一种主观的船舶碰撞危险度评价模型
2012-07-06刘茹茹胡勤友
刘茹茹,胡勤友
(上海海事大学 商船学院,上海 201306)
0 引言
随着航海事业的不断发展,尤其是近年来海上贸易运输频繁往来,航海人员生命安全及财产安全的保障受到更多关注.[1]为了提高航行安全,从20世纪70 年代末开始,船舶自动避碰系统的研究就已经受到国际航海学术界的高度重视,各种自动避碰方法不断出现,但是船舶会遇危险度的计算一直存在分歧.典型的计算模型一般只考虑最近会遇距离(Distance to Closest Point of Approach,DCPA)[2]和最近会遇时间(Time to Closest Point of Approach,TCPA)两个因素,缺少对其他因素的综合评价[3],影响船舶避碰的及时性和客观性.本文就船舶安全距离圈和最晚施舵时间的不同,建立一个新的评价模型,对同一会遇态势下安全距离圈和最晚施舵时间都不同的两船的碰撞危险度分别作出判断.
在有碰撞危险时,大尺度的船舶所需要的避让时间通常会更多,应早于小尺度的船舶采取避让措施.因此,有碰撞危险时的大船需要更大的安全距离圈和更多的最晚施舵时间,更早采取避碰措施.但是当两船距离很近时,大船对小船又会有船吸等现象,小船的危险度也会很大.[4]由此可知,在影响船舶碰撞危险度的其他因素(如船舶设备性能、周围环境等)[5]不变的情况下,安全距离圈大小不同、最晚施舵时间不同的船舶会遇时的危险度是不一样的.针对这种情况,本文建立一个新的危险度计算模型.
1 相关研究
碰撞危险度的计算有很多种方法,微观上大致可以分为以下几种[6]:
(1)DCPA和TCPA 加权确定方法.该方法是由KEARON 于1977 年最先提出的:

一般情况下,右舷来船a=5,b=0.5;左舷来船a=5,b=1;ρi值越小,来船越危险.但是SDCPA,i和tTCPA,i的单位分别是n mile和h,在相加时只计算数值而不考虑量纲显然有问题,而且该方法所定义的碰撞危险度评价值也并不能完全反映船舶的碰撞危险程度.
(2)数学方法.确定船舶碰撞危险度的数学方法有模糊推理和定义两种.用模糊推理方法研究操船者在交通密集海域感觉到的碰撞危险度是使用操船模拟试验结果[7],以相对距离及其变化率和相对方位变化率的模糊表现构造关于操船者对会遇现状及碰撞危险度判断的知识,用避让操船模型推断此时的主观碰撞危险度.虽然船舶碰撞危险度具有模糊性和随机性,用模糊数学方法确定船舶间碰撞危险度是个合适的方法,但是考虑的因素不够全面,而且利用人这个“数据融合系统”时会因其融合能力和融合正确性而影响结果.用定义方法确定船舶碰撞危险度是直接用时间碰撞危险度和空间碰撞危险度的组合将碰撞危险度的大小定义为
根据避碰实际,上述算子的定义是
①若udT=0,则uT=0;
②若udT≠0,utT=0,则uT=0;
③若udT≠0,utT≠0,则uT=max [udTutT]
定义中的uT是由udT和utT中较大值决定的,uT的值越大,来船越危险.
(3)人工神经网络方法.该方法将简单的人工神经元广泛连接,以模拟人脑行为和功能.该方法提出用多指标确定船舶碰撞危险度的人工神经网络模型[8],在实际计算中一般采取三指标(即SDCPA,tTCPA及来船位于本船是左舷还是右舷,在网络的输入端将左舷来船输入为0.1,将右舷来船输入为0.9).但是,若该方法所依据的思想或所建立的碰撞危险度模型不合适,则所得到的结果缺乏可信度.
(4)矢量解析法.在表现船舶碰撞各变量物理意义的基础上,采用矢量解析的方法求取船舶碰撞的判断条件.
(5)以船舶闭塞度作为碰撞危险度.[9]在避让操船中,所采取的避让操作量的大小与避让操船结果所残留的危险大小之间存在一种收支关系,两者同时减少的情况是不可能出现的.因此,提出以闭塞度或困难度作为船舶碰撞危险度.
另外,在宏观上有着眼于避让失败概率的方法、着眼于不可控制概率的方法、最佳避让操纵的方法、使用故障树分析(FTA)的方法等.[10]
上述方法都在逐步改善中寻求更适合自动避碰决策系统与自动避碰决策系统之间的避碰及自动避碰决策系统与人之间的避碰[11],但都有一定的局限性.由于决策取决于对危险度的认识和计算,安全距离圈大小不同、最晚施舵时间不同的船舶的操纵者对同一情况的认识就会不同,感觉到的危险度也不相同,作出的决策就会不相同.
2 新模型的建立
通常情况下,两船距离越近,碰撞危险度就越大.本文在以DCPA,TCPA 模型和可拓集合论确定海上船舶碰撞危险度模型[12]的基础上,建立一个基于不同船舶安全距离圈和最晚施舵时间的碰撞危险度计算模型.先定义一个船舶安全距离圈R:以船舶的重心为圆心,根据船舶操纵经验确定的半径值固定的一个圆形水域范围.顾名思义,一旦来船进入本船的安全距离圈即表示其对本船有很大的危险,需要采取避碰措施.航行环境不同,船舶安全距离圈的大小也不同,在狭水域的船舶安全距离圈自然要比宽水域的小.
假设两船在开阔水域会遇,本船为较大船舶,则可根据船舶安全距离圈的定义得到两船的安全距离圈.假设开始时本船在O 点,以速度VO航行;来船在P 点,以速度VP航行;来船进入本船的船舶安全距离圈的位置为A;本船的安全距离圈半径为RO;当来船从P 点到达本船的船舶安全距离圈A 点所需时间是T.本船与来船相对位置示意图见图1.
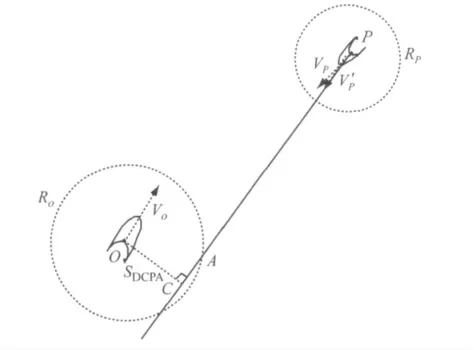
图1 本船与来船相对位置示意图
在图1 所示的会遇态势下,可以得到两船的SDCPA和tTCPA.在SDCPA和tTCPA加权方法计算的基础上,考虑到SDCPA与tTCPA的量纲不同,采用一个新的关系式计算本船的碰撞危险度

式中:Ro为本船的安全距离圈半径;To为主观上决定采取避让措施的最晚施舵时间,两者都是根据船舶驾驶员的经验及操作技术等取的定值.当式(1)中Ro-SDCPA和To-tTCPA中有一个的值小于0 时,即认为危险度为0.
对于来船,此时的SDCPA>RP,故其危险度ρP=0.经过一段时间tm后,两船的相对位置见图2,可得到来船的碰撞危险度计算公式

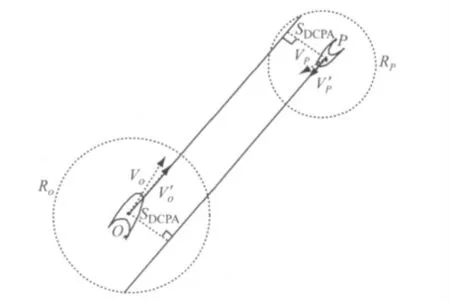
图2 经过tm后两船的相对位置示意图
图2中V'o表示本船对目标船的相对运动速度.由tm时刻前后两次危险度计算可以看出,ρo≠ρP,所以可以得出结论:安全距离圈大小和最晚施舵时间都不同的两船在会遇时,其碰撞危险度的值不同;也就是说,船舶操纵者对碰撞危险的认识是不同的.
3 实验验证
设本船在O 点,来船在P 点,船舶的坐标分别为(x,y),根据船舶操纵经验取船舶安全距离圈半径R和最晚施舵时间T,分别从两船对遇、交叉和追越3 种态势分析.
(1)两船对遇态势.设定参数见表1.
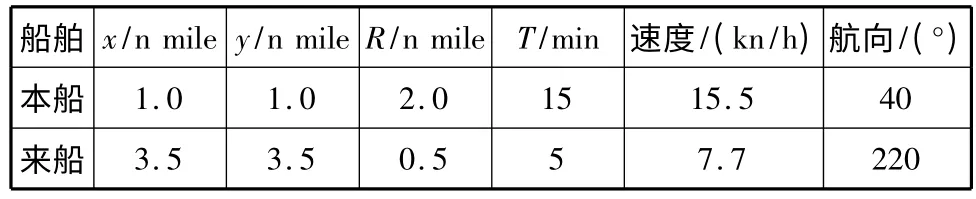
表1 两船对遇态势下的设定参数
由式(1)和(2)可以分别得出两船的危险度.在对遇态势下,随着两船的运动,其危险度变化见图3.
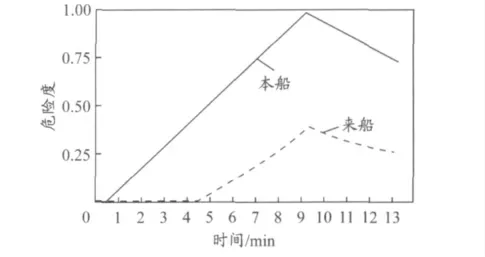
图3 对遇态势下两船危险度的变化
(2)两船交叉会遇态势1.设定参数见表2.
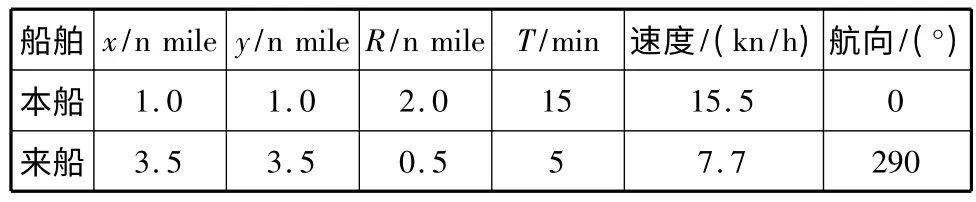
表2 两船交叉会遇态势1 下的设定参数
由式(1)和(2)可以分别得出两船的危险度.在交叉会遇态势1 下,随着两船的运动,其危险度变化见图4.
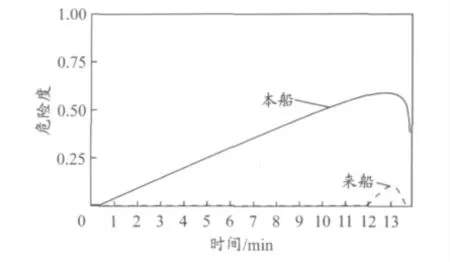
图4 交叉会遇态势1 下两船危险度的变化
(3)两船交叉会遇态势2.设定参数见表3.
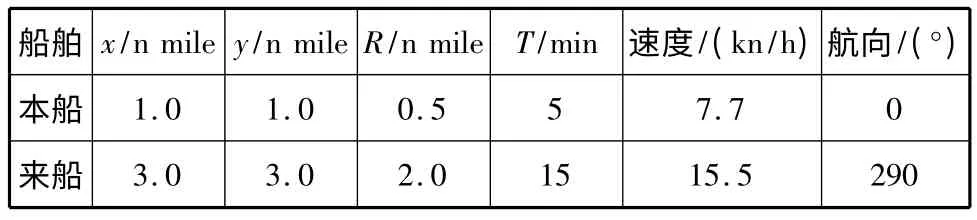
表3 两船交叉会遇态势2 下的设定参数
由式(1)和(2)可以分别得出两船的危险度,在交叉会遇态势2 下随着两船的运动,其危险度变化见图5.
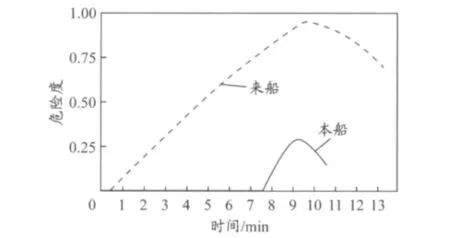
图5 交叉会遇态势2 下两船危险度的变化
(4)两船追越态势.设定参数见表4.
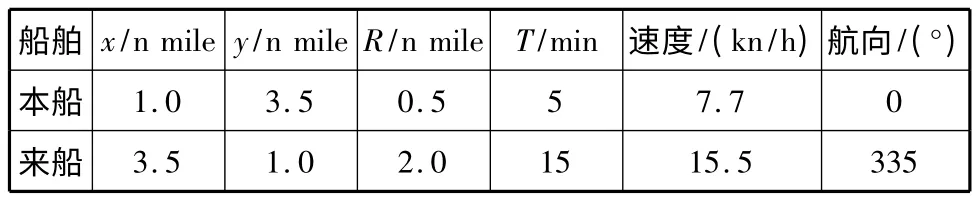
表4 两船追越态势下的设定参数
由式(1)和(2)可以分别得出两船的危险度.在追越态势下,随着两船的运动,其危险度变化见图6.
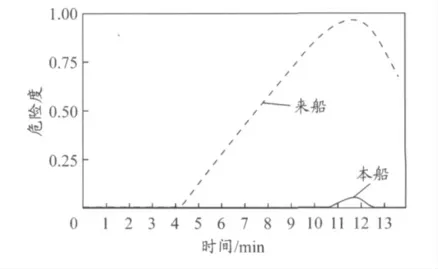
图6 追越态势下两船危险度变化
由以上实验结果可以看出:当两船会遇时,同一时刻安全距离圈较小、最晚施舵时间短的小船的危险性较小;当两船保持原运动状态继续运动时,小船的危险度不断增大,而安全距离圈较大、最晚施舵时间长的大船的危险度开始时一直较大,当最晚施舵时间短的小船进入大船安全圈时,大船的危险度增大为1(表示对大船来说很危险);当两船的距离很近,大船对小船的影响不可忽略时,小船的危险度仍在增大,甚至增大到1(说明此刻小船也很危险).整个模拟过程中,在两船的危险度没有全部达到1 之前,安全距离圈较小、最晚施舵时间短的小船的危险度始终小于安全距离圈较大、最晚施舵时间长的大船的危险度.
4 结束语
用模型计算船舶碰撞危险度,发现安全距离圈不同和最晚施舵时间不同的船舶操纵者对危险度的认识不同,这对不同的船舶根据自身对危险度大小的认识及时采取不同的避让措施有着重要的指导意义.但在实际情况下,每一船舶对前方船舶的开始避让距离要大于后方船舶的开始避让距离,右前方的一般大于左前方的,且一般情况下船舶都位于安全距离圈中心靠后的位置,因此本系统把船舶安全距离圈的几何形状当作一个对称圆形距离圈来处理是有一定缺陷的.
[1]EDWARD T G.Maritime accidents what went wrong[M].Houston,TX,U.S.:Gulf Publishing,1989:51.
[2]LI Lina,YANG Shenhua,SUO Yongfeng,et al.Automation method for personifying intelligent decision-making for vessel collision avoidance[C]// Proc IEEE Int Conf on Automation & Logistics (ICAL),2008.
[3]杨神化,施朝健,刘宇宏,等.多Agent 理论和技术在自动避碰决策系统中的应用[J].上海海事大学学报,2007,28(1):121-125.
[4]李伟,胡甚平,尤庆华,等.港口水域通航风险评价的未确知测度模型[J].上海海事大学学报,2009,30(3):13-17.
[5]郑中义,吴兆麟.船舶碰撞危险度的新模型[J].大连海事大学学报,2002,28 (2):1-5.
[6]苏开文.船舶避碰专家系统的研究[D].大连:大连海事大学,2007.
[7]林雪破.舰船避碰操纵专家系统的研究[J].舰船科学技术,2006(3):47-53.
[8]陆鑫.基于自动识别系统的船舶避碰专家决策系统应用研究与实现[D].成都:电子科技大学,2008.
[9]INOUE Kinzo,USAMI Shieru,SERA Wataru.Risk evaluation of collision avoidance in restricted water[C]// Proc Jpn Inst of Navigation,1993(89):187-195.
[10]彭丽丽.基于AIS 的内河船舶智能避碰专家系统及实现[D].武汉:武汉理工大学,2010.
[11]龚安祥,胡勤友,徐铁.SAGA:一种新的船舶搁浅预警模型[J].上海海事大学学报,2007,28(1):106-110.
[12]HU Qinyou,HU Qiaoer,Shi Chaojian.A negotiation framework for vessel collision avoidance[C]// Proc 2006 IEEE/WIG/ACM Int Conf on Intelligent Agent,Hongkong,China.2006:595-601.