图像清晰度评价函数在航空相机中的应用
2012-07-04许兆林王尚强
许兆林, 王尚强
(海军航空工程学院青岛分院,山东青岛 266041)
0 引言
航空摄影时,相机工作环境的大气压力和温度的变化使空气的折射率、透镜的曲率半径、透镜之间的间隔和镜头筒等产生相应的变化,从而使镜头成像面位置发生变化,造成影像模糊、分辨率降低。过去为获得高质量图像将航空相机安装在恒温恒压的密封舱以消除大气压力和温度的影响,由于密封舱对结构强度有要求,所以体积大,只能在特定飞机上安装使用,通用性差。目前航空相机消除大气压力和温度影响的方法:一是采用温度、压力传感器提供的温度、压力值,通过对成像位置影响的计算公式和实验数据进行补偿调整[1],由于需要对各型号相机进行大量的实验研究,以获得此型号相机温度和压力变化的调整数据,所以通用性差;二是采用光电自准直检焦方法[2],具有通用性好、控制精度高的特点,应用较为广泛。但由于需要控制扫描反射镜反复摆动通过光电探测器来获得光强的数据,存在控制环节多而复杂的不足。近年来,随着面阵CCD器件和数字图像处理技术的飞速发展,许多学者在基于图像清晰度评价函数的影像聚焦技术领域做了大量的工作,并在摄像机、地面数码相机、经纬仪等精密仪器得到应用[3]。对于航空CCD相机,如果直接用地物在CCD面上成像通过图像清晰度评价函数进行聚焦,从原理上说更为简单,但由于地物反差低甚至没有反差,经过试验,聚焦精度无法满足要求[4]。故提出了采用光栅成像通过图像清晰度评价函数聚焦的自准直检焦方法,该设计与光电自准直检焦方法相比,无需控制扫描反射镜反复摆动和配置光电探测器件等,检焦精度满足技术要求。
1 自准直检焦原理
自准直检焦系统组成如图1所示。
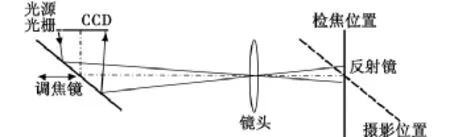
图1 自准直检焦原理Fig.1 Principle of autocollimating
自准直检焦系统由反射镜(垂直)、镜头、调焦镜、光源、光栅和CCD组成光学自准直系统,光栅和CCD位在同一面上。在空中某一高度摄影前,相机处于自准直检焦工作状态,反射镜垂直竖起,相当于光学自准直系统中的平面反射镜;由于航空摄影物距大,成像CCD面位于镜头焦面(零位)附近;光源照亮位于CCD面上的光栅,通过相机镜头后,经过反射镜反射回来,再次经过相机镜头,光栅成像在CCD面上;若CCD面位于镜头焦面上,光栅发出的光通过相机镜头后为平行光,经过反射镜反射回来,相当于无限远物距光栅经过相机镜头成像,光栅的像聚焦最清楚。反之,若CCD面不位于镜头焦面上,光栅的像存在一定的模糊,通过图像处理技术获取离焦信号,然后控制调焦镜移动使光栅的像聚焦最清楚。光栅的像最清楚位置为此时刻大气压力和温度数据下的镜头焦面(零位)位置,此位置消除了从地面到空中大气压力和温度的变化对镜头焦面(零位)位置的影响[5]。检焦结束后,反射镜与光轴成45°状态,再根据摄影斜距调整像距后拍摄。
自动检焦硬件结构框图如图2所示。
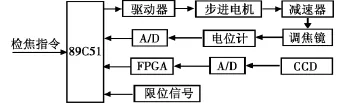
图2 硬件结构框图Fig.2 Diagram of the hardware structure
根据检焦指令,检焦是基于VHDL语言和FPGA处理芯片来完成的,采用Kodak公司像元尺寸为9 μm×9 μm的面阵CCD,其输出电信号经过A/D变换后,输出给图像处理部分的FPGA芯片(EP3SL50)。FPGA通过设置的图像清晰度评价函数,计算得到评价函数值后传递给89C51单片机,单片机按照程序流程,分粗检和细检两个过程控制步进电机(36BF005),通过三级齿轮组成的减速器带动调焦镜移动和电位计旋转,完成检焦过程。另外,装有限位开关,防止调焦镜走出行程范围。
2 图像清晰度评价函数的选取
图像清晰度评价函数的选取是自动检焦系统中的核心部分。它通过图像清晰度评价函数对不同聚焦位置所成像的清晰度进行评价,利用正确聚焦时图像最清晰这个特征找到最佳的聚焦位置[6]。自动检焦的过程就是求取图像清晰度评价函数最大值的过程,为实现快速和精度的要求,采用粗检焦与细检焦相结合的方式。
2.1 粗检焦图像清晰度评价函数
在粗检焦过程中,进行大步距采集图像,以较快的速度使调焦镜接近最佳检焦位置,缩短检焦时间,满足速度上的要求。
因为清晰聚焦的图像应有比模糊的图像更大的灰级差异,所以灰度差分法函数是一个应用较多的图像清晰度评价函数[7]。
灰度差分法函数定义为在选定图像区域内计算每个像元与其周围附近像元的对比度,函数表达式为
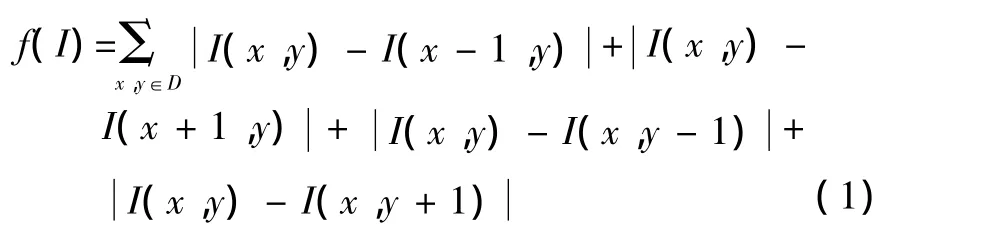
式中:I(x,y)是坐标为(x,y)的像元的灰度值;I(x-1,y),I(x+1,y),I(x,y-1),I(x,y+1)分别为像元(x,y)的邻近像元的灰度值;D为选定图像区域。
2.2 细检焦图像清晰度评价函数
作为细检焦图像清晰度评价函数要寻找最佳聚焦面位置,使检焦的精度符合要求。由于在聚焦愈接近最佳值,两信号的差值就愈小,因此,需选择进一步加强灰度对比的函数。
Brenner函数是对相邻近的像元灰度进行平方求和,其表达式为

式中:I(x,y)是坐标为(x,y)的像元的灰度值;I(x+1,y)为邻近像元的灰度值;D为选定图像区域。
检焦系统调焦镜的总行程为4 mm,粗检焦选择步长0.4 mm,用灰度差分法函数在CCD面上选定32×32像元的D区域进行计算,测试所得归一化曲线如图3所示,它的纵坐标表示采集光栅图像归一化的图像清晰度评价值,横坐标表示采集各幅图像的间距(步长)。用灰度差分法所得聚焦曲线有明显的单峰性,但是波峰较缓。虽然计算量小,能快速找到焦面附近,但是不能找到焦面准确位置。
细检焦选择步长0.02 mm采集光栅图像,用Brenner函数在选定32×32像元的D区域进行计算,测试所得归一化曲线如图3所示,横坐标表示各幅图像按步长0.02 mm采集。聚焦曲线具有陡峭的单峰性,在焦面附近变化率大,灵敏度高,能在小范围内判别离焦情况,保证了精度要求。
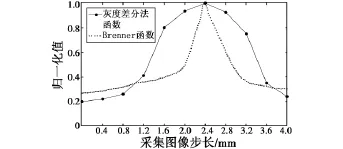
图3 归一化曲线Fig.3 The normalized curve
3 检焦流程
寻找图像清晰度评价函数值最大的位置采用的是爬山搜索法[8]。软件控制流程如图4所示。
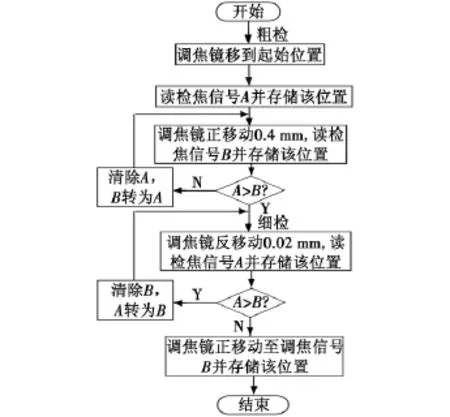
图4 软件流程框图Fig.4 Flow chart of the program
首先,粗检焦采用灰度差分法函数和大的步长。调焦系统的总行程为4 mm,选择步长0.4 mm,先将调焦镜移向一端起始位置,每走一步,采集一次位置电位器的输出和灰度差分法函数f(I)的输出并与前一次的数据相比较。若函数值逐渐增大,步进电机正转,调焦镜为正向移动;当函数值第一次出现减小时,说明已经越过焦面位置,此时,电机反转,调焦镜反向移动,转入细检焦过程。
细调焦采用Brenner函数和小的步长。步长定为0.02 mm,调焦镜反向移动,当函数值再次出现减小时,前一次的最大值位置即为最佳聚焦面。由于前一次的最大值位置与理想焦面(零位)之间的距离不大于半个步长,故其检焦误差不大于0.01 mm。
4 精度测试
采用密封舱在实验室模拟空中摄影时大气压力和温度的变化对系统检焦精度的影响。
4.1 测试装置
由于检焦精度要求高,直接测试调焦镜的位置精度非常困难,所以需采用光学测试方法,选用长焦距准直仪,其焦距是相机焦距3倍以上,通过调节准直仪分辨率板位置δ可以测出相机焦面误差Δf。当相机检焦完成后,把准直仪焦点位置上的分辨率板作为无限远的物,经相机镜头成像在CCD面上,如果检焦系统没有误差,其分辨率板的像最清楚和分辨率值最高;如果检焦系统存在误差Δf,再调节准直仪分辨率板位置,直至找出相机成像最清楚(分辨率最高)对应的分辨率板位置 δ,通过式(3)计算出检焦误差Δf[9]。

式中:f为相机焦距;f0为准直仪焦距。测试装置如图5所示,准直仪为 BU3000,其 f0=3000 mm;航空相机f=600 mm,相对孔径 N=1∶5.6,CCD 像元尺寸为9 μm×9 μm;摄影密封舱通过温压控制台控制压力和温度;相机测控台控制相机工作和CCD输出图像显示。
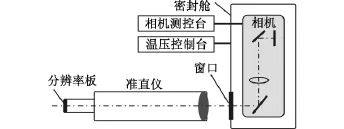
图5 实验装置Fig.5 Configuration of test equipment
4.2 测试结果
航空CCD相机检焦误差技术指标为0.01 mm。相机实际工作环境设计的是20℃的保温箱,且要求温度的变化率是每小时不超过2℃。在密封舱共设置了6组压力P和温度t数据模拟航空摄影状态。每一组数据设定后,相机系统稳定2 h以上,然后控制相机完成检焦工作。调节分辨率板位置,直至找到CCD输出的分辨率最大值所对应的δ位置,根据式(3)计算检焦误差Δf,如表1所示。
通过实验室测试可以看出,6种情况下,自动检焦系统的检焦误差在0.004~0.009 mm之间,满足技术指标的要求。
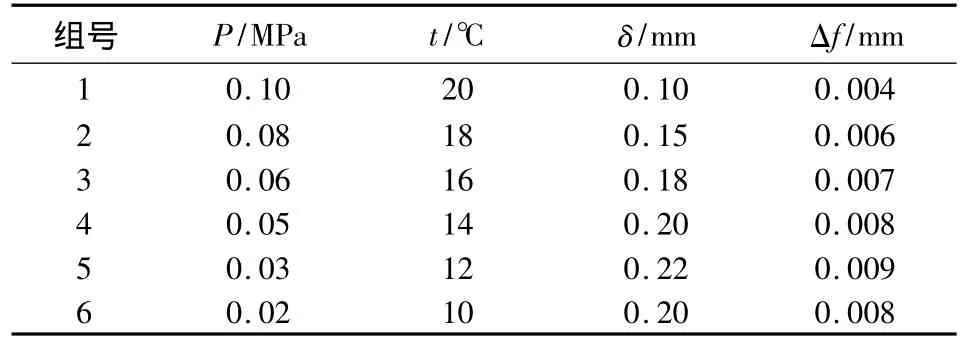
表1 模拟测量结果Table 1 Measurement results of simulated date
机载试验中,在3~10 km不同摄影高度拍摄三线靶标,由于机载分辨率值与自动调焦系统精度和像稳定系统的精度有关,因此机载分辨率值是一项综合指标。鉴定结论为:机载分辨率指标达到设计要求,影像清晰。
5 结论
图像清晰度评价函数在基于图像处理的自动检焦技术中起着关键的作用。通过选用两个不同的图像清晰度评价函数,分不同步长进行粗精检焦过程,不仅解决了图像处理的自准直检焦快速和精度问题,而且简化了检焦系统的配置。经过在实验室测试和试验证明:系统工作稳定可靠,取得了令人满意的检焦效果,保证了航空相机消除大气压力和温度影响同时获得高清晰度的图像。这种方法已经成为今后航空相机自动检焦技术发展的重要研究方向之一[10]。
[1]许兆林,赵育良,张国栋.新型航空相机自动调焦系统的设计[J].电光与控制,2011,18(4):77-80.
[2]惠守文.长焦距斜视实时航空相机离焦补偿[J].光学精密工程,2003,11(2):162-165.
[3]蒋海华.基于图像清晰度评价函数的显微镜自动调焦技术研究[J].光学技术,2008,34(s):284-285.
[4]史磊,金光,田海英,等.航空相机的自准直自动检焦方法研究[J].光学精密工程,2008,16(12):2460-2462.
[5]许兆林,贾晓笑,赵育良,等.长焦距航空相机系统[M].北京:海潮出版社,2005.
[6]蔡明荣,马军山,王福红.自动调焦系统中图像清晰度判别方法的研究[J].光学仪器,2008,30(5):35-37.
[7]贾晓飞,李宜斌,陈德智,等.非制冷红外热像仪的快速自动调焦算法设计[J].激光与红外,2009,39(6):689-690.
[8]宫光勇,何文忠,高旭辉.红外系统中自动调焦爬山搜索算法的优化设计[J].激光与红外,2007,37(11):1213-1215.
[9]苏大图,赵立平,沙定国.光学测量与像质鉴定[M].北京:北京理工大学出版社,2000.
[10]梁翠萍,李清安,乔彦峰,等.简析光学系统自动调焦的方法[J].电光与控制,2006,13(6):94-96.
