控制系统中时序的研究
2015-03-25张泽宇
张泽宇
长春光学精密机械与物理研究所,吉林长春 130033
控制系统中时序的研究
张泽宇
长春光学精密机械与物理研究所,吉林长春 130033
随着工业技术不断发展,晶振发展也成为必然趋势,将会朝着小型化、低噪声、高频化、高精度、高稳定性、低功耗、快启动与低工作电压的发展方向进行开拓。目前晶振一般工作电压3.3V,很多产品电流损耗不超过2mA。应用的领域也越来广,主要应用在仪器仪表、工控系统、通信等。目前国内晶振生产行业正在摆脱低端产品的制造,向高端产品发展。
振荡频率;脉冲信号;时钟振荡器;
目前在国际市场上,各晶振生产企业正在积极地寻求降低产品成本的原材料,以实现产品的高端性能和低廉价格的最优化。石英晶体振荡器的应用日益广泛,尤其是在通信系统中,发展很迅速,技术上更加成熟。石英晶振在民用上主要应用于光纤网络、无线通讯及高速数字图像传输等,在这些领域中,石英晶体振荡器是其它类型的振荡器所不能替代的。石英晶体振荡器在发展过程中,也面临像频率发生器这类电路的潜在威胁和挑战。此类振荡器只有在技术上不断创新,才能延长其寿命周期,在竞争中占有优势。
1 晶振作用
所有的带有CPU的系统里必须有晶振,晶振的作用是不可取代的,它独立或和其他电路一起产生所需要的时钟频率,CPU的系统的指令都是依照时钟频率来进行工作的。晶振产生的频率越高,CPU的运算速度越快。数字电路都是按节拍来进行处理的而晶振就是提供这个节拍的,如果没有了晶振,也就没有了节拍,那也就不能处理任何数据了。
2 晶振原理
晶振最简化原理可以等效成阻容网络,由两个电容和一个电阻组成。考虑到可能有的各种干扰成分,将电路人为的加进各种保护电路,一般情况下采用负反馈电路提高稳定性,即使在高低温状态下,其他元器件的参数有所变化,也可以保证输出的频率范围在一定的范围内。晶振的电路图如图1所示。
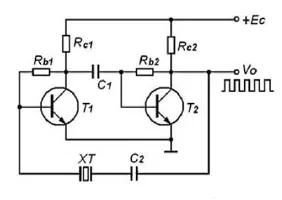
图1 晶振的电路图
3 晶振类别
按照晶振的工作方式不同可将晶振分为无源晶振和有源晶振两种类型。
3.1 无源晶振
无源晶振自身无法产生振荡信号,需要借助外围电路的配合才能输出时钟频率。其对输入的电压没有具体要求,当工作时,可根据外围输入的电压要求输出不同电压的时钟频率。
无源晶振电路图如图2所示。
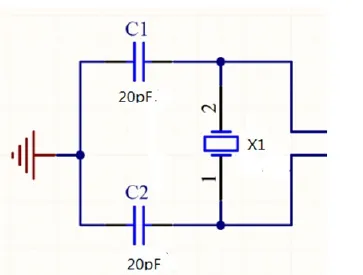
图2 无源晶振电路图
无源晶振其缺点是信号质量比较差,需要精确匹配外围电路,比较繁琐,更换不同频率晶振,外围电路参数也需要相对调整。无源晶振工作时,两脚之间的电压为0.1~2.5V左右,一般为供电电压的一半。两脚的电压不会一样,判断其好坏,可以测量两脚之间的阻值,应该是无穷大。
无源晶振在使用时经常会遇到以下两种情况。
1)不起振:这种情况是最常见的,当敲击上电复位后不起振的晶振时,晶振又恢复正常工作,这是欠激励现象,主要室由于激励功率不足导致起振时间过长。这时要选用能耗小的晶振,同时减少外界电容,缩短启动时间。
2)频率偏差大:这是过度激励现象,解决方法在芯片相关脚串接电阻调整至输出波形。
3.2 有源晶振
有源晶振可以脱离其它电路,独立工作,其内部不光有石英晶体,还集成了晶体管、集成电路及阻容元件。石英晶体具有压电效应,当在石英晶体的两极加入一定的电压后石英晶体会产生机械变形,机械变形产生了机械振动,机械振动会产生交变电电场,尽管变电电场非常微弱,但其频率是非常稳定的。当变电电场频率和石英晶体本身的固有频率相吻合时,会产生更强烈的机械振动,机械振动的幅度会急剧增加,这种现象称为“压电谐振”。
当有源晶振应用于CPU系统时,其不需要CPU系统的内部振荡器,信号质量稳定,抗干扰能力强,而且连接方式简单。在实际工作中有源晶振的电源输入端一般采用电源滤波器,电源滤波器可以有效地滤除电源纹波干扰,增强抗干扰能力;输出端一般采取电容输出滤波模式。
有源晶振电路图如图3所示。
时钟信号PCB板布线走线时尽量使它的长度短而宽,和其它PCB板的印制线间距尽量远一些,尽量紧靠器件布线,有时可能需要走内层,还可能需要用地线包围,避免对时钟信号造成干扰。
4 结论
本文详细介绍了在晶振使用方法以及问题的阐述,让我们更加了解晶振的重要性。从实际使用效果来看,当需要输出固定电压的振动频率信号时,有源晶振的效果好于无源晶振。
TN2
A
1674-6708(2015)148-0027-01
张泽宇,研究方向:电子仪器