输电线路除冰机器人基于小波矩及SVM的障碍物识别研究*
2012-08-14曹文明王耀南文益民
曹文明,王耀南,文益民
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.桂林电子科技大学 计算机科学与工程学院,广西 桂林 541004)
2008年1 月我国南方数省输电线路遭遇历史上罕见的冰雪灾害,导致湖南、湖北、江西、浙江等地的电网发生倒塔、断线、覆冰闪络等多种灾害.雪灾造成国家电网公司直接财产损失达104.5亿元,灾后电网恢复重建和改造需要投入资金390亿元[1].线路大量覆冰就是造成此次电力损失的主要原因,而采用人工除冰的方法不仅效率低,而且对电力工人的生命安全造成了极大的威胁,因此研究输电线路在线除冰机器人替代人工除冰,对于保护我国电网的安全运行和电力工人的生命安全具有极其迫切的现实意义.
高压输电线路上的防震锤、悬垂线夹、耐张线夹等部件都是线路安装中必要的附件,但是对于在线路上行走的除冰机器人来说,就构成使其不能平坦行走的障碍物,所以障碍物的检测识别是除冰机器人在线路上自动行走的前提条件,是越障动作前的首要准备工作.
本文针对除冰机器人自身结构以及高压线路工作环境的特点,设计一种基于视觉的智能障碍物识别方法.方法中利用小波多尺度分析工具获得稳定的障碍物图像特征,再利用SVM强大的分类能力进行目标识别,结合两者的优点提高障碍物识别精度和速度,实现机器人对障碍物的实时感知.
1 机器人工作原理与工作环境介绍
1.1 机器人结构与工作环境
除冰机器人结构及其所在的220kV输电线路工作环境,如图1所示.为了实现在输电线上行走与越障,本体设计为两臂轮爪式结构,手臂末端有行走轮和抓线夹.行走轮凹面卡在导线上滚动行走,抓夹在本体越障或暂停时夹紧导线防止整体打滑.手臂前端设有开合式除冰机构,遇到导线覆冰时驱动除冰刀切削覆冰,使脆性的覆冰掉落下来;下端是控制箱,内置蓄电池和控制机构.控制板经I/O与外围设备相连,控制机器人整体的运行.其中,板载视觉传感器用来观察外部环境,包括:两手臂下部两个观察像机、控制箱上部前端的观测像机.前者观察手臂的空间运行位置;后者观察机器人前方各种障碍物和其他路况信息,典型障碍物有防震锤、悬垂线夹、耐张线夹等.
1.2 基于环境的应用设计
如图1所示,机器人箱体上部、前端的CCD像机用来观察前方各种障碍物,它的光轴与机器人前进方向夹角约为30度,这样安装的优点是:像机倾斜向上拍摄,不但可以拍摄到障碍物,而且拍摄背景是以天空为主的工作背景,背景单调的图像可以减少对前景目标识别干扰、降低识别复杂度.当然在实验室环境下,是以天花板为主的背景.像机拍摄到的常见线上障碍物灰度图像如图2所示.
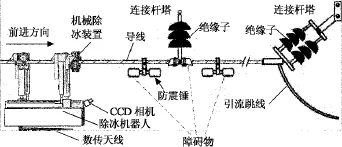
图1 220kV除冰机器人运行环境Fig.1 The environment of 220kV single split transmission line that deicing working on

图2 像机拍摄的障碍物灰度Fig.2 Grayscale images of camera photographed
从图2可以看出,防震锤、悬垂线夹、耐张线夹等障碍物既没有丰富的表面纹理,也无鲜明的颜色特征,不利于图像的分析和识别.但是仔细观察几组障碍物图像后,发现这几种障碍物的形状与轮廓相差很大,如果能够去掉环境中光线和背景的影响,然后利用障碍物外形轮廓特征的差别就可以判断出障碍物的存在及其类型.基于这一思想,本文设计了障碍物识别过程如图3所示.

图3 障碍物识别流程图Fig.3 Flow chart to identify obstacle
2 障碍物图像边缘检测与计算
2.1 图像预处理
在高压输电线路特殊工作环境中行走时,机器人一方面受到外界光线和输电导线强电磁场干扰;另一方面,本体电机动力输出时产生振动影响,机器人工作时常处于一种振动状态,像机拍摄的原始图像不够清晰,图像中混入了不必要的光照和振动噪声,图像质量达不到识别要求.为了去除干扰、达到目标检测的目的,有必要对障碍物图像进行中值滤波、膨胀和腐蚀等预处理措施.图2所示障碍物图像进行预处理后,结果如图4所示.处理后的图像去掉了许多噪声点和线条状干扰小块.虽然看上去图像变得模糊了一些,但也平滑了一些由于光线过亮所形成的亮点,障碍物目标区域像素差异大大降低,这有利于后续图像二值化和图像边缘提取.
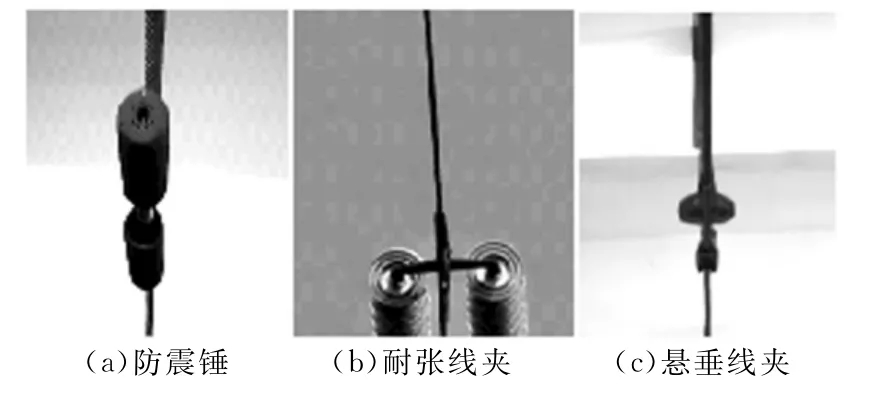
图4 障碍物图像预处理结果Fig.4 Result after images pretreated
2.2 图像二值化处理
在各种阈值优化分割方法中,OTSU算法[2]提出基于类间方差最大化分割法被公认为是最佳阈值分割算法,它根据图像的灰度特性把图像分成背景和目标两类,然后计算让两类间的方差取得最大的参数作为最佳阈值,再利用最佳阈值分割得到效果良好的二值化图像.
2.3 基于小波模极大值算法提取图像的边缘
图像小波变换在边缘检测中的优点是,在时域与频域中具有良好的局部特性[3],所以用多尺度小波变换检测图像边缘,可以很好地解决噪声抑制和图像边缘细节提取精度之间的矛盾.对图4进行二值化处理后,再用小波模极大值算法提取图像的边缘,结果如图5所示.从图5的边缘图像可以看出,障碍物边缘图像比较连续,取得了较好的边缘效果.
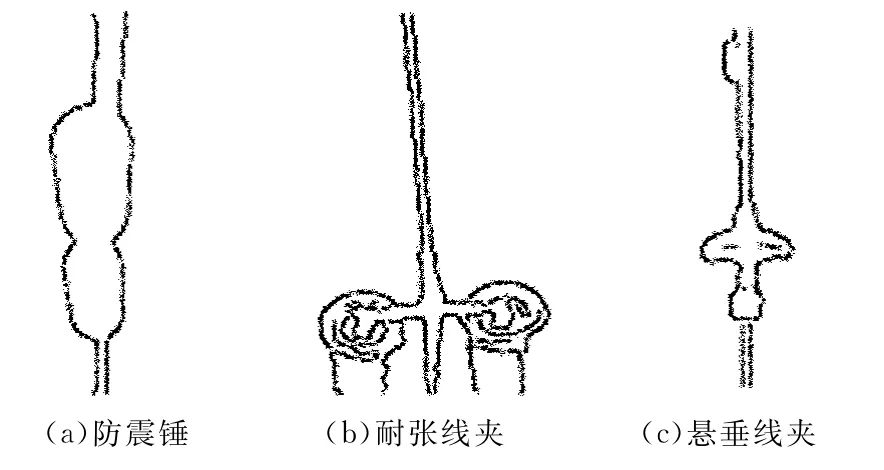
图5 障碍物图像边界的提取Fig.5 Edge of obstacle images
3 障碍物图像的小波矩特征提取
除冰机器人在线行走时拍摄的图像受到各种因素干扰.一方面,受风的吹动和机体振动的影响,拍摄像机中轴方向与导线方向存在一定的夹角,实验表明这个夹角变化范围在一个小范围内变动(一般在-6°~6°).另外,机器人在向障碍物方向前进时离障碍物距离不断变化,障碍物在摄像机中的成像大小发生变化,逐渐由小至大、使目标区域在图像中发生缩放变化.这些因素使得障碍物在图像中的位置、方向和大小发生变化,因此需要寻找一种具有平移、旋转和缩放不变性的图像特征作连续图像中固定目标物存在的识别依据,而图像的不变矩就是一种提取图像中具有平移、旋转和缩放不变性的数学特征,是解决目标区域几何失真的有效方法[4].小波矩就是一种结合矩特征和小波特征的新型矩特征,它利用小波多尺度分析能力对图像局部形状进行特征描述,在图像识别中既考虑全局信息又兼顾细节信息,因此小波矩具有很好的抗干扰和易分辨性,本文选取以小波矩特征作为障碍物识别分类的根据.
3.1 图像矩特征的一般表达形式
二维图像连续函数为f(x,y),则它在直角坐标系下的(p+q)阶几何矩定义为:

为了得到旋转不变性的图像矩值,令x=rcos θ,y=rsinθ,将式(1)进行极坐标变换,得到矩特征的一般表达式:

式中:gp(r)为变换核的径向分量,而ejqθ是变换核的角度分量.令Sq(r)=∫f(r,θ)ejqθdθ,则式(2)变为:

为了实现图像的平移、缩放不变性,需要对图像f(x,y)进行归一化处理,先求出f(x,y)的质心(,),将坐标原点移至质心,使f′(x,y)=f(x+,y+).通过这样的变换f′(x,y)就具有了平移不变性,然后求出图像的零阶矩y)dxdy);定义图像的缩放比例因子对图像进行尺度缩放变换得到fS(x,y)=f(ax,ay),则fS(x,y)具有缩放不变性.综上所述,经过平移和尺度变换后具有平移、尺度不变性.
将式(3)中的小波函数gp(r)用φm,n(r)来替换就得到小波矩,定义为:
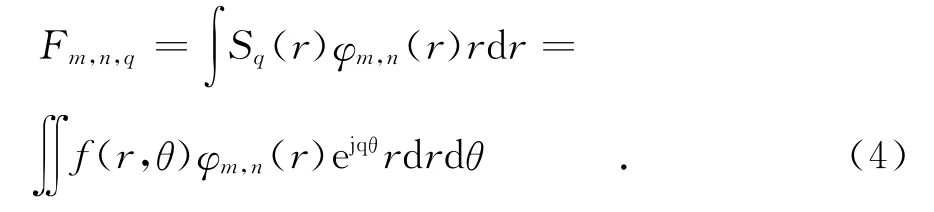
3.2 图像小波矩的构造
式(4)中,对于某一固定的r,∫f(r,θ)ejqθdθ代表图像f(r,θ)在相位空间[0,2π]中的第q个频域特征(q=0,1,2,…,N),利用不同的尺度因子m、位移因子n,φm,n(r)可以遍及整个径向空间[0,1],这是因为

式中:N=3,α=0.697 066,f0=0.491 77,σ2w=0.561 145.所以:

式中:m=0,1,2,3,…;n=0,1,…,2m+1;选择不同的m,n就可得到图像的全局信息或局部信息.
3.3 图像小波矩特征的选择与优化
在图像识别中引入一组小波矩进行目标识别和分类.由式(4)的定义可知,当适当改变式中频域特征参数q、尺度因子m、位移因子n时,可得到很多组小波矩特征数据,但过多特征信息不利于神经网络进行识别,不仅使特征获得的代价增加,而且庞大的神经网络系统将降低计算性能.因此需要对大量原始特征数据进行分析、降低其信息冗余量,选择一组较优的小波矩组合成实用的特征向量,以减小模式识别代价、提高识别实时性.
本文采用次优搜索算法中的增l减r法(l-r法)[6]进行特征选择.l-r法考虑了当前特征组与待选特征分量间的相关性,它克服了顺序前进法SFS和顺序后退法SBS的筑巢效应[6],即特征一旦被加入或者被剔除,以后将不再改变的缺点,所以它能取得更好的特征.
定义两类xk,xl的距离度量:

式中:n为提取特征向量的个数;采用自下而上的算法,即l>r,算法如下:
1)假设已选m个特征组成一个特征组Xm=(x1,x2,…,xm),在余下n-m个特征中选一个xi(i=1,2,…,n-m)分别与已选特征组合,按J值大小排列:

从中选入特征x1,照这样逐个选入l个特征得到新的特征组Xm=Xm+l,并置m=m+l.
2)在特征组Xm中剔除一个特征xj(j=1,2,…m),若:

从中剔除x1,照这样逐个剔除r个特征组成新特征组Xm=Xm-r,置m=m-r.若m=n,则算法终止,否则转步骤1).
按照特征选择法选择6个局部最优小波矩值作为特征向量,分别为:‖F110‖,‖F130‖,‖F220‖,‖F310‖,‖F311‖,‖F312‖.表1和表2列出了图像计算后的6维局部最优小波矩特征向量.
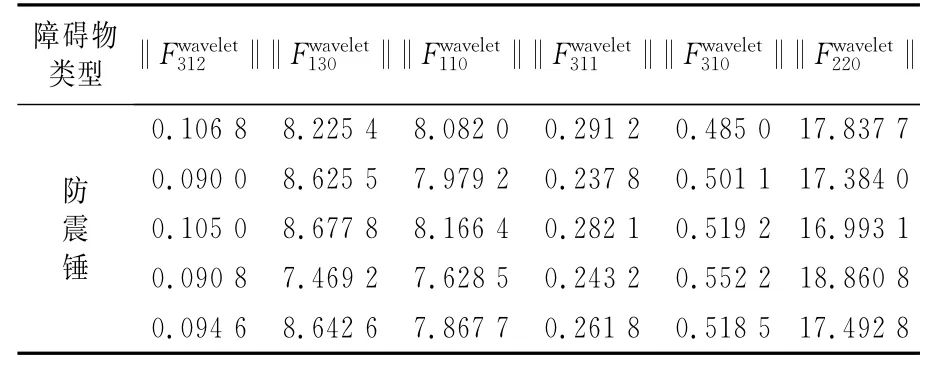
表1 防震锤边缘图像的小波矩特征向量Tab.1 The wavelet moments result of edge images by counterweight
4 支持向量机分类原理与分类方法
4.1 SVM分类原理
利用普通人工神经网络做障碍物识别,将遇到一些制约问题:如何确定网络结构、过学习与欠学习、需要大量的学习样本等.而SVM是基于结构风险最小化的统计学习算法[7],在解决小样本学习方面具有很大优势并得到了广泛应用.

表2 3类障碍物边缘图像的小波矩特征向量Tab.2 The wavelet moments result of edge images by three type obstacles
设n维实数空间中,线性可分样本集(xi,yi),i=1,…,n,y∈ { +1,-1},其中xi∈Rn是输入矢量,yi是 分类标识.yi=1的矢量(xi,yi)为第1类;yi=-1的矢量(xi,yi)为第2类.利用最优分类超平面〈ω,x〉+b=0把两类数据分开,此时两类间隔等于,使间隔最大等价于使‖ω‖2最小,其中ω和b分别为权矢量和阈值.对于线性不可分样本,还可允许一定的错误分类,引入非负松弛因子εi描述矢量(xi,yi)被误分的程度,分类条件放宽为yi〈w,xi〉+b+εi≥1,i=1,2,…,l,为了限制样本错误分类,引入错误惩罚因子C,它希望误分类程度尽可能小.这样问题转化为求以下约束条件的极小值:

该问题的对偶计算式[8]为:

对于非线性可分情况,通过适当的核函数K(xi,yi)可把(xi,yi)非线性变换映射到高维特征空间,在特征空间中问题变得线性可分.所选择的核函数K(xi,xj)=〈φ(xi),φ(xj)〉可以代替最优分类面的点积,间接地将输入空间中两个矢量的内积映射为高维特征空间的内积,相对容易求解最优超平面.式(11)问题转化为求如下问题的最优化:
本文选用径向基(RBF)核函数,即:

式中:γ为核函数参数,运用序列最小最优化(SMO)[9]算法快速解出分类超平面系数,进而可求解式(12)中的最优分类超平面问题.
4.2 SVM多分类算法
除冰机器人在实际工作中遇到需要识别的障碍物在3种以上,如图1所示障碍物就有5种,所以需要采用能解决多分类问题的多个支持向量机.常用的SVM多分类方法有:一对多、一对一、有向无环图[10].实验比较发现一对一分类法比一对多分类法速度快,而分类精度比有向无环图方法高,所以本文选择一对一算法实现多类障碍物的分类.
5 实验方法与结果分析
5.1 SVM分类过程
刚开始SVM网络中没有任何经验知识,需要经过样本训练获取知识,再利用具有分类功能的SVM进行图像分类.主要步骤如图6所示.

图6 SVM分类器分类过程Fig.6 Recognition course of SVM classifier
为了优化实验,对关键数据进行优化:
1)障碍物样本数据的选择
选取机器人在实验线路行走与越障时,拍摄的各种障碍物图像,选择多组障碍物图像作SVM训练与测试的样本.如图7所示,选择具有不同偏角、不同距离拍摄的障碍物图像作为实验样本,而且注意有区分地选择同类障碍物样本,且同类样本大小、方位都有所不同.其中,选取280组作训练样本、80组作测试样本,并计算它们的小波矩特征向量以备SVM实验使用,结果如表1和表2所示.
2)核函数参数的优化
径向基(RBF)核函数是SVM的普适核函数,但是为了使SVM适应于任意分布的样本、具有更好的推广能力,需要配上合适的核函数参数.如图8所示,在实验中比较不同(C,γ)组合下的分类正确率.经反复训练和测试,发现核函数参数C=27.36,γ=0.327时,训练SVM分类器的分类效果最佳,保存这一结果并应用在实际分类中.
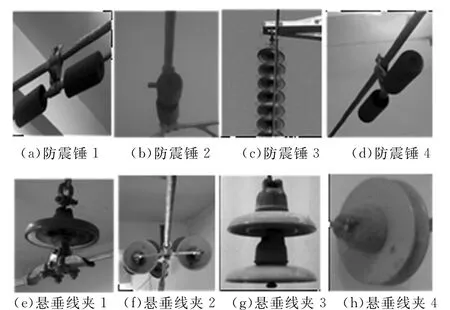
图7 SVM训练样本图像Fig.7 Training sample images of SVM classifier

图8 参数(C,γ)取不同值的分类正确率Fig.8 Classification percentages according to coefficients(C,γ)
5.2 实验结果分析
机器人在线行走时,不同时刻拍摄的同种与不同种障碍物图像是动态变化的,为了验证SVM的识别效果.选取不同距离条件下,拍摄多组同种与不同种障碍物图像进行比较,以防震锤为例,选取5张图像做试验,同时测量了这些图像的拍摄条件,分别是:距像机6.20m,拍摄方向与导线直线方向左偏4.5°、左偏0.2°、右偏3.9°;距像机4.82m,左偏3.8°、右偏4.1°.分别算出它们的小波矩特征值,结果如表1所示,从表1可以看出,在拍摄距离和拍摄角度不同的条件下,防震锤的小波矩特征各分量之间的差距不大.从表1可知,同种障碍物图像的特征向量差别不大,而不同障碍物间的特征向量差别还有待比较.
用表1相同方法,又分别计算了耐张线夹、悬垂线夹、绝缘子等障碍物的图像.然后选取它们的特征向量进行比较,结果如表2所示,可以看出3种障碍物图像间的小波矩特征向量差别较大.
从这两组实验的结果比较可以看出:同类障碍物具有近似不变的特征向量,而不同障碍物间的特征向量差别较大.根据前面的介绍,这一特点很适合利用SVM来分类.首先,用大量典型障碍物的样本图像训练SVM网络,把它们的特征向量和相应种类号输入SVM训练,然后SVM就可对新输入的障碍物图像进行分类了,实验分类效果如表3所示.

表3 不同障碍物的识别效果Tab.3 Result of recognition of different obstacles
6 结 论
针对除冰机器人特殊工作环境需要,提出了基于小波矩及SVM技术的障碍物识别方法.实验表明机器人能有效地感知遇到的各种障碍物,为机器人自主在线行走和越障准备了条件.
[1] 王超,魏世民.高压输电线上除冰机器人的系统设计[J].机械工程与自动化,2010(1):148-149.WANG Chao,WEI Shi-ming.Design of a robot for deicing high voltage transmission lines[J].Mechanical Engineering &Automation,2010(1):148-149.(In Chinese)
[2] OSTU N A.Threshold selection method from gray-level histogram[J].IEEE Transactions on Systems,Man,and Cybernetics,1979,9(1):62-66.
[3] 何通能,贾志勇.基于小波矩的车牌字符识别研究[J].浙江工业大学学报,2005,33(23):170-172.HE Tong-neng,JIA Zhi-yong.A study of license plate character recognition based on wavelet moment[J].Journal of Zhejiang University of Technology,2005,33(23):170-172.(In Chinese)
[4] HU M K.Visual pattern recognition by moment invariants[J].IEEE Transactions on Information Theory,1962,2(8):179-187.
[5] UNSER M,ALDROUBI A,EDEN M.Ontheasymptotic convergence of B-spline wavelets to gabor functions[J].IEEE Transactions on Information Theory,1992,38(2):864-872.
[6] 边肇祺,张学工.模式识别[M].北京:清华大学出版社,2000:253-257.BIAN Zhao-qi,ZHANG Xue-gong.Pattern recognition[M].Beijing:Tsinghua University Press,2000:253-257.(In Chinese)
[7] 李庚银,王洪磊.基于改进小波能熵和支持向量机的短时电能质量扰动识别[J].电工技术学报,2009,4(24):161-166.LI Gen-yin,WANG Hong-lei.Short-time power quality disturbances identification based on improved wavelet energy entropy and SVM[J].Transactions of China Electrotechnical Society,2009,4(24):161-166.(In Chinese)
[8] 沈琳琳,纪震.采用精选Gabor小波和SVM分类的物体识别[J].自动化学报,2009,4(35):350-355.SHEN Lin-lin,JI Zhen.Gabor wavelet selection and SVM classification for object recognition[J].Acta Automatica Sinica,2009,4(35):350-355.(In Chinese)
[9] JOHN C.Fast training of SVM using sequential minimal optimization advances in kernel methods support vector machine[J].MA:Cambridge Boston,MIT Press,1999.
[10] 申宇皓.小波包变换和支持向量机模拟电路故障诊断方法[J].火力与指挥控制,2009,34(11):154-157.SHEN Yu-hao.Research on method of analog circuit fault diagnosis based on wavelet packet transform and SVM[J].Fire Control &Command Control,2009,34(11):154-157.(In Chinese)
