基于ADAMS的模切机双肘杆机构的运动学仿真分析
2012-07-08高丽丽
高丽丽
(上海理工大学 上海 200093)
模切机是印刷包装行业压制纸盒、纸箱等纸制品的专用设备,是印刷包装行业中重要的表面装饰加工设备。而肘杆机构是压模烫印部分的核心部件,其性能的优劣直接影响印刷品的模切精度和整机速度。由于肘杆机构是一个既有转动副又有移动副的复杂的十杆机构,其运动特性分析起来比较复杂。采用计算机仿真的手段来分析机构的位移、速度和加速度,为肘杆机构的设计提供必要的数据和参考。对双肘杆机构的运动分析,主要有图解法和解析法等。图解法需要反复作图,较直观、方便,但是精度不高,而解析法人工计算工作量大,容易出错。ADAMS软件是虚拟样机技术典型的应用软件,应用ADAMS软件对模切机双肘机构进行运动仿真,与传统的平面机构运动分析方法如图解法和解析法相比,用ADAMS求解平面机构运动学具有精度高、速度快等特点。机构运动分析的本质为求解机构的输入构件与输出构件之间的位置、速度和加速度的映射关系。
1 建立模切机双肘杆机构及模切原理
在Pro/E中建立双肘杆机构的三维模型如图1所示。

图1 双肘杆机构的三维模型
模切机的工作原理是通过上、下平台接触对压完成模切工作。模切机的上平台固定不动,下活动模切平台由双肘杆机构带动上下运动。在模切机整个运动周期中,由于双肘杆机构各构件之间由铰链相连,与之相连的动平台不是直上直下的往复运动,而是“左右摇摆,上下起伏”地完成一个循环运动。可见,双肘杆机构工作性能和运动规律的优劣,对模切机的速度、精度及其稳定性都有较大影响。双肘杆机构简图如图2所示。

图2 双肘杆机构简图
由图2可知模切机双肘杆是由曲柄EOF、连杆DF和CE、上肘杆CG和DH、下肘杆CA和DB以及动平台GH组成,各杆的长度(单位:mm)分别为曲柄转速ω=9.376 rad/s。
2 模切机双肘杆机构的仿真
为了对双肘杆机构的运动规律和动态特性有更多的了解,需要得到模压活动平台以及各个杆的速度、加速度数据,在此应用ADAMS导入的双肘杆机构的虚拟样机模型,进行运动仿真。在ADAMS虚拟仿真环境中 ADAMS根据系统导入的模型自动建立拉格朗日运动方程,对每个刚体列出6个广义坐标带乘子的拉格朗日方程及相关的约束方程:
首先在Pro/E中建立双肘杆机构的模型,另存为 x_t 格式的文件,然后导入到ADAMS中进行仿真,首先选取适当的坐标系与单位,调整视图的位置,应用工具箱添加各个约束和驱动,其中曲柄为主动件,在其上添加运动,设定速度。模压活动平台与滑块间采用滑移副约束,其余杆件采用旋转副约束。在曲柄与地连接的转动副上添加驱动,设定旋转速度为曲柄转速ω=9.376 rad/s。创建完成后的双肘杆机构仿真模型如图3所示。曲柄EOF顺时针旋转,再点击仿真分析命令(simulation),设定动画仿真的时间和步数,就可以进行动画仿真了。
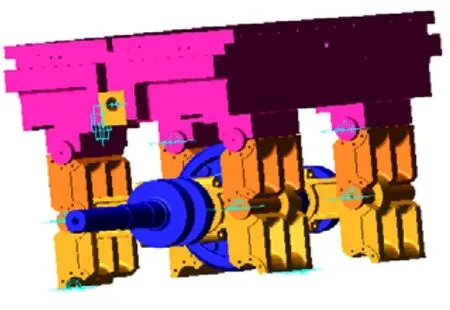
图3 双肘杆机构仿真模型
3 仿真结果及图形处理
以动平台和下肘杆为例,查看仿真结果曲线,进入ADAMS仿真后处理器点击后处理器中的(blocktracking)可测得任意时间对应的角位移、角速度、角加速度,并能直接取出最大和最小值。图4为动平台倾斜转角曲线,从曲线可以看出动平台左右摆动的幅度情况,图5为动平台滑动位移曲线。

图4 动平台倾斜转角曲线
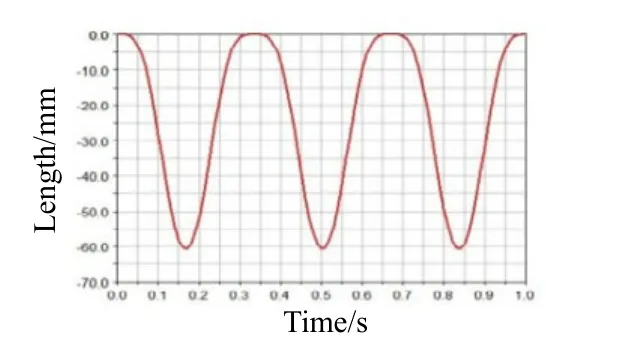
图5 动平台滑动位移曲线
从图4和图5中可以看出,尽管平台倾斜角度很小,但模压平台确实存在着左右摆动,这是影响其加工精度的重要因素之一。同时,在图5中还可以看到其运动的范围及极限位置,为安装和调试带来了便利。通过仿真,可以分析其运动的一些特性,这种手段不需要工程人员掌握复杂的解析法或数值分析等方法去分析其运动,也不需要多少仿真知识就可以轻易地对其运动作精确的定性和定量分析,从而指导机构的设计工作,十分便捷,提高了双肘杆机构设计的效率和质量。
以下为以肘杆为例绘制的仿真运动曲线,如图6、图7、图8分别记录了下肘杆AC和BD的角位移、角速度和角加速度的随时间变化的曲线。

图6 下肘杆AC和BD的角位移
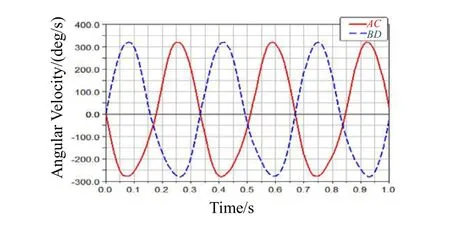
图7 下肘杆AC和BD的角速度
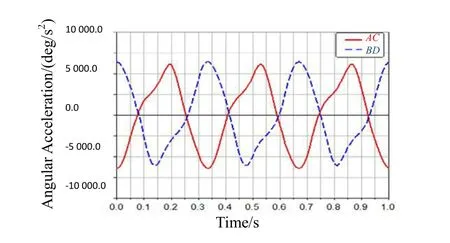
图8 下肘杆AC和BD的角加速度
机构的两下肘杆在一个运动周期内的角速度和角加速度曲线呈反对称,即当杆AC的位移、速度和加速度增大时,杆BD的位移、速度和加速度就减小,反之亦然。另外,从变化幅值上看,整个运动周期内两下肘杆的位移、速度和加速度变化较为平缓,符合模切机的运动规律。
4 结语
通过分析模切机双肘机构的运动参数和曲线后可以得到:
(1)模压活动平台在整个运动周期中并不是始终沿竖直方向进行往复运动,而是“左右摇摆、上下起伏”地完成一个循环运动。其倾斜角和水平方向位移只在最高点位置附近和最低点处为零,其它位置两者都不为零,水平方向的位移和倾斜角度越大,则平台和导向滑块之间的作用力就越大。模压活动平台左右摆动的角度最大值为0.686 7°,动平台上下移动的最大值为60.122 mm。
(2)从提高机构动态性能的角度看,最佳状态是模切机整个运动过程中动平台始终与上平台保持平行,而没有水平方向的偏移和倾斜角度,由于各构件之间由铰链相连,机构的运动特性就会决定动平台不是直上直下的往复运动。在满足工艺要求的前提下应尽量减小动平台的自由行程(指动平台从最高点到最低点位置所经过的位移),降低动平台水平方向的偏移和倾斜角,以提高模切速度、精度和整机的稳定性。
[1] 张选生,柴三中,成刚虎,等.用回路法分析自动模切机双肘杆机构[J].包装工程,2005,26(6): 51-53.
