价格相对较高,所以在交通信号灯中的应用受到限制,近些年来PLC的性价比大大提高,功能强大,灵活性极强,可靠性和抗干扰能力也越发的显现。
由于西门子公司生产的PLC在抗电磁干扰能力,联网通讯及软件配套能力等方面尤为突出,所以监控终端站的硬件采用西门子小型的整体式PLC[2]。选择型号为 S7-200CPU-226,CPU-226有24个输入16个输出,共40个数字量I/O点及模拟量和数字量扩展模块。在监控终端站的PLC上配置了专用于S7-200系列PLC的GRPS无线数据通讯模块 MD 720-3,由 SINAUT MD720-3GPRS调制解调器、天线和GPRS通讯管理软件SINAUT MICRO SC(集成OPC Server)等组成,其调制解调器可以直接通过专用的数据电缆线与PLC的串口相连。用于发送数据的天线采用的是圆钢天线,它可以直接连到GRPS无线数据通讯模块 MD 720-3上,并且适合户外使用。
2.3 监控主站的设计
监控中心主站的设计是设立在交通指挥中心的监控室内,监控中心主站是一个计算机监控控制系统。需要在监控中心主站计算机上安装SINAUT MICRO SC软件和WinCC监控软件,前者是具有特殊通讯功能的OPC路由软件,可以完成SINAUT MICRO SC[3]与远程PLC的连接和通讯任务。后者是对数据进行连接和组态等设计,操作人员可以轻松的监控、数据存储、查询、打印报表等,并且紧急状况下可强制设定等功能。
3 无线通讯网络的设计
本系统采用GPRS无线网络通讯方式,具体模块采用西门子公司的无线通讯模块SINAUT MD720-3来实现WinCC与100多个S7-200PLC的远程通信。
3.1 GPRS技术简介
通用分组无线业务(GPRS)是在现有GSM系统基础上发展出来的一种新的网络业务。GPRS采用分组交换技术,每个用户可同时占用多个无线信道,同一个无线信道又可以由多个用户共享,实现资源有效的利用,从而实现高速率数据传输。GPRS支持基于标准数据通信协议的应用,可以实现与IP网、X.25网互联互通。GPRS具有全双工运作,间隙收发,永远在线,只有在收发数据时才占用系统资源,计费方式以数据传输量为准等特点,由于GPRS的核心层采用IP技术,底层可使用多种传输技术,这使得它较易实现端到端及广域的无线IP连接,以实现某种特定功能。
3.2 对比其他无线通讯方式
目前还有两种比较普遍的通讯方式。
1)无线以太网技术,它是当前最为广泛的计算机网络技术,通讯速率高,有广泛的技术支持,但是由于它的无线网络有效范围小于1km,网络规模小,硬件的成本比例高,不适合本系统采用。
2)数传电台技术,它具有实时性好,专用数据传输通道,组网灵活,适合于恶劣环境,稳定性好。不足是对于同一频点上,同时只能有一个设备发送数据,网络覆盖面积小,容量有限,而且对于城市建设的网络后期的运营成本很高[4]。
对比以上两种方案,GPRS通讯方式是利用公网实现的无线通讯方式,具有通讯速率快、有效范围较大、持久在线强、费用低、延时小等优点,更适合PLC控制系统与高层信息管理系统的通讯。所以综合以上方案,本系统选择了GPRS无线通讯网络的通讯方式。
4 监控系统的具体实现
4.1 二维模糊控制器的设计
二维Fuzzy控制器的构造是整个无线监控系统的核心工作,其中模糊语言变量的选择是否合理对最终系统性能的优劣起到至关重要的作用。为了便于描述,对于交通十字路口的交通方向规定为东西和南北4个方向。通过长期观测某中型十字路口的交通流量情况,发现在各时段的正常交通情况下,无论是东西方向还是南北方向通行时,都存在着一个基础的交通需求流量,在每次通行的基础流量之外再施加模糊控制,对于控制的准确性和实时性就更为合理。固定延时时间到时,测量到的绿灯方向的交通需求量X和红灯方向(此时为南北方向)的交通需求量Y作为二维Fuzzy控制器的两个输入模糊变量。
对于绿灯方向的交通需求量X是指亮绿灯的两个方向(此时为东西方向)在延时时间到时,尚未通过路口的车辆数(不计算已通过的车辆数)中的最大值。对于红灯方向的交通需求量Y是指亮红灯的两个方向(此时为南北方向)在延时时间到时,检测的未通过路口的车辆数中的最大值。控制器输出模糊变量Z为延时时间到时,绿灯方向(此时为东西方向)的绿灯追加延时时间。南北方向的通行时亦然。在实际控制中,在固定延时时间到时,4个方向的未通过车辆数是通过安装在每个路口方向的近端和远端的车辆检测器,测量到的每个路口停车线以外的车辆排队长度,按5m1台车辆计算出来的。
结合实际情况,绿灯方向交通需求量X的论域选择(0~15台),选取5个模糊子集﹛很少,少,中等,多,很多},隶属度函数的设计如图2所示。红灯方向交通需求量Y的论域选择(0~20台),选取5个模糊子集{很少,少,中等,多,很多},隶属度函数的设计如图3所示。输出模糊变量Z的论域选择(0~30s),选取5个模糊子集{很短,短,适中,长,很长},隶属度函数的设计如图4所示。

图2 变量X的隶属度函数曲线Fig.2 Membership function curves of variable X

图3 变量Y的隶属度函数曲线Fig.3 Membership function curves of variable Y
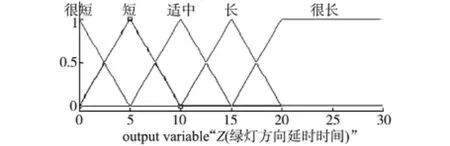
图4 变量Z的隶属度函数曲线Fig.4 Membership function curves of variable Z
监控系统智能水平的高低是通过模糊控制规则的好坏来体现的,模糊控制规则是模糊控制器的灵魂,它包含着丰富的、模糊的人的智能判断。通过大量的实地观测,再结合现场指挥交警的丰富经验,最终设计的模糊控制规则25条,模糊输出Z如表1所示。
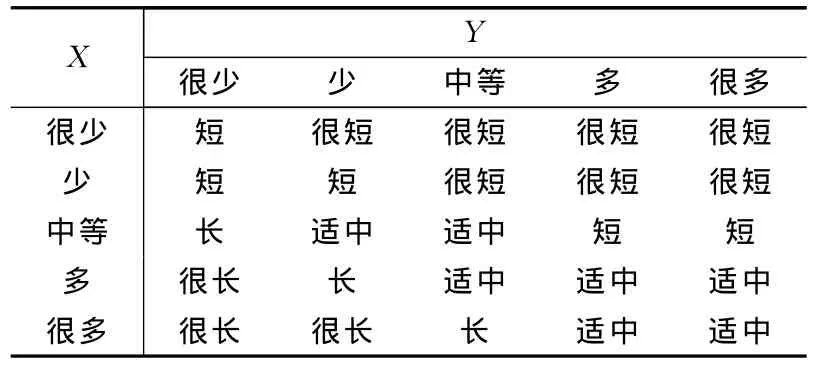
表1 模糊控制规则表Tab.1 Fuzzy control rules table
从模糊控制规则表中得到的结果仍然是模糊量,还要通过模糊推理和反模糊算法才能得到精确量的输出。本系统采用较为实用和经典的简易模糊推理算法。对于一个确定X和Y的输入,运用Min的模糊策略,求出每条激活规则的从属强度,然后采用重心法[5](加权平均数法)解模糊,得到绿灯方向的精确追加延时时间(精确到s)。
4.2 监控系统的PLC实现
为增强监控系统的可靠性并降低开发成本,具体设计时,在不增加额外的硬件和软件开销的情况下,模糊控制器直接通过监控终端站的S7-200PLC来实现;同时,为增加系统控制的实时性,尽量减小PLC用于模糊控制算法的计算和编程量,利用Matlab软件提供的模糊逻辑控制工具箱进行模糊控制器的软件辅助设计,直接获得模糊控制器在各种可能输入条件下的输出结果(模糊控制查询表),事先将模糊控制查询表存储在S7-200CPU226的变量存储器V内[6]。在实际控制中,在每次固定延时时间到时,PLC根据实时的绿灯方向的交通需求量X和红灯方向的交通需求量Y的值,通过读取简单的查表子程序就可以在模糊控制查询中直接获取追加延时时间的输出值。
由于交通路口的特殊性,为了尽量缩短现场调试的时间,可以通过S7-200CPU226自身的硬件配置对模糊控制器进行仿真实验。借助S7-200CPU226本机携带的两个旋转电位器SMB28、SMB29(数据占用一个字节,变化范围0~255)直接模拟绿灯方向的交通需求量X和红灯方向的交通需求量Y,通过简单的转换程序,先将两个电位器的模拟量输入值分别转换为相应基本论域范围的对应值,再通过取正指令ROUND将其变为X和Y内所对应的具体车辆台数,最后通过查表程序找到对应的追加延时时间;用PLC内的定时器T37来设定固定延时时间,并用定时器T37定时到时的状态位控制两个模拟电位器的采样开始时刻;用S7-200CPU226开关量输出点上自带LED指示灯模拟相应的交通信号灯,观察4个方向红灯和绿灯模糊输出的变化情况。4个方向的黄灯、左、右转弯灯及人行灯与相应的绿灯追加延时时间都有固定的时序关系,编制相应的逻辑控制程序即可实现。
4.3 远程无线通讯的实现
4.3.1 控制中心站的设计
首先要在监控中心主站的计算机上安装SINAUT MICRO SC通信路由软件和WinCC监控组态软件。主站计算机必须拥有一个动态域名或公网的固定IP地址,联网的方式一般有3种:通过Modem直接拨号连接Internet、通过ADSL Modem拨号连接Internet及通过路由器连接Internet。前两种方法相当于将计算机直接连接到Internet网上,容易受到网络攻击,而通过路由器连接Internet一般都具有防火墙的保护功能,可以增强数据网络传输的安全性。通过路由器联网,相当于把监控中心主站计算机设在内网的一台计算机上,该计算机拥有的是内网IP地址,而在路由器上获得的是公网IP地址。在路由器上进行端口映射,在接收数据时,把指定端口的数据转发到内网指定IP地址的计算机上;而具有内网IP地址的主站计算机往外发送数据信息时,通过路由器把其内网IP地址替换成公网的IP地址后,再将数据打包发向Internet公网[7]。
4.3.2 控制终端站的设计
监控终端站的S7-200CPU226PLC及扩展模块、无线通讯模块SINAUT MD 720-3及专用圆钢天线配置连接好后,还必须在SINAUT MD 720-3模块内插入在移动公司办理已开通GPRS服务的SIM卡,并且要知道该SIM卡的PIN码。PC/PPI通讯电缆(适配器)的拨码开关位置设置为:1,2,3,6,7开关拨到 ON 位,4,5,8开关拨到OFF位。
硬件设置完成后,在SINAUT MICRO SC软件的光盘上找到库文件,添加GPRS通信的库程序,对监控终端站进行初始化软件设置。该库文件包含4个子程序模块,其中,WDC-INIT模块需要设置的参数主要包含中心主站获得的公网IP地址、在中心主站中定义的终端站的端口号、Modem名、Modem密码、SIM卡的PIN码及移动网络的无线接入点等;WDC-SEND模块需要设置的参数主要包含发送触发条件、发送目的站地址、发送缓冲区起始地址、长度等;WDC-RECEIVE模块需要设置的参数主要包含接收缓冲区起始地址、长度等。WDC-CONTROL模块需要设置的参数主要包含自由口与GPRS模式切换条件、延时时间等。初始设置完成后,根据要传送数据编写用户的通讯程序,该程序基本就是顺序的调用以上4个功能模块。对于这4个通讯模块,只有WDC-SEND模块可以控制发送条件,其余3个就是赋值相应参数且在每个PLC扫描周期调用即可。
4.3.3 实时数据的传输
实时数据的双向无线传输是一个较为复杂的过程,现以从监控终端站向监控中心主站传送一个8s的追加延时时间为例说明其主要过程:首先S7-200将模糊控制器输出的8s时间传送到其内部的变量寄存器V(在 WDC-SEND中已定义的发送缓冲区)中;在用户通讯程序中调用WDCSEND模块将该数据发到Modem上;Modem将数据8s转化为GPRS的数据包格式,通过GPRS服务转发到移动服务供应商;移动网络服务供应商提供了与Internet的接入点,将数据8s转发到Internet公网上;Internet通过路由方式把数据8 s转发到Internet网络服务供应商的中心站,通过端口映射和防火墙将该数据转发到SINAUT MICRO SC;SINAUT MICRO SC将数据8s作为外部变量提供给WinCC软件进行组态连接的同时,会发一个确认信息给远程监控终端站;远程的Modem接收到确认信息后,将其转发给S7-200CPU226,PLC的CPU 通过 WDC-RECEIVE模块接收确认信息,紧接着又通过 WDC-SEND模块发送一个发送完成的确认信息给用户程序[8]。
5 结论
本文针对城市交通路口交通流量的随机性和不确定性的特点,将模糊控制策略引入到交通路口的控制系统中,有效地解决了传统控制系统中固定定时方法的不足,合理动态地分配了交通流量的通行时间,提高了交通资源的利用率。在充分调研现有交通路口控制系统的基础上,在监控终端站的硬件构成上,采用了可靠性高、抗干扰效果好、通讯联网能力强的西门子S7-2 0 0 PLC。
在模糊控制器的构造方法上,直接利用现有的PLC硬件资源,提高了系统的可靠性和性价比;在模糊控制器的软件设计时,利用Matlab软件进行辅助设计,加强了控制的实时性。借助S7-200的硬件配置进行模糊控制的仿真实验,可以方便模糊控制器性能的修正,大大地缩短了现场调试的时间。通过对比几种PLC无线通讯方式特点的基础上,在采取了有效的数据安全性措施后,选择了GPRS通讯方式,结合本系统设计,其显著的优点是可以在公网覆盖的范围内随时进行持久在线通讯,充分利用已有的网络资源,设备传输功率要求小、性价比高,通讯系统的扩容性和传输容量较大。
城市十字交通路口信号灯智能无线监控系统是整个城市智能交通系统乃至城市数字化、网络化、智能化管理系统的一个组成部分。本系统首先选择一个交通十字路口进行实验性投入,自投入运行1a来,监控系统运行稳定、效果良好,达到了设计要求。SINAUT MICRO SC是S7-200PLC用于远程无线通讯的一个用途极为广泛的软件包,OPC服务器可以通过GPRS最多连接256个远程的S7-200监控站到中心监控主站。若一个区域内多个路口(监控终端站)之间可以动态的交互数据,由监控终端主站进行统一的协调,必将进一步提高城市交通的综合控制技术和管理水平。
[1]潘世永,郑萍.工业控制网络的体系结构[J].电气自动化,2003,25(4):3-6.
[2]阳宪惠.工业数据通讯与控制网络[M].北京:清华大学出版社,2003.
[3]梁涛,马爱龙,孙鹤旭,等.具有GRRS远程通讯的换热站自动控制系统研究设计[J].电气传动,2008,38(7):69-72.
[4]田海,崔桂梅,王晓红,等.西门子PLC控制网络的配置策略与应用[J].电气传动,2010,40(1):76-80.
[5]王海燕,杨平,王志萍.基于GRRS技术的电能质量在线监测系统[J].低压电器,2010,364(19):30-33.
[6]万力.基于无线通讯技术的路灯监控系统设计[J].低压电器,2010,352(11):22-25.
[7]刘华波.西门子S7-200PLC编程及应用案例精选[M].北京:机械工业出版社,2009.
[8]崔坚.西门子工业网络通讯指南[M].北京:机械工业出版社,2006.