五桥臂逆变器驱动双异步电机调速系统的调制方法研究
2012-07-02王莉娜
刘 嘉,梅 杨,王莉娜,孙 凯
(1.北京航空航天大学自动化科学与电气工程学院,北京100191;2.北方工业大学电力电子与电气传动工程中心,北京100144;3.清华大学电力系统及大型发电设备安全控制国家重点实验室,北京100084)
1 引言
随着电力电子技术的发展,交流变频调速系统在工业传动领域中逐渐占据了主导地位。交流传动系统凭借其维护方便、电机结构简单、可实现高速驱动等优点[1],广泛应用于能源、机械、交通等国民经济的各个部门。传统的变频调速系统多由一台逆变器驱动一台异步电机运行,然而,在诸如电动汽车[2]、电动机车[3]及一些工业生产场合常需要驱动两台或者多台电机并联运行[4]。
针对实际应用中的需求,本文对五桥臂逆变器驱动双异步电机调速系统进行研究,并实现了通过一台五桥臂逆变器驱动两台异步电机独立运行。与通过多台逆变器驱动多台电机相比,该系统降低了成本、体积和重量[2]。
目前,对于五桥臂逆变器驱动双异步电机系统中逆变器调制方式的相关研究并不多见。法国科研人员[5]提出了一种通用多桥臂逆变器控制方法,通过逆变器输出线电压给定值的瞬时值,得出作用模式编号,再通过查表得出各开关器件的开关状态,产生相应的驱动信号。该方法适用于任意桥臂数量的逆变器,但随着桥臂数目增加,实现难度及复杂度也随之升高。日本学者Matsuse也提出了一种五桥臂逆变器的调制方法[6],其将逆变器控制周期分为两部分,根据所驱动的两台电机各线电压的大小确定PWM信号占空比及模式,进而确定逆变器的驱动信号。该方法由于驱动信号并不中心对称,且驱动信号跳变时刻分布不均,故难以采用DSP实现。本文提出一种适用于五桥臂逆变器的改进型七段式PWM调制方法。该方法将逆变器控制周期分为两部分并采用传统SVPWM方法生成逆变器开关器件的驱动信号,便于实现是该方法的一大特点。
2 五桥臂逆变器分析
五桥臂逆变器共有五个桥臂,十个开关器件。图1为五桥臂逆变器驱动双异步电机系统的主电路拓扑结构。为便于后文分析,将五桥臂逆变器的桥臂如图1中分为两部分:1号、2号、3号为一组,记为逆变器 A部分;3号、4号、5号桥臂为一组,记为逆变器B部分。其中,3号桥臂为逆变器AB两部分的公共桥臂,也是两台电机的共用桥臂。
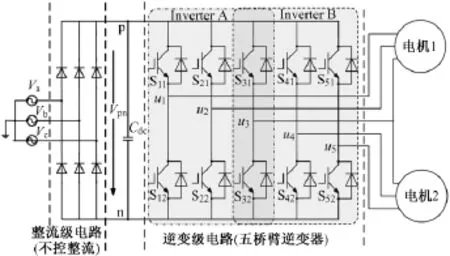
图1 五桥臂逆变器驱动双异步电机系统主电路拓扑结构Fig.1 Topology of dual-motor drive system's main circuit
3 五桥臂逆变器调制方法
为实现五桥臂逆变器的调制方式需完成对控制周期进行分区、确定驱动信号占空比及产生驱动信号等三步。为使得五桥臂逆变器能够独立驱动双异步电机,两电机给定定子电压矢量 us1、us2应相互独立。如图2所示,矢量 us1、us2分别按照角速度 ω1、ω2独立旋转,矢量幅值通过异步电机恒压频比控制方式确定。
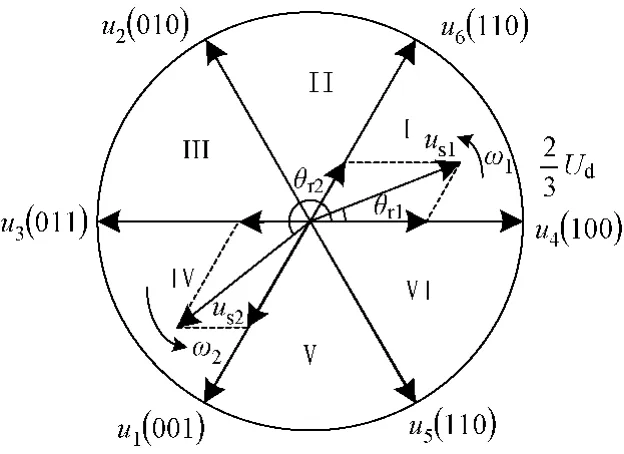
图2 双异步电机控制系统的定子电压矢量Fig.2 Voltage space vector of dual induction motor system
3.1 控制周期的分区
为实现两台异步电机独立控制,需要将逆变器的控制周期分为两部分。前半周期为逆变器A部分的有效作用时间,后半周期为逆变器B部分的有效作用时间。当逆变器 A部分作用时,桥臂1~3由SVPWM确定各开关器件驱动信号占空比,桥臂4、5将始终保持与公共桥臂3相同的开关状态,即在控制周期前半周期中,逆变器B部分作用的基本空间矢量均为0矢量(000或111)。同理,在控制周期的后半周期,当逆变器B部分作用时,桥臂3~5由SVPWM确定各开关器件驱动信号占空比,桥臂1与桥臂2也将始终保持与公共桥臂3相同的开关状态。
3.2 驱动信号占空比的确定
记定子电压矢量us1相位角为θr1,由伏秒平衡:
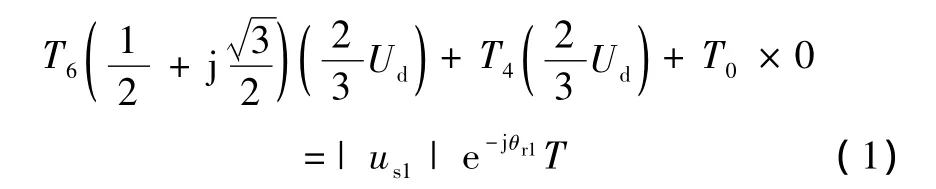
令式(1)实、虚部分别相等,基本空间矢量作用时间结果为
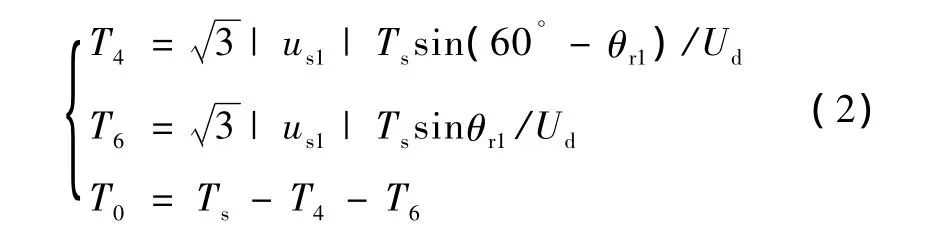
记控制周期的前半周期各桥臂上桥臂开关器件驱动信号有效时间为 Ta、Tb、Tc、Td、Te。令零矢量 u0与 u7作用时间相等,即T0=T7,可得七段式方法实现SVPWM的情况下,各开关器件有效作用时间为

同理可得后半控制周期各开关器件驱动信号的作用时间。
3.3 驱动信号的产生
表1为五桥臂逆变器的基本电压空间矢量所对应的逆变器各桥臂上开关器件的开关状态。其中,SABCDE1代表前半控制周期桥臂1-5上开关器件对应的开关状态,SABCDE2代表后半控制周期桥臂1-5上开关器件对应的开关状态,SABC代表三相逆变器的基本空间矢量所对应的各桥臂开关状态。当逆变器工作时,开关状态 SABCDE1与开关状态 SABCDE2将交替驱动逆变器的五个桥臂。
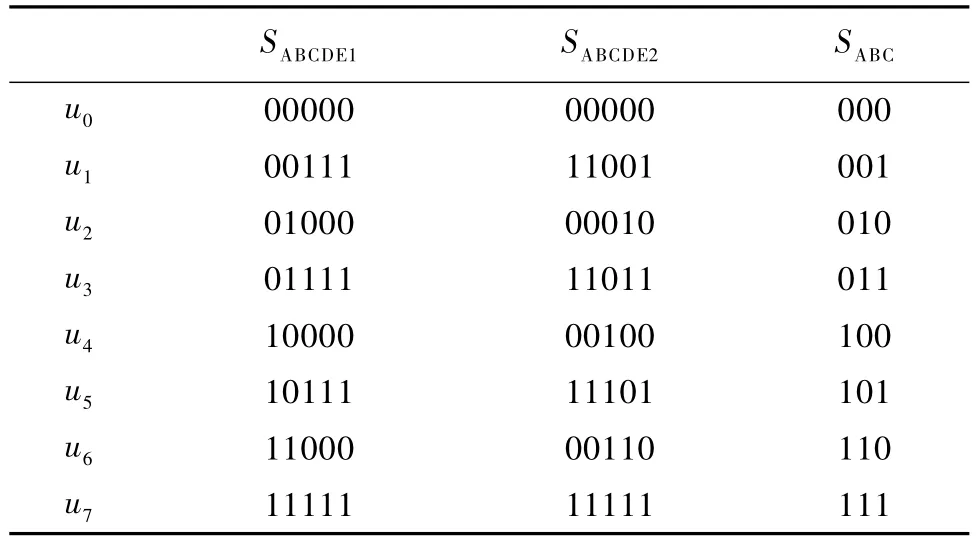
表1 五桥臂逆变器基本电压矢量对应开关状态表Tab.1 Switch status to basic vector of 5-leg inverter
按七段式SVPWM产生方式产生五桥臂逆变器驱动信号,电压矢量作用顺序及作用时间如图3所示(以图2中电压矢量位置为例)。图中,M1表示逆变器 A部分对应的基本电压矢量SABC,M2表示逆变器B部分对应的基本电压矢量SABC。
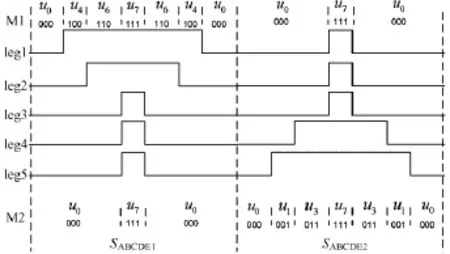
图3 五桥臂逆变器调制方式的实现Fig.3 Implementation of 5-leg inverter's control method
4 仿真及实验研究
为验证所提出的五桥臂逆变器的改进型七段式PWM调制方式有效性,对其进行仿真及实验研究。仿真采用Matlab/Simulink搭建整个系统的模型,仿真重点在于五桥臂逆变器驱动信号的产生。仿真中,直流母线电压设为200V,异步电机参数见表2。
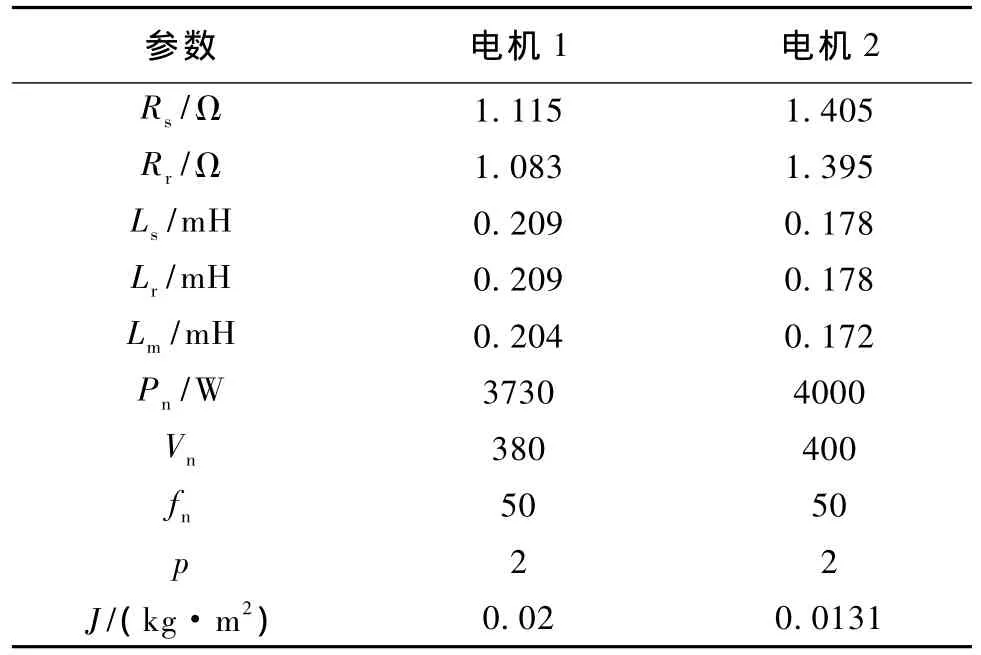
表2 仿真中所采用的电机参数Tab.2 Parameters of motors in simulation
系统实验平台结构如图4所示。其中,五桥臂逆变器采用两块型号为6MBP75RA120的智能功率模块并联组成,其中一智能功率模块一桥臂空闲。选用TMS320x2812作为逆变器的控制器,为智能功率模块产生PWM控制信号并完成逆变器的控制功能。系统中,电机1功率、电压、频率及转速额定值分别为 1.1kW、380V、50Hz、1420r/min,电机 2 的功率、电压、频率及转速额定值分别为3.7kW、380V、50Hz、1450r/min。通过调压器对输入三相交流电进行调整使得直流母线电压与仿真中一致,同为200V。
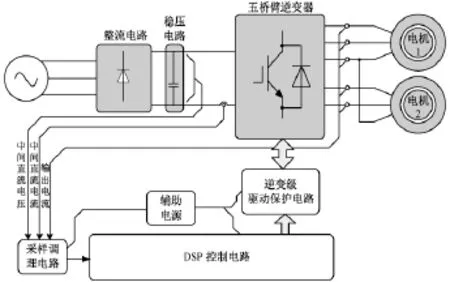
图4 五桥臂逆变器驱动双异步电机系统实验平台结构Fig.4 Structure of experiment platform
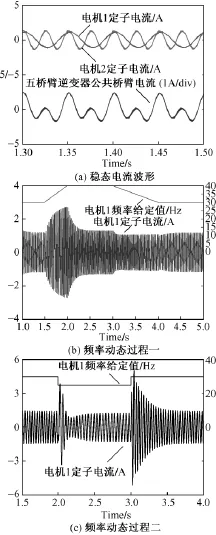
图5 系统仿真结果Fig.5 Simulation results of system
对系统进行稳态、动态运行的仿真和实验。稳态运行时,电机1和电机2分别在同步频率为20Hz和40Hz情况下稳定运行。动态实验中,电机1速度给定值按图中给定变化规律进行斜波或阶跃变化,电机2在同步频率为40Hz条件下稳定运行。电机1的频率给定值及定子电流的仿真及实验波形如图5和图6所示。
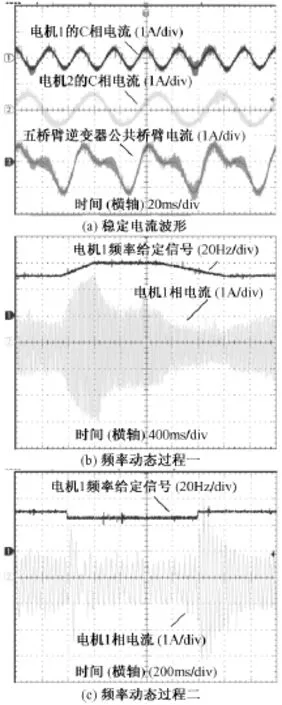
图6 系统实验结果Fig.6 Experimental results of system
由仿真及实验结果证明所提出的适用于五桥臂逆变器的改进型七段式PWM调制方式可行且有效。
5 结论
本文对驱动双异步电机系统的五桥臂逆变器的及其调制方式进行讨论和研究,提出了一种便于实现的改进型七段式PWM调制方式。仿真及实验结果表明调制方式有效,能够完成对两台参数不同的异步电机的独立控制,并可以在此基础上对五桥臂逆变器驱动双异步电机系统进行进一步的研究。
[1]赵相宾,年培新 (Zhao Xiangbin,Nian Peixin).谈我国变频调速技术的发展及应用 (About the development and application of variable frequency regulating speed technology in our country)[J].电气传动 (Electric Drive),2000,(2):3-6.
[2]Jain M,Williamson S S.Modeling and analysis of a 5-leg inverter for an electric vehicle in-wheel motor drive[A].2010 CCECE[C].Calgary,Canada,2010.1-5.
[3]林文立,刘志刚,孙大南,等 (Lin Wenli,Liu Zhigang,Sun Danan,et al.).基于最优粘着利用的地铁牵引电机并联控制策略 (Metro parallel-connected motor drive control based on optimized adhesion utilization)[J].电工技术学报 (Trans.China Electrotechnical Society),2010,25(6):24-30.
[4]高水华,彭佩怡,梅映新 (Gao Shuihua,Peng Peiyi,Mei Yingxin).多电机并联运行的应用研究 (Application of multi-machine run in parallel)[J].船电技术 (Marine Elec.& Electronic Eng.),2007,27(6):370-373.
[5]Delarue P,Bouscayrol A,Semail E.Generic control method of multileg voltage-source-converters for fast practical implementation[J].IEEE Trans.on Power Electronics,2003,18(2):517-526.
[6]Matsuse K.Sensorless vector control of parallel-connected multiple induction motor drives by a single inverter[A].IFPST2004[C].Beijing,China,2004.24-41.
[7]龙庆文,欧阳红林,朱思国,等 (Long Qingwen,Ouyang Honglin,Zhu Siguo,et al.).级联型多电平变频器的一种改进PWM调制法(Research on improved modulation strategy of cells cascaded multi-level converter)[J].电工电能新技术 (Adv.Tech.of Elec.Eng.& Energy),2009,28(1):76-80.
[8]松濑贡规 (Kouki Matsuse).Sensorless vector control of parallel-connected multiple induction motors fed by a single inverter[J].电工电能新技术 (Adv.Tech.of Elec.Eng.& Energy),2004,23(4):1-7.