多参数水质监测仪流路系统设计
2012-07-26温志渝魏康林陈松柏
郭 建 温志渝 魏康林 陈松柏
(新型微纳器件与系统技术国防重点学科实验室1,重庆 400044;微纳系统及新材料技术国际研究中心2,重庆 400044)
0 引言
多参数水质监测是现代环境科学技术的重要发展方向之一[1],而对多参数水质监测仪器而言,流路系统的设计是关键技术。流路系统必须具有多样品多试剂顺序进样、流路切换和试样的精确抽取等功能。现有的流路系统大都采用基于多位阀与注射泵的顺序注射流路[2]。该流路虽然具有试样间多流路通道快速切换和试样的高精度抽取功能,但注射泵的价格很高,如果采用基于多位阀与注射泵的顺序注射流路系统来设计在线水质检测仪器,就会增加成本,难以满足产业化的要求[3]。
为此,本文提出一种基于微电子多位阀与微型步进电机蠕动泵的集成化多样品多试剂顺序进样、顺序检测流路系统。该流路具有小体积、低功耗、低成本的优势。经反复在线测试,系统满足快速切换(切换时间≤2 s)和精确进样(准确度为±2%)的在线水质检测要求,且流路系统具有高效自动清洗的功能,可以极大程度地降低交叉污染,保证水质检测精度。
1 流路系统设计
1.1 流路总体设计
针对多个水质参数的检测,各个参数对应的样品和反应试剂通过多位阀的切换和经蠕动泵的抽取进入流通检测池。在流通池内反应平衡后,即通过光谱分析检测样品中该参数的含量,然后清洗流路系统(即公共流路和检测池),并依次进行下一个水质参数的检测。按照项目要求,系统以氨氮、阴离子表面活性剂、Cr6+(六价铬)、化学需氧量、Pb2+(铅离子)、总酚和总磷7个水质参数为检测对象。
为了实现对7个水质参数进行在线水质监测的要求,设计了以AT89C55单片机为核心控制器的流路控制系统,分别控制多位阀对试样的流路切换和蠕动泵对试样的精确抽取。
流路系统如图1所示。流路系统选择Valco公司的24位阀,流路通径为0.6 mm,无死体积,交叉污染小,适合有效的流路切换和高精度进样[4]。24位阀的各个流路通道(定子)分别与蒸馏水、待检水样、空气以及各个水质参数对应的标准样品溶液、反应试剂相连通。其中,公共通道(转子)连接微型步进电机蠕动泵,控制转子的转动即可实现各个试样间的流路切换,各参数对应的反应样品与试剂通过蠕动泵的精确定量抽取进入流通检测池。
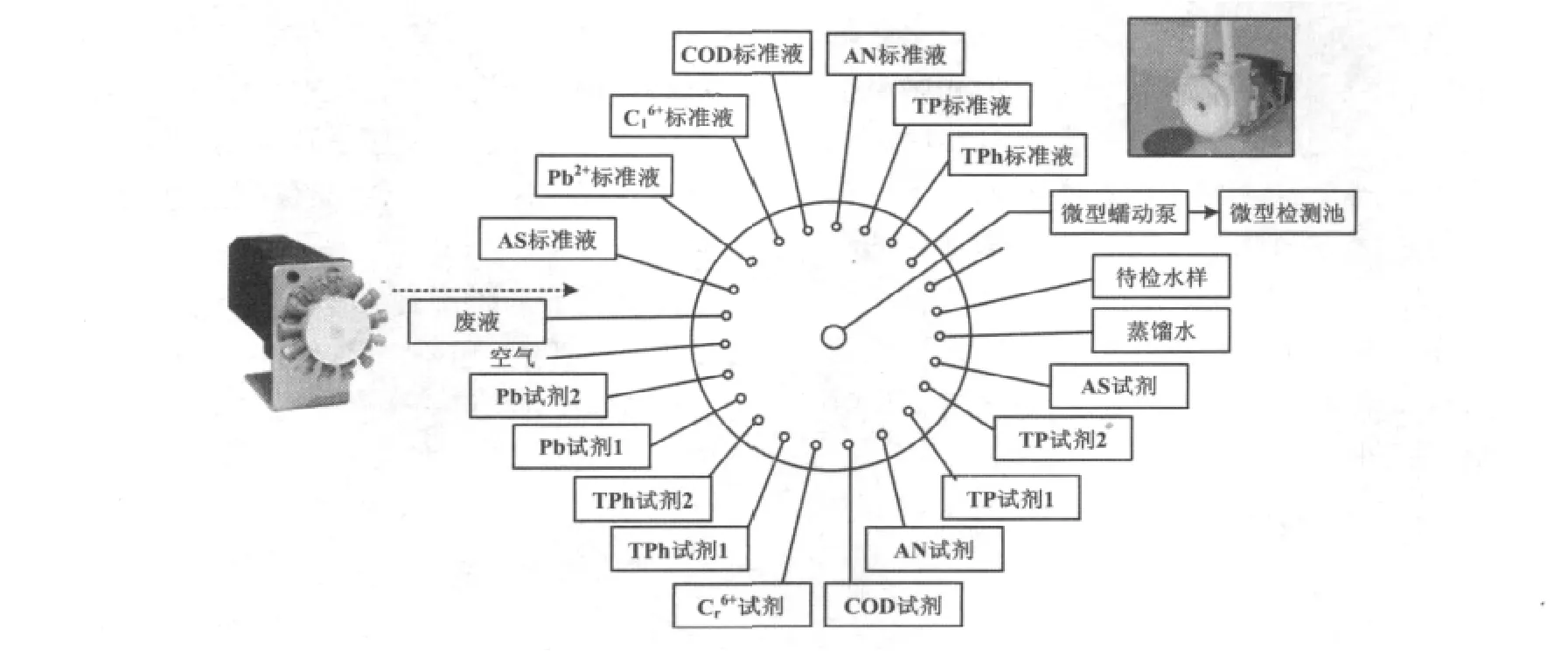
图1 流路系统框图Fig.1 Block diagram of flow path system
1.2 流路切换模块设计
24位多位阀具有多通道选择切换的功能,其转子可相对定子准确地以任意15倍数的角度在正、反向旋转。阀的公共通道与转子连通,转子在步进电机的带动下正反转动,即可与阀上的各定子连通,从而使蠕动泵通过公共通道抽取不同的试样,实现流路切换功能[5]。多位阀的工作原理示意图如图2所示。

图2 多位阀工作原理Fig.2 The working principle of multi-position valve
针对Valco公司的24位阀驱动器的控制,本文设计了基于AT89C55单片机的多位阀自动控制系统。系统通过8位BCD码来实现多位阀公共口(转子)与其他各通道(定子)连接的流路切换控制。
单片机的P0口通过上拉电阻直接与多位阀控制器的IN口相连,把转子的转动命令(即所需要转到的位置)发送给多位阀驱动器。
单片机的P2.0口与多位阀驱动器的DIR命令端口连接,可以向驱动器发送控制多位阀的转向命令,使其以最短途径转到指定位置。如果转到位置与现在位置之差小于12位,则多位阀正转到指定位置;如果转到位置与现在位置之差大于12位,则多位阀反转到指定位置。
单片机的P1口与多位阀的OUT口连接,读出转子现在的位置,从而判定多位阀的走位是否正确,如果不正确,则通过ERROR发送中断。单片机的P2.1端口用来给驱动器HOME端口发送复位信号[6]。多位阀控制模块如图3所示。
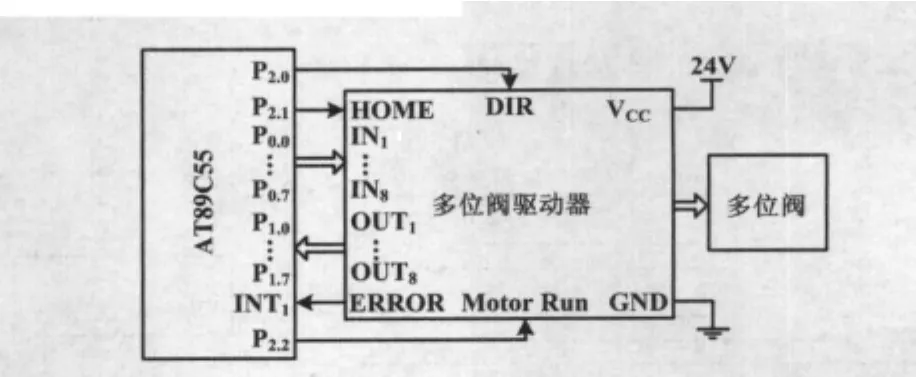
图3 多位阀控制模块Fig.3 Multi-position valve control module
1.3 进样模块设计
微型步进电机蠕动泵采用的是高精密两相步进电机驱动,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速和停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响;可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时,可通过控制脉冲频率来控制电机转动的速度和加速度,以达到调速的目的。
电机的驱动电压为12 V,最大流量22 mL/min,在连续运转的情况下,电机的寿命为5000 h。电机采用全新的电流控制技术实现电流的精确控制,其有效降低了输出力矩脉动、提高了细分精度;并且可以将电机的损耗降低25%,达到减小电机温升的效果。
AT89C55单片机与微型步进电机蠕动泵的驱动板的连接图如图4所示。
图4中,RST为复位控制,EN为使能控制,DIR为方向控制,STEP为脉冲个数及频率控制。编写控制程序,单片机通过P2.6端口向蠕动泵驱动模块的STEP端口发送精确脉冲信号。通过改变脉冲信号的频率来更改蠕动泵的进样速度,在需要系统清洗的时候使用最快速度,需要精确进样的时候使用正常速度,以保证进样精度。通过改变脉冲个数控制蠕动泵抽取所需的溶液量,反复进行试验,直到微型蠕动泵的进样误差在1%以内[7]。单片机的 P2.5端口控制蠕动泵驱动板的DIR端口,可改变蠕动泵的旋转方向,实现对仪器中导管的反冲清洗,减小各试剂间的交叉污染。
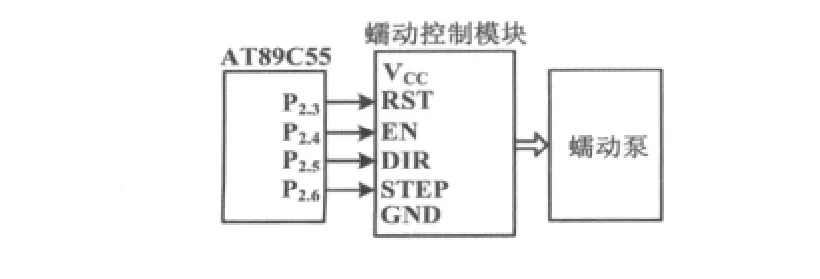
图4 蠕动泵控制模块Fig.4 Peristaltic pump control module
2 流路系统软件设计
系统流路控制流程如图5所示。
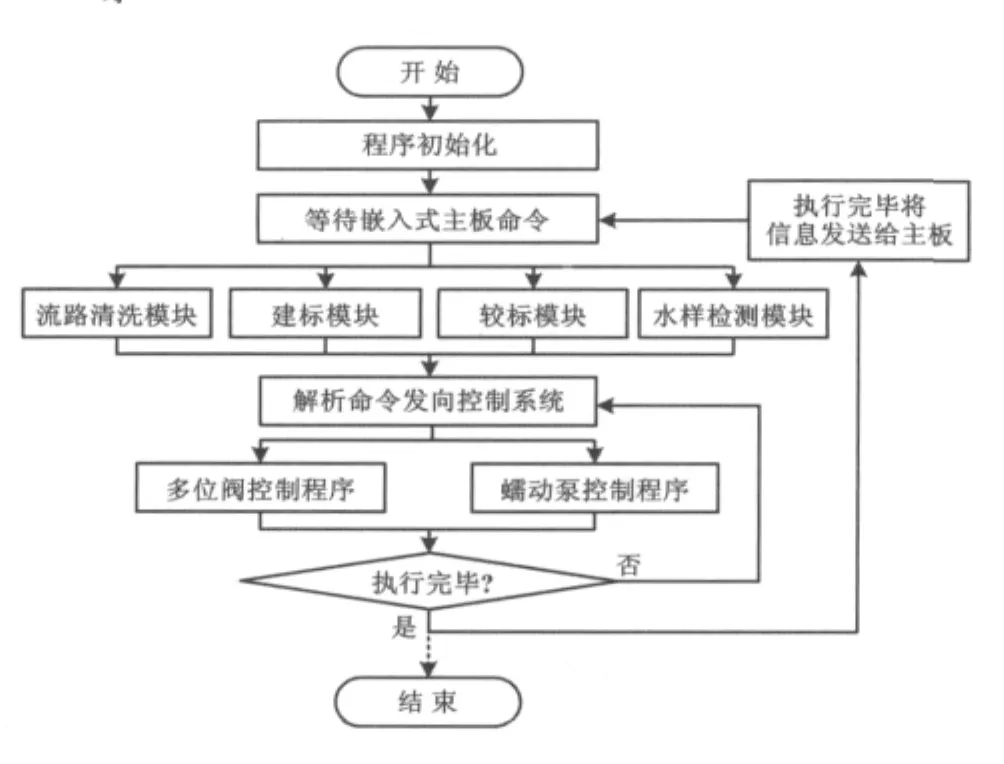
图5 流路软件流程图Fig.5 The flowchart of flow path software
单片机控制软件主要包括系统流路清洗模块、系统建标模块、系统较标模块和系统检测模块。各模块又由多位阀控制函数和蠕动泵控制函数组合而成[7]。
①流路清洗程序模块主要是清洗流路系统中的管道和样品检测室。
②系统建标模块是引进各种标准液和试剂到检测室,以建立浓度与吸光度的标准曲线。
③系统较标模块是引进已知浓度溶液和相应试剂到检测室,以检验标准曲线的准确性。
④系统检测模块是引进待检水和相应试剂到检测室检测。
程序通过串口与嵌入式系统进行通信,嵌入式系统发送各种指令使流路系统执行相应的工作,实现了流路的全自动化。该程序设置方便、灵活,控制指令可任意调用;程序稳定可靠,能保证进样的精度和测试效果。
本文设计的该流路的各个入口可重新组合实现流路的二次开发,并用于测量其他不同的各种指标,加上良好的通信接口,可大大扩展该流路系统的应用范围。
3 试验
3.1 抽取精度试验
根据测量参数的标准溶液和反应试剂的进样要求,流路系统需要能够精确抽取测试所需的体积为0.3、0.6、0.9、1.2、1.5、3(单位:mL),为此,进行了流路系统抽取试验。对各体积进行5次重复抽取的试验数据表如表1所示。本试验是通过高精度的电子天平读取数据,读取的准确度高、误差小。
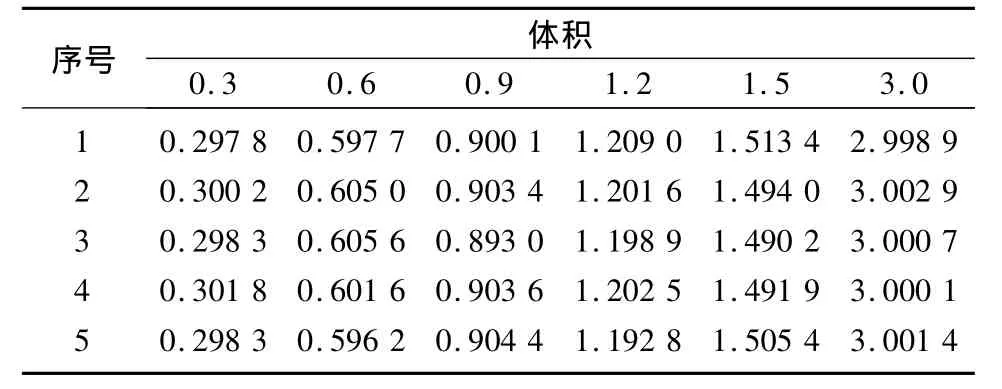
表1 精度抽取试验数据Tab.1 The experimental data of extracting precision mL
从表1的测试数据可以看出,各次测量与理论值(期望值)的相对误差的绝对值小于2%(包括测量均值的偏差为0.6%),证明准确度很高,即流路系统具有很高的进样准确度;其次,相对均值的误差呈现出非常标准的随机性,方差为 0.01,测量精密度很高[8],证明流路系统具有很好的重现性。
3.2 标准溶液测试试验
为验证流路系统的流路切换和试样的精确抽取的功能,用多参数水质检测仪对COD建标进行了试验,分别测试总磷浓度为 0、0.05、0.1、0.15(单位:mg/L)的标准液的吸光度。试验采用双波长测试法[9],主波长为620 nm,参考波长为500 nm,则吸光度与浓度的直线方程为:

式中:A620、A500为待测物在620 nm、500 nm处的吸光度;K为灵敏度;C为待测物浓度;B为光程,水质检测仪的光程为2 cm。
由多参数水质监测仪测量作出的标准曲线如图6所示。

图6 总磷的标准曲线Fig.6 The standard curve of TP
由式(1)得出ΔA=1.2565C,直线拟合的相关系数R2=0.9967,达到了检测要求,说明该流路能够稳定准确地实现流路切换、精确进样和系统清洗等功能。
4 结束语
为满足多参数水质监测仪测试7种参数的要求,本文设计了基于微电子多位阀和微型步进电机蠕动泵的集成化多样品多试剂顺序进样和顺序检测流路系统。该流路系统进样体积小、精度高,试剂间的交叉污染小,可节约试剂和减少废液。
系统完全由微机控制,不同的分析过程不需改变流路体系结构,实现了流路系统的全自动化控制。该流路系统特别适合于对流路要求较多、可靠性和自动化要求较高的过程分析。
[1]王奎兰,吴清平,邓金花,等.水质快速分析技术现状及发展趋势[J].现代仪器,2005(5):54-56.
[2]周娜,赵燕,谢振位,等.顺序注射及其在环境监测中的应用进展[J].现代科学仪器,2005(6):21 -27.
[3]Abulkibash A M.Sequential injection spectrophotometric determination of cyanide[J].Flow Injection Anal,2007,24(1):17 -21.
[4]魏彦林,马惠昌.十六孔阀的功能组合及其在流动注射分析中的应用[J].分析仪器,2004(3):34 -40.
[5]成俊杰,于靖军,孙明磊,等.新型顺序注射分析系统的研制[J].军民两用技术与产品,2007(11):47-48.
[6]张友德,赵志英,涂时亮.单片微型机原理、应用与试验[M].上海:复旦大学出版社,2003.
[7]Wang X,Huang K Z,Xu B,et al.Design for step motor control system of automatic biochemistry analyzer[C]//8th International Conference on Electronic Measurementand Instruments, ICEMI,2007:1607 -1612.
[8]杨虎,刘琼荪,钟波.数理统计[M].北京:高等教育出版社,2004.
[9]费学宁.现代水质监测分析技术[M].北京:化学工业出版社,2005.
