模糊控制技术在智能吸尘器自动充电中的应用
2012-08-15刘训非张首峰
刘训非,张首峰
(1.苏州工业职业技术学院 电子工程系,江苏 苏州 215104;2.河南省城乡建筑设计院有限公司,河南 郑州 450003)
1 引言
社会的进步和发展使人们的生活节奏越来越快,如何最大程度地摆脱日常繁杂的生活琐事,成为人们不断追求的目标。服务机器人正是为迎合这一目标而出现。智能吸尘器是服务机器人的典型代表,它能够在无人干预的情况下,自动根据程序设定完成房间清扫工作,并且在自动清扫过程中能够完成楼梯检测、防碰撞、自动倾倒收集到的垃圾等功能。但是现有智能吸尘器的充电电池,需要借助人将电源接通到插座上才能完成充电功能,降低了智能吸尘器的智能性,给人们生活带来不便,所以需要一种能够完成自动充电的智能吸尘器。
论文提出了一种基于模糊控制技术的自动充电算法,该算法能够自动检测电源电量,利用红外传感器检测出充电器的位置,根据模糊控制算法自动规划出一条从智能吸尘器当前所在位置到充电器的路径,并能够在移动过程中自动避障,从而完成智能吸尘器的自动充电行为。
2 总体设计
自动充电算法从本质上说是一种点到点的路径规划算法,即寻找一条从智能吸尘器当前所在位置到充电插座的一条无碰路径。基于模糊控制技术的自动充电算法是将模糊控制技术应用到点到点路径规划上,其实现过程如下:
1)首先智能吸尘器的电源检测模块自动检测电池电量,当电量低于设定的阈值时,智能吸尘器停止清扫工作,进入充电器检测状态;
2)智能吸尘器根据本体安装的红外传感器检测电源插座发出的红外信号,进入外部环境检测状态;
3)智能吸尘器根据本体安装的传感器检测智能吸尘器当前位置周围的传感器分布情况,对当前环境进行分类,智能吸尘器进入模糊推理阶段;
4)模糊控制算法将插座发出的红外信号以及获得的外部环境信息模糊化并产生规则库,根据规则库推理出一条从智能吸尘器本体位置到目标插座的一条无碰路径。
基于模糊控制算法的智能吸尘器模糊避障控制系统如图1所示。
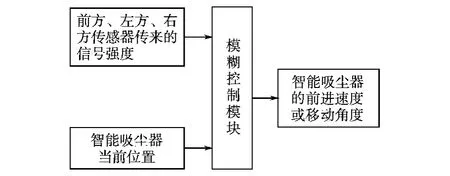
图1 智能吸尘器模糊避障控制系统Fig.1 Intelligent cleaner fuzzy control system
2.1 模糊控制模块的组成
模糊控制是建立在模糊推理基础上的基于规则的非线性控制,它直接使用模糊语言模拟人的直觉或经验进行控制。基于模糊控制算法具有较好的鲁棒性,对环境参数变化的适应性较强,而且具有很好的抗干扰能力[1]。
模糊控制模块的组成如图2所示。

图2 模糊控制模块Fig.2 Fuzzy control module
如图2所示,一个典型的模糊控制模块由4个重要模块组成:知识库、模糊推理机制、模糊化输入接口与模糊化输出接口。
知识库包含模糊if-then规则库和数据库。规则库中的模糊规则定义体现了与领域问题有关的专家经验或知识。模糊推理机制建立在表示为模糊规则的知识库上,按照这些规则和所给的事实执行推理过程,求得合理的输出或结论。简单的说就是根据已知的命题,按照一定的法则,推断出一个新的命题。也可理解为从已知的条件求未知结果的思维过程。模糊规则的多少取决于输入和输出物理量的个数以及所需的控制精度[2]。
模糊输入接口将明确的输入转换为对应隶属函数(模糊语言值是用隶属度函数描述的,隶属度函数反映的是事物的渐变性)的模糊语言值。
模糊输出接口则将模糊的计算结果转换为明确的输出。
2.2 算法实现
课题选用的模糊控制是一种多输入、多输出的控制方式,输入变量为各组传感器测得的信号强度值:近(N)、中(M)、远(L)及智能吸尘器当前的倾角Δθ;输出变量为智能吸尘器转动的角度和移动速度。
2.2.1 输入量设计
1)前方、左方、右方传感器测得信号强度值。传感器测得的信号强度值为:[0,10],将其划分为11个等级,{0,1,2,3,4,5,6,7,8,9,10},距离信息的模糊子集定义如下:{近(N)、中(M)、远(L)}。
隶属度函数图形如图3所示。
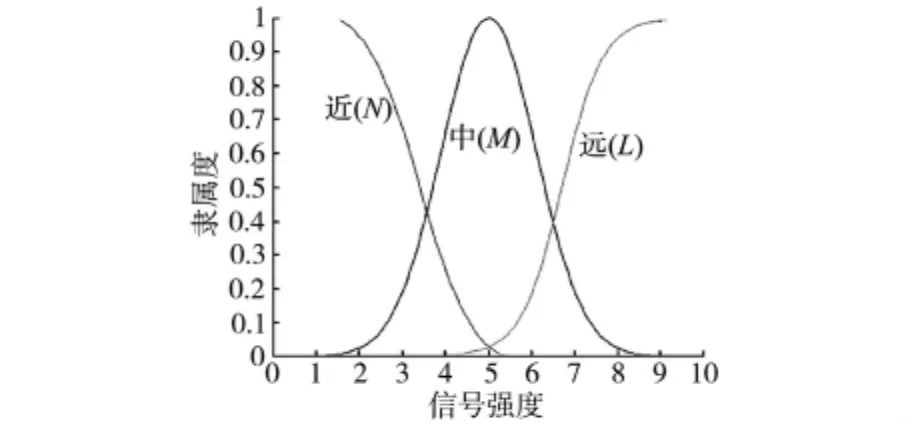
图3 前方、左方、右方传感器获得的信号强度隶属度函数Fig.3 Membership function of front,left,right signal strength
2)智能吸尘器当前位置β。β的隶属模糊子集定义为{DL、DR}。当β≥0,即智能吸尘器在目标插座的左侧时,取值为DL;反之取值为DR。
2.2.2 输出量设置
输出变量为智能吸尘器移动转动的角度和速度。
1)移动角度。智能吸尘器的转向角范围为[-π/3,π/3],将其论域划分为7个等级:{-60°,-40°,-20°,0°,20°,40°,60°},其模糊子集定义如下:{左转(TL)、稍微左转(TFL)、前进(TF)、稍微右转(TFRL)、右转(TR)}。
移动角度隶属函数图形见图4。
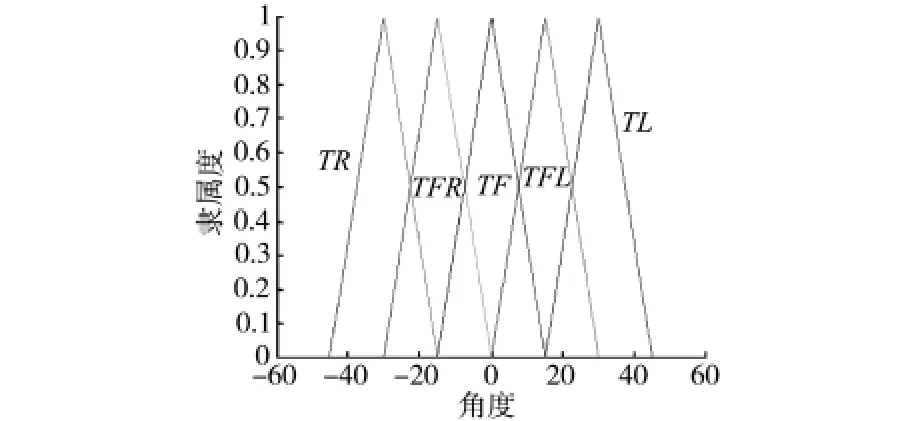
图4 移动角度隶属函数Fig.4 Membership function of moving angle
2)移动速度。模糊子集定义如下:{中速前进(M)、慢速前进(N)、后退(BA)}。隶属度函数同图3。
2.3 模糊规则的建立
模糊规则是模糊控制的关键部分,模糊算法实际上是根据模糊规则进行设计的。而模糊规则是人们根据控制过程中的实际经验总结出来的用模糊语言表示的条件语句[3]。
论文设计中用D左表示左边红外传感器测得的红外信号强度值,D前表示前边红外传感器测得的信号强度值,D右表示右边红外传感器测得的信号强度值,angle表示输入位置,Oangle表示输出的转向角,Ov表示输出的速度。模糊规则形式为
If D左=…and D前=…and D右=…and angle= …=THEN(Oangle=…and Ov=… )
例如:
If D左=Nand D前=Land D右=Land angle=DL =THEN(Oangle=TF…and Ov=m )
If D左=Nand D前=Nand D右=Land angle=DL =THEN(Oangle=TR…and Ov=m )
由于本设计输入是3组传感器测得的信号强度值及智能吸尘器当前的方向角,每组距离的模糊语言值有3种情况,智能吸尘器当前方向角有2种情况,输出为转向角和加速度,转向角的模糊语言变量有5种情况,速度有3种情况,所以可以建立81种模糊控制规则。将这些规则放在数据库中供智能吸尘器避障的时候查询和使用。本文中为了提高效率,减少重复计算并减少内存占有量,将这些模糊规则制成表格,这样模糊控制器的工作就可以简化为根据输入查表决定输出,从而大大提高模糊控制的效率。
2.4 清晰化
清晰化也是模糊控制中的关键部分,所谓清晰化又叫反模糊化。即把模糊量转换成精确量,从而控制被控对象。之所以需要清晰化是因为由模糊控制规则表得出的输出是模糊量,而实际控制被控对象需要的是精确量[4]。本文采用面积重心法进行清晰化。这种方法的做法是取模糊隶属度函数曲线与横坐标围成面积的重心作为模糊推理的最终输出值[5]。
2.5 仿真实现
本文用智能小车代替智能吸尘器,模拟实现智能吸尘器的自动充电算法。智能吸尘器的硬件组成如图5所示。
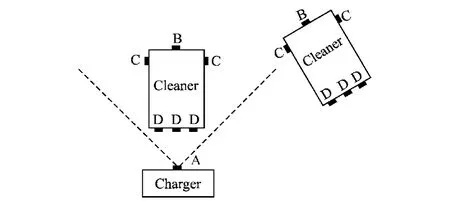
图5 智能吸尘器硬件组成示意图Fig.5 Intelligent cleaner hardware schematic
Charger为安装在墙上的充电器,内有红外发射模块A。
Cleaner为智能小车车体,B模块为远距离红外线接收模块,接收充电器处红外发射模块发出的红外信号,确保智能小车移动到充电器发射出的红外信号范围内,并挪动到智能小车正前方。C模块为近距离红外线接收模块,当智能小车在充电器正前方时,以最快速度移动到充电器附近。D模块为接收器,用来实现对接定位。
当智能小车检测到电量不足时,停止工作,启动充电器检测程序。充电器检测是根据上文介绍的模糊算法实现的,当智能小车右侧的红外传感器检测到强信号时,智能小车向右旋转直至右侧传感器检测到的信号强度为弱,左侧传感器检测到的信号强度为强时停止。与此同时,智能小车记录小车本次旋转的角度,并向相反方向旋转同样角度的1/2,待旋转稳定后,向前行走一定距离,重复上述操作,直至智能小车移动到充电器发出的红外信号区域内。当移动到红外区域内之后,根据近红外传感器测得的信号强度值,智能小车根据算法调整位置并移动到充电器的正前方,同时朝充电器方向移动。当智能小车越来越靠近充电器的时候,智能小车根据检测到的信号强度值,调整位置完成转弯掉头操作,为实现对接做准备。智能小车从寻找充电器,到向充电器逐步靠近直至完成对接,实现充电,整个过程都是智能小车根据充电器发出的信号强度,靠近的过程,它不仅能够保证探索路径是最短的,而且具有很强的稳定性。
3 结论
论文提出了一种使用模糊控制技术的智能吸尘器自动充电算法,并且在硬件平台上对模糊控制理论及算法进行了实现,通过仿真实现可以看出,该算法能够自动规划出到目标点的一条无碰路径。且具有较强的稳定性与实时性。
论文的创新点在于将模糊控制与传感器结合起来,避免了单纯使用传感器产生的盲区。但是本文中模糊规则使用的是二维表。该方法的缺点是变更模糊规则和隶属函数不方便,而且当输入量个数增加时,表格的存储容量将指数级增长。
[1]Fu Yili,Li Han,Jiang Zainan,et al.Double Layers Fuzzy Logic Based Mobile Robot Path Planning in Unknown Environment[J].Intelligent Automation and Soft Computing,2009,15(2),275-288.
[2]Yang SX,Luo C.A Neural Network Approach to Complete Coverage Path Planning[J].IEEE Transaction on System,Man and Cybernetics,2004,34(1):718-724.
[3]付宜利,顾晓宇,王树国.基于模糊控制的自主机器人路径规划策略研究[J].机器人,2004,26(6):548-552.
[4]李群明,熊蓉,褚健.室内移动机器人定位方法研究综述[J].机器人,2003,25(6):506-567,573.
[5]Maaref H,Barret C.Sensor-based Navigation of a Mobile Robot in an Indoor Environment[J].Robotics and Autonomous Systems,2002,38(1):1-18.