GPS接收机载波跟踪环设计与分析
2012-07-13柴俊栓张晓辉
柴俊栓,张晓辉
(中国空空导弹研究院 河南 洛阳 471009)
弹载GPS接收机在进行大机动飞行时,由于跟踪的GPS信号动态变化范围较大,因此要求GPS接收机的跟踪环路具有较宽的带宽,以保持卫星信号的稳定跟踪。但是,跟踪环路带宽的增大,又增加了接收机环路对干扰噪声的滤除困难,削弱了GPS接收机的抗干扰能力,严重时噪声引起的跟踪误差会大大降低接收机定位精度。显然动态性能要求的环路带宽和噪声要求的环路带宽是一对矛盾体。
笔者在系统地分析影响GPS信号动态性能的主要参数热噪声、晶振Allan相位噪声、晶振振动相位噪声、电离层闪烁相位噪声和动态应力的基础上,主要解决了如何依据动态环境和GPS信号载噪比情况来设计GPS接收机的码和载波环路的带宽,并使系统性能达到最佳的问题。
1 GPS接收机跟踪环设计
GPS接收机要获得导航数据,就必须同时对载波和伪码进行精确跟踪,这就需要两个跟踪环路来实现,即用来跟踪载波的载波跟踪环和用来跟踪码(C/A码)相位的码跟踪环。码跟踪环采用延迟锁定环(Delay Lock Loop,DLL);载波跟踪环采用相位锁定环(Phase Lock Loop,PLL)或者频率锁定环(Frequency Lock Loop,FLL);而这三者从本质上讲都属于锁相环[1]。
锁相环是一个相位跟踪系统[3],由3个基本部分组成:鉴相器(PD)、环路滤波器(LF)以及压控振荡器(VCO)。 PLL 基本结构如图1所示。鉴相器将输入信号相位θi(t)与反馈信号θf(t)进行比较,得到相位误差 εe(t),Vc(t) 经过环路滤波器处理得到控制信号Vo(t),Vo(t)控制压控振荡器改变输出相位。在误差控制信号的控制下,压控振荡器的频率变化至和输入信号频率一致,使环路锁定。
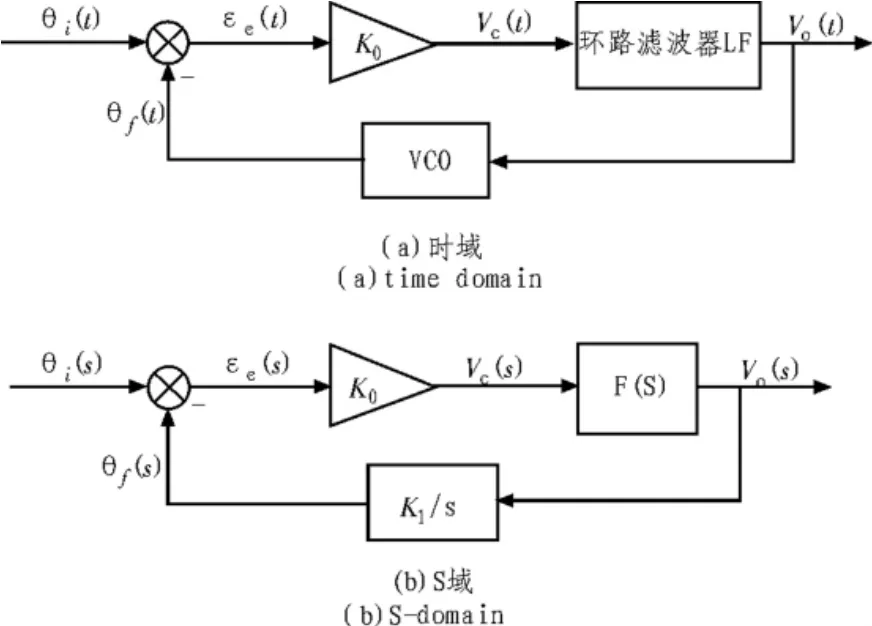
图1 锁相环基本组成原理框图Fig.1 Flow chart of phase lock loop
从图 1(b)中可以得到:

设K=k0k1,锁相环的传递函数H(s)定义为:

锁相环的误差传递函数He(s)定义为:

若环路闭环传递函数为H(s),可以定义环路的等效噪声带宽为:

环路等效噪声带宽可以很好地反映环路的滤除能力[2];带宽越小,环路的滤除能力越强。采用不同的阶数,其闭环传递函数1+(jω)也就不同,因此,求出的环路等效带宽也就不同。图2中给出了不同阶数的锁相环框图,表1中给出了不同环路阶数的最佳闭环传递函数、噪声带宽以及稳态误差的关系[3]。
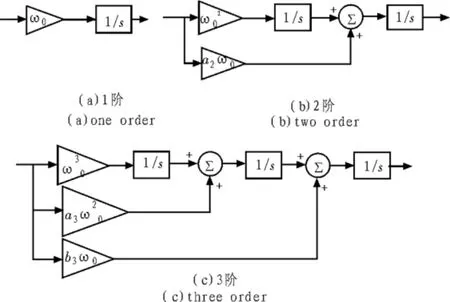
图2 不同阶数的锁相环框图Fig.2 Flow chart of different order phase lock loop
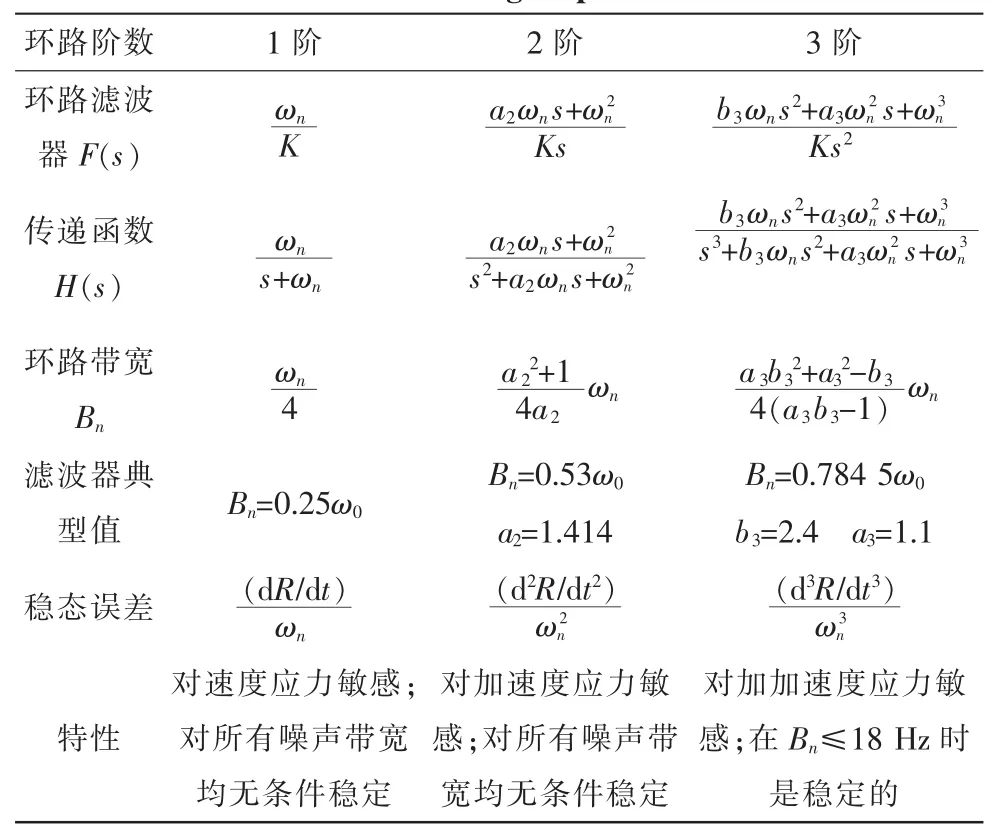
表1 不同阶数的最佳GPS跟踪环的特性表Tab.1 Characters of different order optimal GPS receiver tracking loop
锁相环的环路参数主要由环宽和阶数确定,只要这两个参数确定,整个锁相环的最佳参数就将确定。为满足弹载GPS高动态的要求,本文载波跟踪环使用2阶FLL辅助3阶PLL的方案。在动态较高时,跟踪环路转入由适应动态应力范围更大的FLL锁定,保证跟踪环的稳定跟踪;在动态较低时跟踪环由精度更高的PLL锁定,提高跟踪精度。
2 载波跟踪环动态性能分析
GPS接收机的动态性能主要受整个环路的跟踪门限限制;由于码跟踪环路受载波环路辅助,所以载波跟踪环的性能决定了接收机的动态性能。
1)锁相环动态性能
载波跟踪环的主要误差源包括热噪声、晶振相位噪声、电离层闪烁引起的相位噪声和动态应力误差[4]。载波锁相环的跟踪门限的经验取值为测量误差均方根的3σ值不超过 45°:

其中,σPLL为测量误差均方根;σtPLL为热噪声;σA为阿伦(Allan)偏差相位噪声;σv为由振动引起的振荡器相位噪声;θe为载波跟踪环路动态应力误差。
2)热噪声误差
锁相环的热噪声误差和环路的阶数无关,主要和环路的实现有关,载波跟踪环热噪声误差可以表示为:

其中,Bn为锁相环噪声带宽(Hz);T 为积分清除时间(s);C/N0为载波功率噪声密度比(dB-Hz)。 从式(6)可以看出,随着载波功率噪声密度比的增加,热噪声减小;随着积分清除时间的增加,热噪声增加。
3)晶振阿伦偏差相位噪声
晶振的短期稳定度是由阿伦偏差来确定的,它引起的相位噪声是主要的不稳定源。对于2阶、3阶锁相环,由晶振阿伦偏差引起的相位噪声分别为:

其中,θA2、θA3分别为2阶、3阶锁相环由晶振阿伦偏差引起的相位噪声(°);σA(τ)为晶振短期稳定度闸门时间的方差,其值通常为1×10-10或更好,无量纲;fL为GPS L1信号的频率,即1 575.42×106Hz;Bn2、Bn3分别为 2 阶、3 阶锁相环的环宽,Hz。
由式(7)可知,由晶振阿伦偏差引起的相位噪声随晶振短期稳定度闸门时间的方差的增大而增大,随锁相环的环宽增大而减小。
4)振动引起的振荡器相位噪声
GPS接收机在高动态载体中不免受到振动的影响,由振动引起的晶振相位噪声谱密度可以表示为:

其中,fL为 GPS L1信号的频率,即 1 575.42×106Hz;Sv(fm)表示作为fm函数的振荡器振动灵敏度,以每个g的Δf/fL表示,无量纲; fm为随机振动的调制频率,Hz;P( fm)表示作为fm函数的随机振动的功率曲率,g2/Hz。
假定随机振动的功率曲线从20 Hz到2 000 Hz是平坦的,其幅度为 0.005 g2/Hz,Sv=1×10-9parts/g,则由振荡器振动引起的相位噪声为:

由式(8)、(9)可知,振动引起的相位噪声随着环路的阶数增加而增加,随着带宽的增加而减小。通过减小晶振对加速度的灵敏度,可以减弱由振动引起的相位噪声,一般振动引起的相位误差小于1.5°。
5)动态应力误差
锁相环由于动态应力产生的误差由表1中的稳态误差得到,即由相位率、相位加速度、相位加加速度产生的误差分别通过1阶、2阶和3阶环路来近似,动态应力误差可表示为:
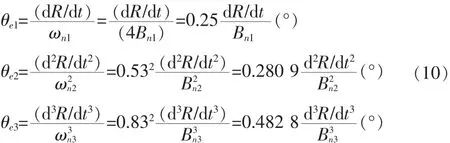
其中,θen为n阶锁相环的动态应力误差,单位°;dR/dt为1阶锁相环在视线方向的最大速度,(°/s);d2R/dt2为2阶锁相环在视线方向的最大加速度,(°/s2);d3R/dt3为3阶锁相环在视线方向的最大加加速度,(°/s3);Bnm为m阶锁相环的环宽(Hz)。
式(10)表明,动态应力误差取决于环路带宽和环路阶数。一阶环对速度应力敏感,二阶环对加速度应力敏感,三阶环对加加速度应力敏感,增大各环路带宽可适当减小动态应力误差。
6)锁相环动态性能门限
假定积分清除T=20 ms,对于二阶环路主要分析加速度的影响,图10给出了加速度为10 g情况下的带宽与相位误差曲线。
从图3中可以看出,在加速度为10 g的情况下,二阶环路对于30 dB-Hz的以下的信号不能跟踪,此时环路最小带宽为48 Hz,当输入信号信噪比为45 dB-Hz时,环路带宽最小可取到39 Hz。
因为三阶环路最大的带宽可取至18 Hz,否则将会引起环路不稳定。图4给出了带宽为18 Hz情况下的载噪比与相位误差曲线。
从图4中可以看出,对于三阶跟踪环路不能跟踪加加速度为20 g/s的信号。对于1 g/s信号的跟踪也要求载噪比在26 dB-Hz以上。

图3 二阶环路相位误差曲线Fig.3 2-Order phase lock loop phase-error curve
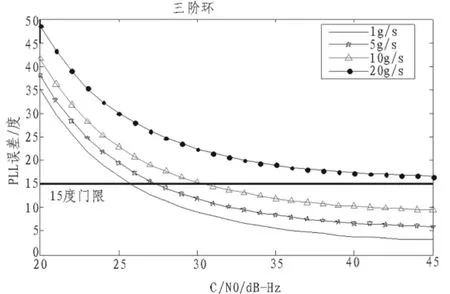
图4 三阶环路相位误差曲线Fig.4 3-Order phase lock loop phase-error curve
由以上分析,对于PLL来说,为了在高动态下保持锁定,须采用高阶环或其他手段。
锁频环动态性能:在锁频环中,主要误差源来自热噪声和动态应力,基准振荡器引起的频率颤动是小数量级的可以忽略不计[5]。对于采用叉积型鉴频器的锁频环牵引范围可以表示为1/T Hz。因此其跟踪门限可以表示为:

其中,σtFLL为热噪声颤动; fe为动态应力误差;T为积分清除时间。
锁频环的热噪声可以表示为:

其中,F=1,在高载噪比时;F=2在跟踪门限附近时。
由于FLL比同阶PLL跟踪环多了一个积分环节[6],所以其动态应力误差为:

采用与前面类似的方法,分析二阶锁频环的动态性能,对于二阶环由式(10),在 T=10 ms,C/N0=30 dB-Hz的情况下,可以得到动态性能曲线如图5所示。
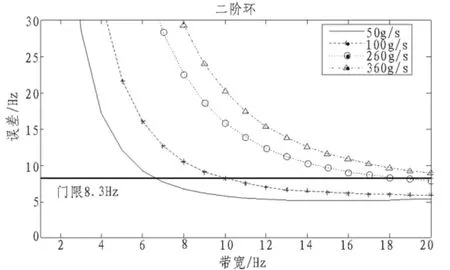
图5 锁频环动态性能曲线Fig.5 Frequency lock loop dynamic character curve
从图5中可以看出,2阶FLL比3阶PLL在相同噪声带宽和载噪比条件下动态应力好一个数量级。同样18 Hz带宽,FLL可以跟踪260 g/s的信号,而PLL在10 g/s的信号下环路就失锁了。另外,追踪100 g/s的GPS高动态信号,FLL带宽在10 Hz以上时满足要求。
3 结束语
从锁相环原理可以得出,只要环路的带宽确定,则环路的所有系数均可以确定。而环路的带宽与信噪比、载体的动态密切相关,对于FLL采用2阶环可以跟踪100 g/s的高动态信号,带宽为10 Hz;PLL的带宽设计为18 Hz来适应高动态,它可以跟踪10 g/s,载噪比为30 dB-Hz的信号。
[1]Parkinson B W,Spilker J J.Global positioning system:theory and applications[M].American Institute of Aeronautics and Astronautics,Inc.1996.
[2]Samama N.Global positioning:technology and performance[M].John Wiley&Sons,Inc.,Hoboken,New Jersey,2008.
[3]Floyd M.Gardner.锁相环技术[M].3版.姚剑清,译.北京:人民邮电出版社,2007.
[4]Kaplan E,Hegarty C J.GPS原理与应用[M].2版.寇艳红,译.北京:电子工业出版社,2007.
[5]Misra P,Enge P.全球定位系统信号、测量与性能[M].罗鸣,曹冲,肖雄兵,等译.北京:电子工业出版社,2008.
[6]Tsui J B Y.GPS软件接收机基础[M].2版.陈军,潘高峰,李飞,等译.北京:电子工业出版社,2007.
