电动自行车快速充电器的研究
2012-07-02朱世盘王春芳张志勇
朱世盘,王春芳,张志勇
(青岛大学自动化工程学院,山东 青岛266071)
1 引言
电动自行车作为中小城市人们出行的主要代步交通工具,其动力基本上来源于铅酸蓄电池。铅酸蓄电池作为电动自行车的核心部件,其充电技术一直不太成熟。传统的蓄电池充电方式有恒压充电、恒流充电、阶段式充电[1]。由于这些充电方式无去极化措施,会影响蓄电池的充电时间、容量和寿命。定电压正负脉冲快速充电方法具有恒压充电的特性,即在保持充电电压不变的情况下随着充电过程的进行蓄电池端电压逐渐升高,充电电流自动逐渐减小,符合马斯最佳充电曲线,遏制了极化现象。因而这种充电技术比较接近蓄电池充电接受特性,克服了一般快速充电因电流恒定不变不能适应蓄电池充电接受特性的缺陷。但是快速充电器的系统稳定性欠佳,通过设计合理的反馈补偿网络,改善了系统的响应。
2 电动自行车快速充电器
2.1 系统结构
系统框图如图1所示。系统由双管正激变换主电路、采样电路、单片机、SG3525、显示模块和隔离补偿网络组成。220V交流电经共模抑制和整流滤波后直接送给正激变换电路的输入端。主电路采用双管正激变换电路,使开关管承受的电压仅为单管时的一半,磁复位容易实现。辅助电源采用稳压管与LM7815配合为SG3525提供工作电压。SG3525经脉冲变压器提供PWM脉冲驱动信号给两个开关管,并实现对主电路的反馈补偿设计。由于SG3525是电压模式控制芯片,采样电路采集输出电压信号,并经光耦合器隔离后送给SG3525反馈输入端。单片机用于控制显示电路和蓄电池的放电回路。

图1 快速充电器系统结构图Fig.1 Fast charger system structure diagram
2.2 快速充电器主电路和控制电路
图2(a)所示为快速充电器的主电路图。功率开关管M1和 M2同时通断,由 SG3525控制。M3导通时蓄电池放电,M4导通时给蓄电池充电,M3和M4的通断由单片机PIC16F877控制。主电路的工作时序,阶段1,M4导通M3截止,给蓄电池充电;阶段2,M3和M4都截止,蓄电池恢复阶段;阶段3,M3导通M4截止,蓄电池经放电回路放电;阶段4,M3和M4均截止,这个阶段电池既不充电也不放电。
图2(b)所示为快速充电器的控制电路。辅助电源为SG3525提供工作电压。SG3525是采用电压模式控制的集成PWM控制器,振荡频率由接在管脚5、6、7处的电容、电阻决定。图腾柱输出两路互补PWM驱动信号。由于双管正激电路要求两管子同时通断,这里仅使用一路,并经脉冲变压器得到两路相同的驱动信号。管脚16能够提供5.1V的基准源,可用于隔离光耦合器的供电。管脚1为反馈信号输入端,配合管脚9可设计补偿电路。
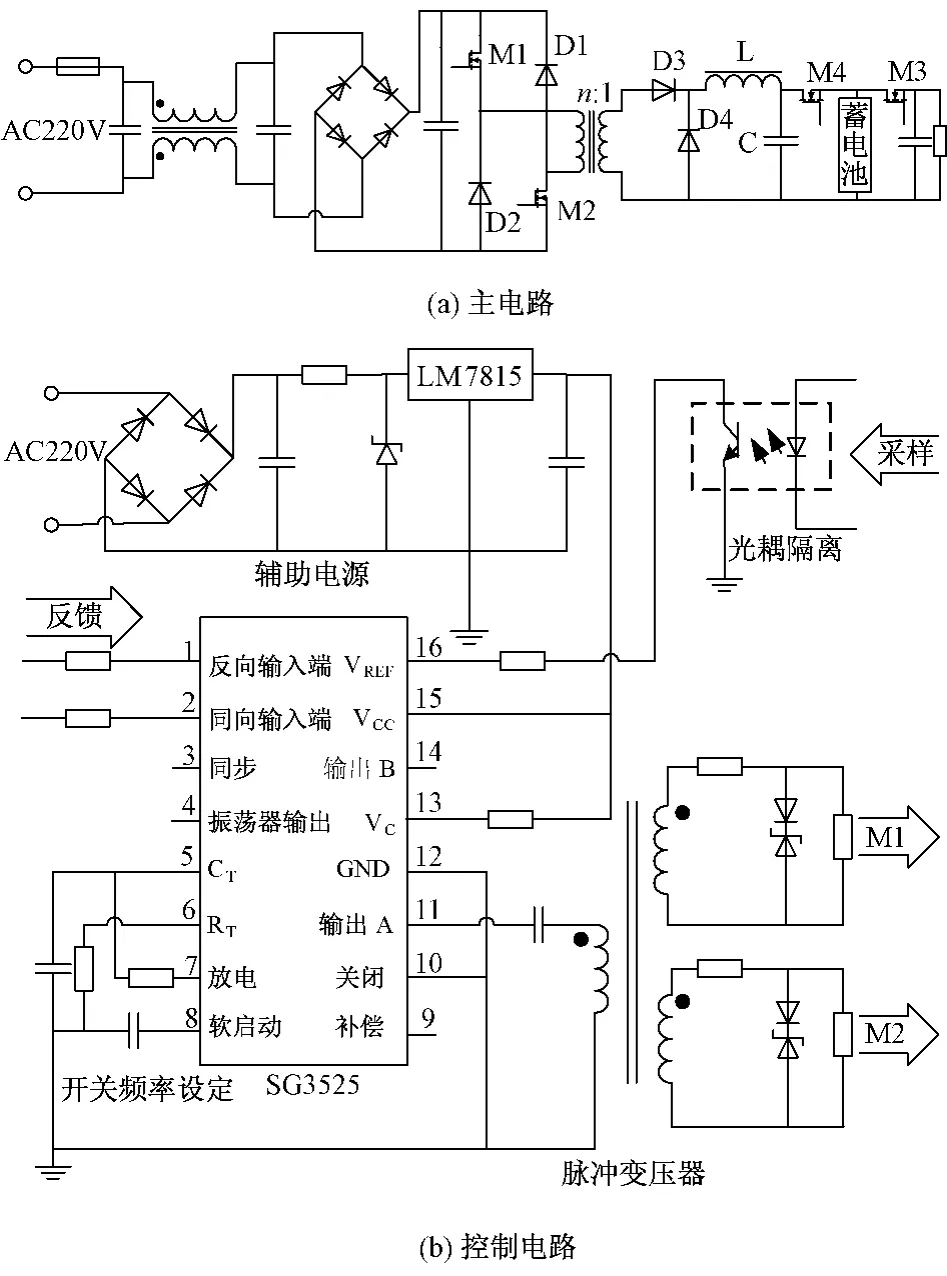
图2 快速充电器的主电路和控制电路Fig.2 Main and control circuits of fast charger
3 双管正激变换器反馈补偿网络设计
3.1 反馈补偿前系统波特图
正负脉冲充电方式对正激变换主电路要求具有更高的稳定性,为了使正激变换器满足静态和动态指标的要求,需要设计良好的反馈补偿网络。根据正激变换器的小信号模型[2],推得占空比至输出的传递函数为:

式中,输入电压Uin=310V;输出电压Uo=36V;变压器等效电感L=0.3mH;滤波电容 C=1000μF;假设蓄电池的电阻R=1~50Ω,占空比 D=0.3,变压器原绕组和副绕组的匝数比为n=2.58,取RT=1kΩ,RD=1kΩ,CT=0.01μF,则开关频率为 27kHz。将以上参数(取R=1Ω)代入Gud(s)得:

用 Matlab仿真,不加反馈补偿网络时的系统Bode图如图3所示。由图3可见,当R=1Ω时相位裕度为2.8761°。而R=50Ω时系统频率响应最差,此时系统的截止频率为 3.1963kHz,相位裕度为0.0575°。该系统的稳定裕度太小,系统参数的微小变化都有可能引起振荡,需要设计补偿网络。
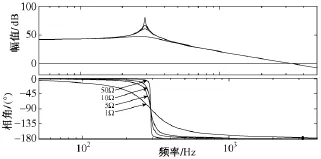
图3 反馈补偿前系统Bode图Fig.3 Bode graph before feedback compensation
3.2 反馈补偿设计
如图4所示的反馈补偿电路,输出电压经电阻分压得到2.5V电压后送给TL431,并与TL431内部提供的2.5V基准电压进行比较来控制流过光耦合器的电流。将SG3525内部的误差放大器接成电压跟随器,而将TL431内部的误差放大器设计成补偿电路。PWM模块的传递函数为:GM(s)=1/VM=1/2.5[3],电压采样电路传递函数为:

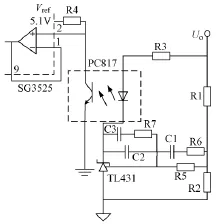
图4 反馈补偿电路Fig.4 Feedback compensation circuit
Gc(s)=Gc1(s)Gc2(s)为补偿网络的传递函数,取光耦合器的电流传输比CTR为1.5,则光电耦合器的传递函数为:

采用双极点-双零点补偿网络,TL431补偿网络的传递函数为:

其中各参量的定义见文献[4]。用补偿网络的一对零点ωz1和ωz2来抵消控制对象中的双重极点引起的相位滞后,设为与被控对象的极点角频率相等:

根据文献[5]将 ωp2选为5倍被控对象的穿越频率:

另一极点角频率ωp1比ωp2略小,选为2倍的穿越频率:

反馈补偿后双管正激变换器的开环传递函数为:

式中,蓄电池电阻取 R=1~50Ω;比例系数 K'用于调整增益。用Matlab仿真反馈补偿后系统的Bode图如图5所示,当 R=1Ω时,系统的相位裕度为53.3880°,幅值裕度为 10.5420dB,而 R=50Ω 系统的响应相对较差,此时系统的相位裕度为48.2622°,截 止 频 率 1.798kHz,幅 值 裕 度 为10.1217dB。可见,经反馈补偿后,系统的稳态误差、动态响应均得到改善,达到了设计的要求。
4 仿真与实验验证
根据反馈补偿后的开环传递函数,利用Simulink提供的仿真模块,搭建仿真模型如图6(a)所示,用模拟示波器所观察的输出电压的阶跃响应如图6(b)所示,响应速度满足设计的要求。

图5 反馈补偿后系统Bode图Fig.5 Bode graph after feedback compensation

图6 仿真Fig.6 Simulation
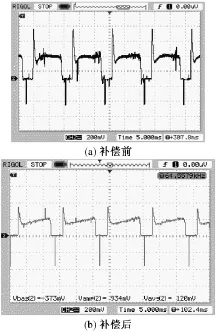
图7 充放电电流波形Fig.7 Charging and discharging current waveform
如图7所示是使用0.1Ω的电阻采样得到的正负脉冲充电电流波形,正负脉冲的频率在70Hz左右。负脉冲约为正脉冲的1.5倍。图7(a)为反馈补偿前的波形,经反馈补偿后的波形如7(b)所示,波形的超调量明显变小,干扰也得到抑制。
5 结论
研发了一种单片机控制的正负脉冲式电动车快速充电器。通过仿真和实际测试,证实这种快速充电器具有较好的动态和静态稳定性,抗干扰能力强,可以提升蓄电池的充电速度,延长蓄电池的使用寿命。
[1]侯聪玲,吴捷,李金鹏,等(Hou Congling,Wu Jie,Li Jinpeng,et al.).蓄电池充电方法的研究(Research on battery charging technology)[J].电源技术应用(Power Supply Technologies and Applications),2008,7(2):118-121.
[2]徐德鸿(Xu Dehong).电力电子系统建模与控制(Power electronics system modeling and control)[M].北京:机械工业出版社 (Beijing:China Machine Press),2005.
[3]王世伟,王春芳,张宁(Wang Shiwei,Wang Chunfang,Zhang Ning).列车用升降压变换器的研究(Research of buck-boost converter for trains)[J].青岛大学学报(工程技术版)(Journal of Qingdao University Engineering&Technology Edition),2008,23(1):88-93.
[4]张卫平(Zhang Weiping).开关变换器的建模与控制(Switch converter modeling and control)[M].北京:中国电力出版社(Beijing:China Electric Power Press),2006.
[5]蔡宣三(Cai Xuansan).开关电源的频域分析与综合(Analysis and synthesis of switching regulators in frequency domain)[J].电源世界(The World of Power Supply),2002,8(9):60-65.