PMSM矢量控制在高端波轮洗衣机中应用的研究
2012-08-15王新胡路东徐娟马如民
王新,胡路东,徐娟,马如民
(河南理工大学 电气工程与自动化学院,河南 焦作 454003)
波轮洗衣机有两种运行工况:洗涤和脱水。在洗涤状态时,电机的转速较低,要求大转矩;在脱水状态时要求的转速较高。基于洗衣机两种不同工况时对转速和转矩的要求不同,在PMSM的控制上选择了两种不同的电流控制方式,在洗涤时采用id=0的控制方式,以满足电机对低速大转矩的要求,为了保证洗衣机在脱水时能达到脱水的转速要求,使用弱磁的控制方式。为了减小对芯片的要求,本文在弱磁的选择上,使用一种简单的超前角的弱磁方式,这样减小了对芯片的要求,降低了成本。
1 工况分析和控制策略
1.1 工况分析
洗衣机的整个洗衣工程包括称重、洗涤和脱水。首先洗衣机通过称重得出衣服的重量从而选择洗涤中加入的水量,选择洗衣的时间,接着进入洗涤状态,通过筒带动衣服往复的左转、右转,利用筒和衣服的摩擦将污渍从衣服上脱下,然后再进入高速脱水,将衣服甩干,然后进行洗涤和脱水的循环。对于波轮洗衣机来说,洗涤的速度一般要求为50~200r/min,脱水的速度一般要求为1000r/min。
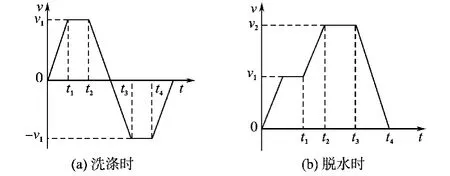
图1 运行工况图Fig.1 The operating conditions chart
1.2 控制策略
在驱动装置的选择上,基于永磁同步电机转矩密度高、效率和功率因数高,选择永磁同步电机作为驱动器,可以建立永磁同步电机在两相旋转d-q坐标系下的数学模型[1-5]。
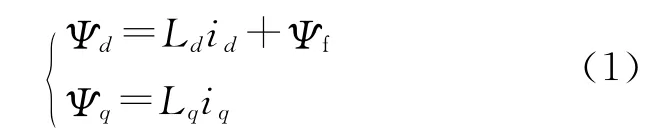
磁链方程:
电压方程:

转矩方程:

运动方程:

式中:Ld,Lq为d,q轴电感;Te,Tl为电磁转矩和负载转矩;Rs为定子电阻;ω为转速;pn为极对数;J为转动惯量。
令id=0即为id=0的控制方式,使用这种控制方式时,由于不用考虑d轴的电流分量,所以计算量较小,且没有电机的去磁效应,较为简单,功率因数也较高。
使用id=0的控制方式在电机达到额定转速时,电机将不能继续升速,这时逆变器的容量达到最大,磁通和转速的乘积不变,且磁通和转速成反比,在最大电压不变的情况下可以采用减弱磁通的方法来升高转速[1,6-7]。当转速较高时,且稳定运行时,di/dt=0且Rs≪ωid,ωiq,所以有:

由于电压和电流受最大电压和最大电流umax,imax的限制,有:

从而得出电压和电流极限圆,如图2所示。
由式(6)可得转速:

可以看出,当Id=Ψf/Ld时转速达到理想值。
本文中使用的弱磁方式是文献[1]中提出的一种简单的超前角弱磁,即在估算出的角度基础上再加上一个超前角,相当于将坐标系旋转一个角度,从而达到弱磁的效果,如图3所示。
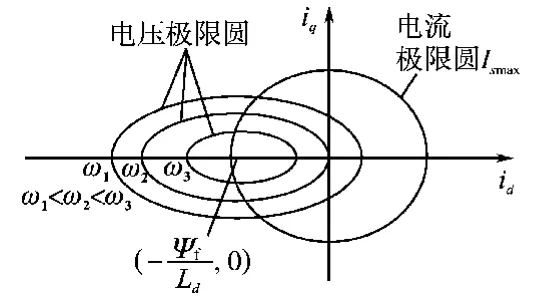
图2 电压和电流极限圆Fig.2 Voltage and current limit circles
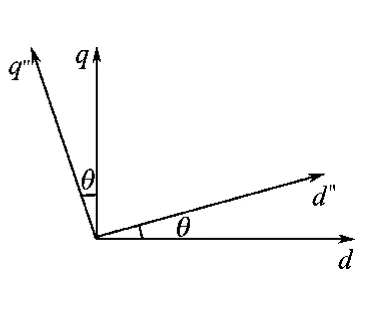
图3 超前角弱磁Fig.3 Advance angle weak magnetic
由于洗衣机洗涤和脱水对转矩和转速的要求不同,所以在永磁同步电机的控制方法上使用了两种不同的控制方式,在基速以下电机工作在恒转矩调速区,在基速以上工作在恒功率调速区,整体的设计如图4所示。
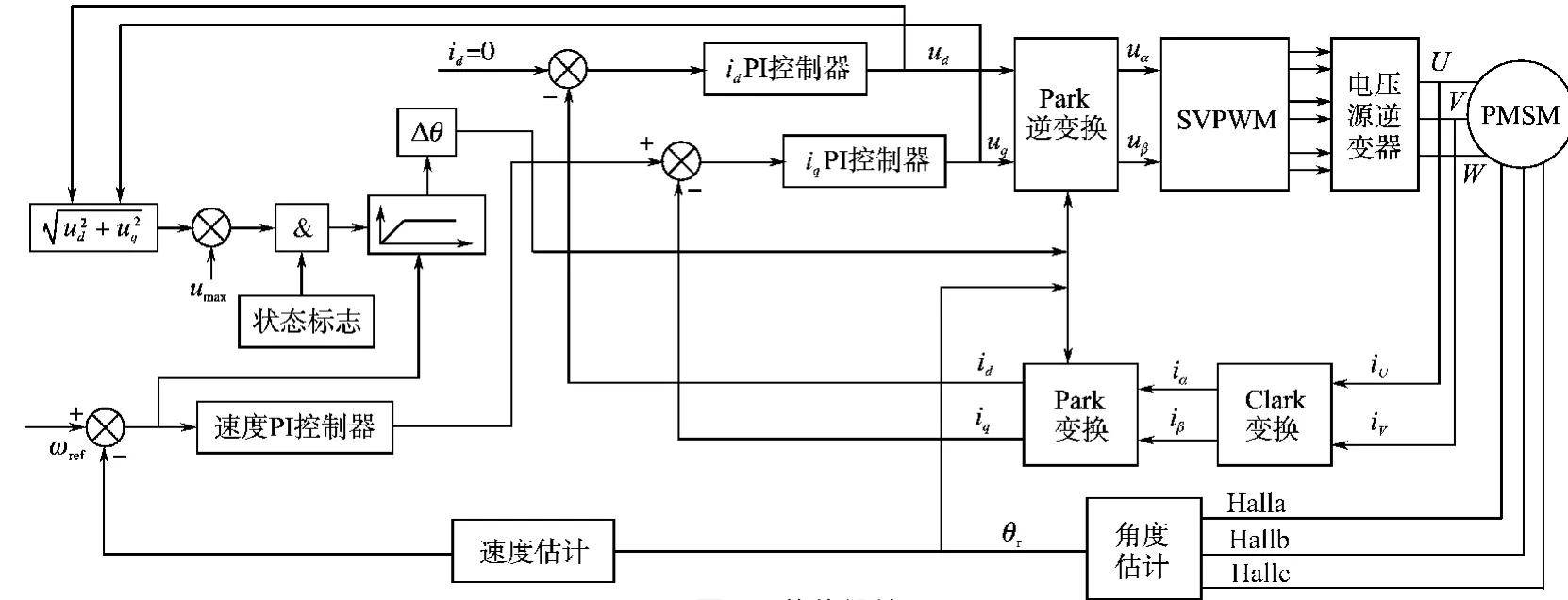
图4 整体设计Fig.4 The overall design
2 整体实现方法
通过以上分析,使用英飞凌的16位单片机xc164cs实现控制,整体的实现框图如图5所示。
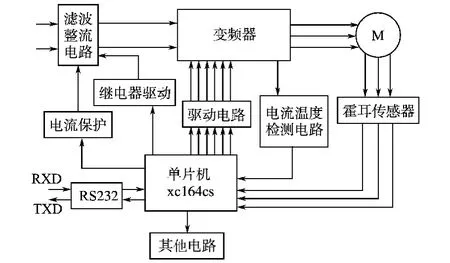
图5 整体设计框图Fig.5 Block diagram of the overall design
2.1 位置检测
在PMSM进行矢量控制时要检测转子位置,从而实现精确的控制,由于霍耳传感器的价格相对来说比较便宜且可以满足洗衣机中对转子位置精度的要求,所以本文中检测位置使用的是3个霍耳传感器;其中3个霍耳传感器相差120°(电角度),3个霍耳将整个空间分成了6个扇区,每个扇区为60°(机械角度)。3个霍耳有高低电平,共组成了000~1118种组合,在这里使用其中除去000和111之外的其他6个组合。表1给出了转子扇区对应的角度和扇区切换时的电机正反转方向,其中1~6对应了扇区号,CW,CCW代表洗衣机内筒的正转和反转。
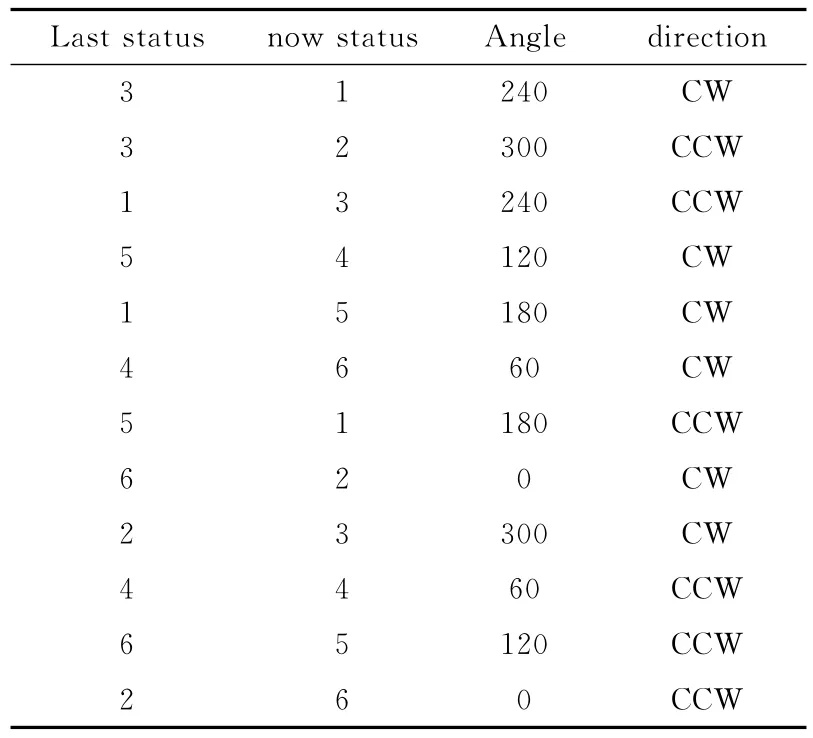
表1 转子角度表Tab.1 The rotor angle of the table
通过霍耳传感器可以测出电机的旋转速度ω,转子的角度可以通过以下公式求出:

在扇区切换时角度进行一次修正,从而减小了测量的误差。
2.2 称重
对于高性能的全自动波轮洗衣机来说,加水是自动进行的,洗衣机加入的水量是由加入的衣服的重量决定的,洗涤的时间也是由洗涤的衣服的重量决定的,所以在洗涤之前的称重是很重要的,本文提出了一种全新的方法进行称重。首先选定洗衣机称重的转速范围,本文中使用的速度范围为n1~n2,采用的具体方法是,检测出电机在转速从0到n1和由n1加速到n2时的逆变器的母线电压和电流,因为在不同的衣服重量条件下,电机在同一转速时逆变器的电压和电流值是不同的,利用这样方法可以得出返回的不同值,利用在加速时的电压和电流乘积加上低速的电压和电流的乘积,通过返回值可以得出当前衣服的重量。具体在采样时,如图6所示,在转速从零到n1时,每隔固定的时间t采集一个点的电压和电流,求出对应电压和电流的乘积,求出所有点的功率总和P0,在速度为n1时运行一段时间,并采集n个点,算出平均值P1,然后在n1到n2加速的过程中每隔一个固定的时间t采一个点,设由t2到t3采集了m个点,这m个点对应的能量为P2,这时的返回值为

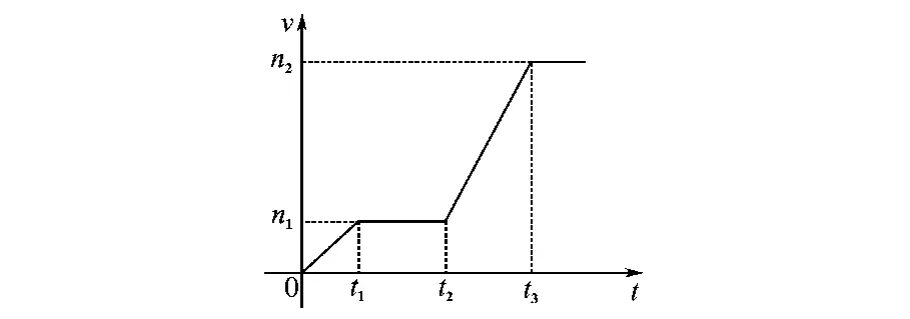
图6 称重原理图Fig.6 Schematic of weighing
通过这种方法可以得出此时的衣服重量返回值,然后决定洗涤时的加水量和洗涤时间。在实际的称重运行中,每一台洗衣机的自然条件不同,可能受到的干扰不同,所以每一台洗衣机称出的重量值可能有所差异,另外当重量不同时得出的数据可能会有交叉,所以需要加入一个滤波,此滤波通过软件来实现。在数字滤波中,常用的滤波方法有限幅滤波法、中值滤波法、算术平均值滤波法、限幅平均滤波法等,本文使用的是限幅平均滤波法。
3 实验结果
本文中使用的永磁同步电机的参数为:极对数p=12,定子电阻Rs=2.875Ω,直轴电感L=84mH,交轴电感=84mH。
图7给出了通过上述方法称重得出的结果,其中曲线0~7分别代表了在洗衣机内物体为0~7 kg对应的经过放大修正的功率返回值。从结果可以看出,使用这种方法得出的结果基本可以区分出1kg对应的值,所以这种方法是可行的。

图7 称重对应的图表Fig.7 Corresponds chart of the weigh
使用矢量控制的方法配合软件和硬件,最终得出了实验结果,如图8~图10所示。其中图8为洗衣机由正常运行到刹车时的电流波形;图9为洗衣机洗涤状态下正反转的电流波形;图10为电机在高速脱水时的电流波形。
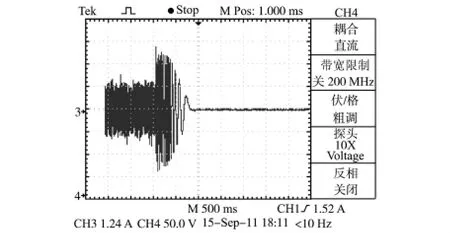
图8 洗衣机刹车时的波形Fig.8 The waveform of washing machine braking

图9 洗衣机洗涤时的波形Fig.9 The waveform of washing machine washing
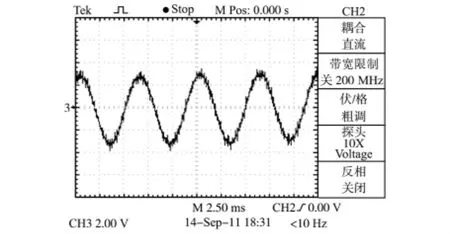
图10 洗衣机高速脱水时的波形Fig.10 The waveform of washing machine high-speed dehydration
4 结论
通过两种不同的电流控制方法可以实现永磁同步电机的各个速度阶段的控制,在选用英飞凌公司的xc164cs型号的16位单片机可以实现上述的控制,在两种控制方法的切换中是通过软件来实现的。这种控制方法的实现成本较低,控制的精度相对较高,因此具有相当大的市场。
[1]高静,杨贵杰,苏健勇.高性能低成本滚筒洗衣机用PMSM矢量控制系统[J].微特电机,2010,10(4):1-5.
[2]郭仲奇,罗德荣,曾智波,等.一种内置式永磁同步电机弱磁控制方法[J].电力电子技术,2011,45(3):1-4.
[3]Giulii Capponi F,De Donato G,Del Ferraro L.Brushless AC Drive Using an Axial Flux Synchronous Motor with Low Resolution Position Sensors[C]∥Proc of IEEE 35th Annual Power Electronics Specialists Conference,2004:2287-2292.
[4]Parasiliti F,Petrella R,Tursini M.Low Cost Phase Current Sensing in DSP Base AC Drives[C]∥ISIE,1999:1284-1289.
[5]Takahashi I,Noguchi T.A New Quick-response and Highefficiency Control Strategy of an Induction Motor[J].IEEE Trans on Industrial Applications,1986,22(5):821-827.
[6]胡军飞,卓放,苏彦民.基于DSP的交流电机矢量变换控制[J].电气传动自动化,1999,23(2):11-14.
[7]Tsugtoshi Ohtani.Vector Control of Induction Motor Without Shaft Encoder[J].IEEE Trans.on Industry Applications,1992,28(1):137-163.
